自控理论 第7章 频率响应补偿法
和基于根轨迹的补偿法一样,这一章的补偿法学得也非常非常浅。
7.1 超前补偿
7.1.1 超前补偿器的特性
超前补偿器的传函
称之为超前是因为其频率响应的相角始终大于0
作出奈奎斯特曲线来进一步研究其特性,先求其实部和虚部
发现曲线刚好是个圆,因为
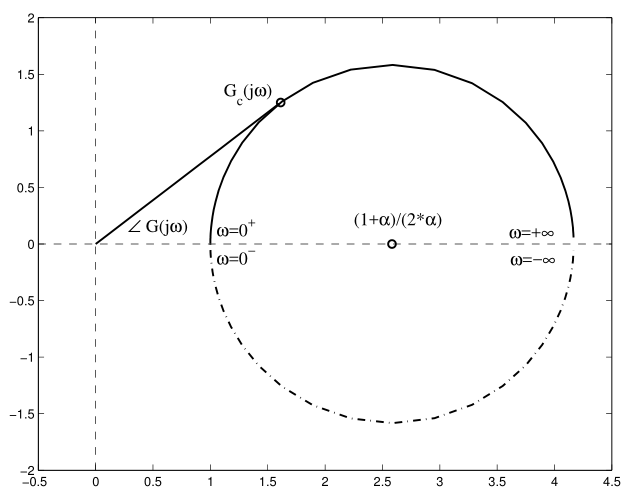
从奈奎斯特曲线中很容易看出补偿器能补偿的相位有一个最大值,对\(\angle \tilde G(j\omega)\)求导可以得到在\(\omega=\omega_m=\frac{1}{\sqrt\alpha T}\)时取得最大相位
其伯德图如下
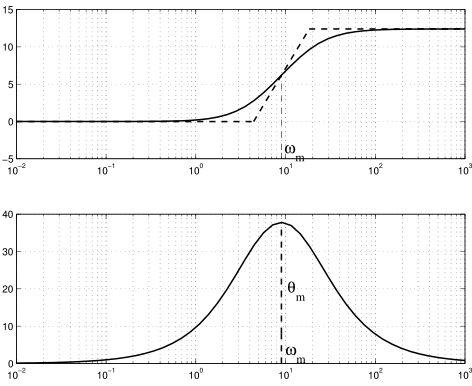
使相角取到最大的\(\omega_m\)刚好再两个转折频率的正中间。
7.1.2 通过伯德图设计超前补偿器
- 原理:超前补偿器可以增加相位 ==> 增大相位裕度 ==> 增大幅值交越频率 ==> 增大截止频率、增大带宽 ==> 改善暂态响应、改善稳定性
- 和根轨迹补偿法的解释的出发点不一样,但结果都是一样的
- 根据要求确定增益\(K\alpha\)
- 由原来的相位裕度确定需要补偿的相角,也即确定超前补偿器的\(\theta_m\)
- 一般还会流出\(5^\circ\)的富余
- 由\(\theta_m\)计算\(\alpha\)
- 由\(\alpha\)计算补偿器相位取得\(\theta_m\)时对应的增益,在原伯德图上找到与该增益相反的点对应的频率,取该频率为\(\omega_m\)
- 由\(\omega_m\)计算\(T\),得到完整的补偿器
- 验证要求是否满足,不满足则改变\(\theta_m\)重新进行2~6步。
7.2 滞后补偿
7.2.1 滞后补偿器的特性
只要把7.1.1的\(\alpha\)换成\(\beta\)就可以得到,不过因为\(\beta>1\)而在有些地方刚好反了以下。
滞后补偿器的传函
称之为超前是因为其频率响应的相角始终大于0
作出奈奎斯特曲线来进一步研究其特性,先求其实部和虚部
发现曲线刚好是个圆,因为
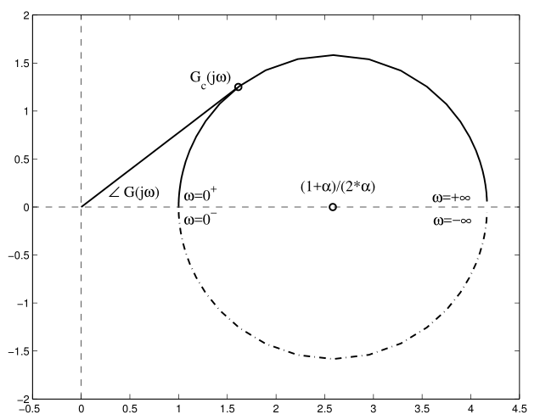
从奈奎斯特曲线中很容易看出补偿器能补偿的相位有一个最大值,对\(\angle \tilde G(j\omega)\)求导可以得到在\(\omega=\omega_m=\frac{1}{\sqrt\beta T}\)时取得最大相位
其伯德图如下
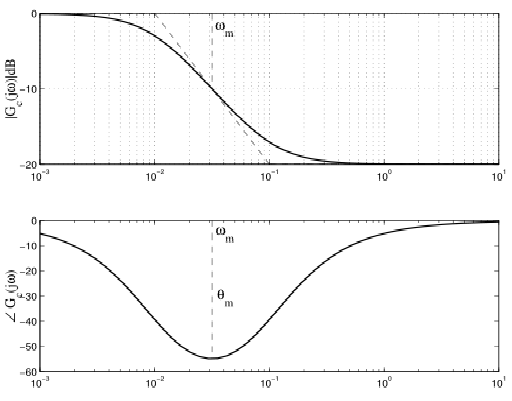
有\(\lim\limits_{\omega \rightarrow \infty}20\log\left|\tilde{G}_{\mathrm{c}}(j \omega)\right|=20\log\frac{1}{\beta}\),也即是说滞后补偿器最多可以下压幅值响应\(20\log\frac{1}{\beta}\)
7.2.2 通过伯德图设计滞后补偿器
- 原理:滞后补偿器有明显的低通特性,会把高频的幅值响应向下压,也等效于向左移 ==> 减小幅值交越频率 ==> 减小截止频率、降低带宽,但同时增加相位裕度和幅值裕度
- 滞后补偿会带来一个单峰的负相位,如果这个负相位处于幅值交越频率附近,则会减小相位裕度,不利于系统的稳定性,所以设计时一般都让这个负相位在负值较大时就出现,即取\(\frac{1}{T}\)和\(\frac{1}{\beta T}\)都为较小的值
- 根据要求确定增益\(K\beta\)
- 由原来的相位确定新的幅值交越频率\(\omega_m\)的位置
- 由\(\omega_m\)对应的幅值确定\(\beta\)
- 根据经验估算\(T\),得到完整的补偿器
- 例题中取的\(T=\frac{5}{\omega_m}\)
- 验证要求是否满足
7.3 PID控制
只算是提了一下吧
-
微分控制器的实现
纯粹的微分控制器会放大高频噪声,不好,一般用这个在低频上像一个微分控制器的、高频上像一个跟随器的:\(\frac{1}{1+\frac{1}{Ts}}\)
-
PID参数的整定
介绍了齐格勒-尼科尔斯方法,该方法可以借助开环系统的阶跃或者频率响应,为参数整定选取一个较为合理的初值。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号