
GMOCK_LIBRARY的问题
https://zhuanlan.zhihu.com/p/404552723
在跟着上面教程,对cartographer配置clion环境时,报GMOCK_LIBRARY的错误
修改三个地方:
cartographer文件夹下的CMakelists.txt文件中GMOCK_LIBRARY改为GMOCK_LIBRARIES
cartographer/cmake/modules下的FindGMock.cmake文件中GMOCK_LIBRARY改为GMOCK_LIBRARIES(两处均要改)
编译的方式
cd ~/clion_carto_ws/
mkdir build;cd build
cmake .. -DCATKIN_DEVEL_PREFIX=../devel
make
这种方式用于clion里调试carto代码,修改src下的launch文件直接生效,和catkin_make_isolated --install --use-ninja的编译方式不同。在clion里调试不好的是launch文件不能起,且软件占用内存较大,容易卡。
另外,可以安装ROS插件,自动生成ROS空间,参考博客
https://blog.csdn.net/weixin_48592526/article/details/122256654
终端编译空间和clion编译空间一致,如下配置:
clion ==> setting ==> Build Execution ==> CMake ==> 配置分别如下:
RelWithDebInfo
-DCATKIN_DEVEL_PREFIX:PATH=/home/ht/carto_ws_0615/devel
/home/ht/carto_ws_0615/build
-- -j 6
修改clion默认编译工具:
clion ==> setting ==> Build Execution ==> Toolchains ==>配置如下:
/usr/bin/cmake
/usr/bin/gdb
终端起roslaunch cartographer_ros bslidar.launch
clion里面:Run ==> Attach to Process,在下拉框中选择cartographer_node来执行,可以debug
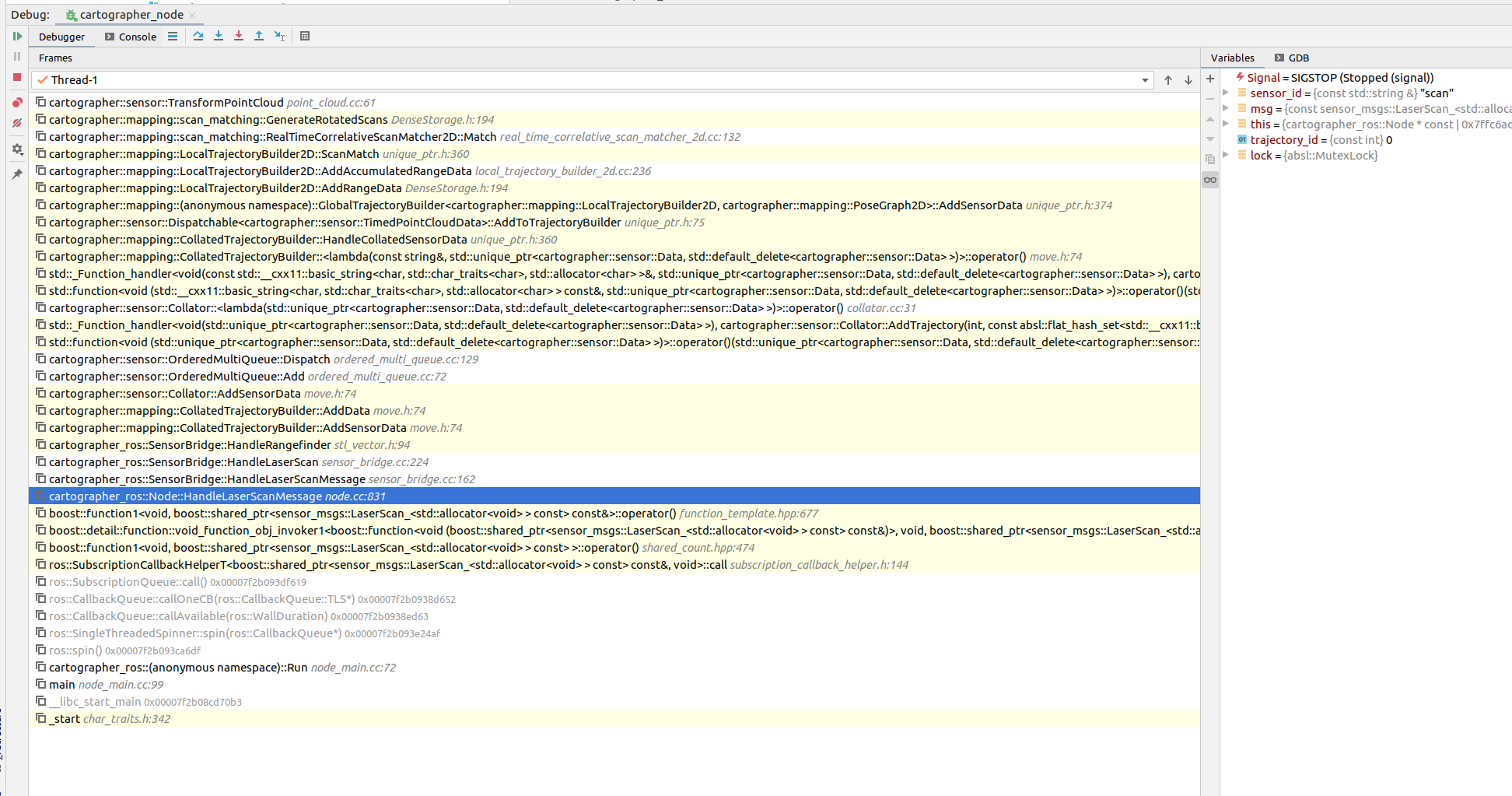
debug栏中可以看到线程信息,从下到上是执行调用到的函数,从这里就可以很清晰的看到数据流。
切换node debug的状态:左侧绿色竖线箭头Resume Program和停止按钮Pause Program来切换debug的状态。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号