
【3D】数据集整理ing
前言
最近需要把之前的检测任务联合实际场景作抓取实验,在此提前整理一下可能需要用上的数据集。
正文
1 YCB-Video

原项目网址:https://rse-lab.cs.washington.edu/projects/posecnn/
数据集网址:谷歌云盘
数据集介绍:accurate 6D poses of 21 objects from the YCB dataset observed in 92 videos with 133,827 frames
数据集标注信息:
(1) 中心:图像中3D模型原点的投影的2D位置;
(2) mask及对应的类别:对象的类标签;
(3) 深度图像;
(4) 相机内参;
(5) 6D Pose:图像中对象的6D姿态;
(6) 旋转平移矩阵:相机相对于第一帧的旋转矩阵R及平移矩阵T;
(7) 坐标信息:图像中每个像素在3D模型空间中的坐标。
数据集目标及购买链接:
2 GraspNet-1Billion
原项目网址:https://graspnet.net/index.html
数据集网址:https://graspnet.net/datasets.html
数据集介绍:It contains 190 cluttered and complex scenes captured by two popular RGBD cameras (Kinect A4Z and RealSense D435), bringing 97,280 images in total.一共有88个物体。
数据集标注信息:
(1)深度图像
(2)mask及对应的类标签
(3)6D pose
(4)相机内参
(5)对应的3D模型路径
(6)旋转平移矩阵:相机相对于第一帧的旋转矩阵R及平移矩阵T
(7)二指抓取标注
(8)遮挡标签
3 NOCS
原项目网址:https://github.com/hughw19/NOCS_CVPR2019
数据集网址:https://github.com/hughw19/NOCS_CVPR2019#datasets
数据集介绍:
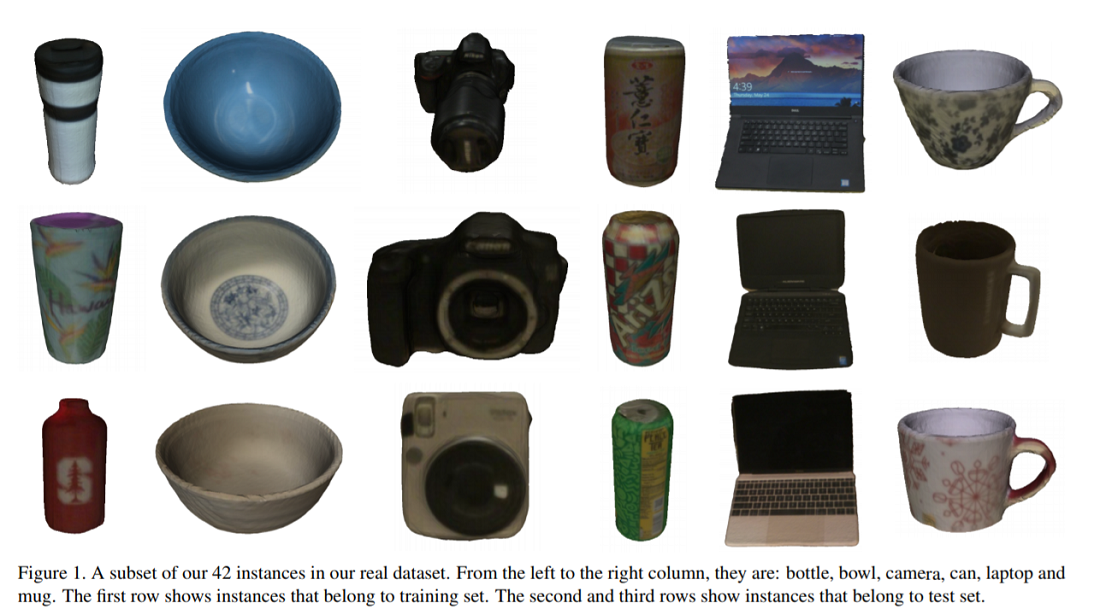
(1)以合成物体为目标,真实场景为背景,构建30万张混合现实图像
(2)以真实物体为目标,真实场景为背景,构建8000帧真实图像
(3) 一共六个类别:bottle, bowl, camera, can, laptop, and mug
(4)一张图像大致3~5个目标
数据集标注信息:
(1)NOCS map
(2)深度信息
(3)mask及对应的类标签
(4)对应的3D模型
(注:可通过计算得到6D姿态)
数据集目标及购买链接:
4 BigBIRD
原项目&数据集网址:http://rll.berkeley.edu/bigbird/
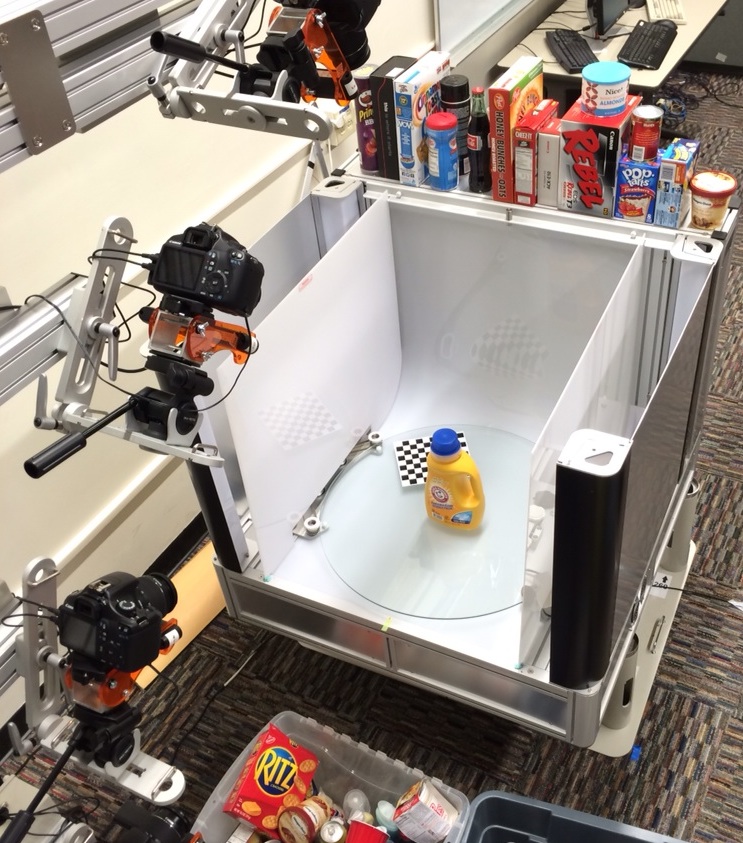
数据集介绍:针对于185个目标中的每一个目标,用5副不同角度的RGB-D相机同时对其进行拍照(下图NP1+N1~NP5+N5),然后转动载物的圆盘,对目标的不同角度进行拍照。最终得到5*120(角度数)=600张。

数据集标注信息:
(1)深度图像
(2)mask
(3)6D pose
(4)相机内参
(5)3D模型

 浙公网安备 33010602011771号
浙公网安备 33010602011771号