
cartographer测试(1)——安装
参考官网文档:https://google-cartographer-ros.readthedocs.io/en/latest/compilation.html#system-requirements
ubuntu20.04 + neotic ros
sudo apt-get update sudo apt-get install -y python3-wstool python3-rosdep ninja-build stow mkdir catkin_ws cd catkin_ws wstool init src wstool merge -t src https://raw.githubusercontent.com/cartographer-project/cartographer_ros/master/cartographer_ros.rosinstall wstool update -t src sudo rosdep init rosdep update rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y src/cartographer/scripts/install_abseil.sh sudo apt-get remove ros-${ROS_DISTRO}-abseil-cpp
安装完成后,编译命令
catkin_make_isolated --install --use-ninja
2D数据集下载
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag
测试
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag
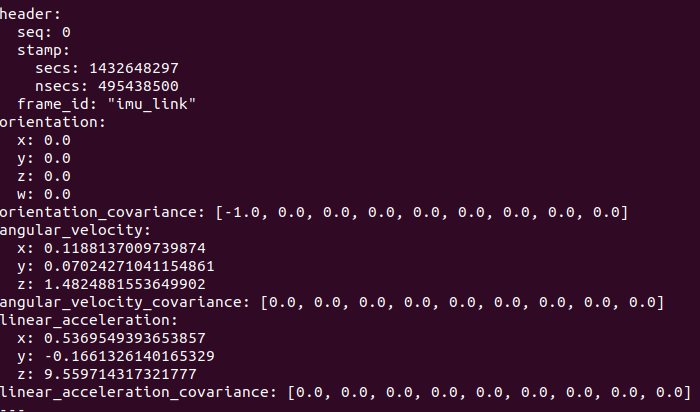
查看数据包的数据类型:包含IMU数据和激光雷达数据

imu的数据格式:frame_id、角度四元数、角速度、线加速度
地图保存
rosrun map_server map_saver -f carto1
2D纯定位数据包下载
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/b2-2016-04-05-14-44-52.bag wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/b2-2016-04-27-12-31-41.bag
2D纯定位数据包测试
roslaunch cartographer_ros offline_backpack_2d.launch bag_filenames:=${HOME}/Downloads/b2-2016-04-05-14-44-52.bag
roslaunch cartographer_ros demo_backpack_2d_localization.launch \
load_state_filename:=${HOME}/Downloads/b2-2016-04-05-14-44-52.bag.pbstream \
bag_filename:=${HOME}/Downloads/b2-2016-04-27-12-31-41.bag
landmark数据下载和测试
# Download the landmarks example bag. wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/mir/landmarks_demo_uncalibrated.bag # Launch the landmarks demo. roslaunch cartographer_mir offline_mir_100_rviz.launch bag_filename:=${HOME}/Downloads/landmarks_demo_uncalibrated.bag
Revo LDS数据下载和测试
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/revo_lds/cartographer_paper_revo_lds.bag roslaunch cartographer_ros demo_revo_lds.launch bag_filename:=${HOME}/Downloads/cartographer_paper_revo_lds.bag
PR2数据下载和测试
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/pr2/2011-09-15-08-32-46.bag roslaunch cartographer_ros demo_pr2.launch bag_filename:=${HOME}/Downloads/2011-09-15-08-32-46.bag
Taurob Tracker数据下载和测试
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/taurob_tracker/taurob_tracker_simulation.bag roslaunch cartographer_ros demo_taurob_tracker.launch bag_filename:=${HOME}/Downloads/taurob_tracker_simulation.bag
作者:水水滴答
本文版权归作者和博客园共有,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则保留追究法律责任的权利。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号