自控理论 第6章 II 相对稳定性、伯德图和闭环频率响应
6.4 相对稳定性分析
前边的讨论大多局限于稳定或不稳定,现在讨论如果稳定,能有多稳定。这在实际中是很需要的,毕竟实际中充满了干扰。
6.4.1 使用保角变换分析相对稳定性
等我之后复习(预习)一下复变函数再过来补这一节吧。。。
6.4.2 \(\mathcal H_\infty\)控制
健壮(robust)控制(实在不想用“鲁棒”这种莫名其妙的翻译💢)相关,不会先留着。。。
6.4.3 幅值裕度和相位裕度
定义
-
幅值裕度
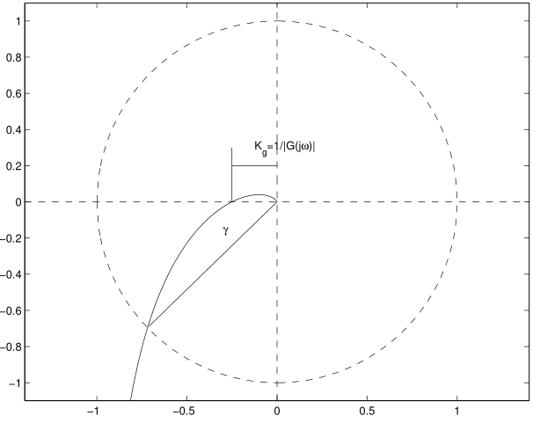
定义相位交越频率\(\omega_1\in(0,\infty)\),其满足\(\angle G_o(j\omega_1)=-\pi\),则幅值裕度为
\[K_g=\frac{1}{|G_o(j\omega_1)|} \]使用分贝表示则是(用的多)
\[K_g\mathrm{dB}=20\log K_g=-20\log |G_o(j\omega_1)| \]-
当讨论幅值裕度的正负时,讨论的就是用分贝表示的,容易知道,当\(|G_o(j\omega_1)|\ge1\)时,\(K_g\mathrm{dB}\le0\),反之则\(K_g\mathrm{dB}>0\)。
-
假如奈奎斯特曲线来回穿越实轴,也即是有多个\(\omega\)满足\(\angle G_o(j\omega)=-\pi\),这时候幅值裕度该取哪一个点来计算?
课上没有提但是有个题涉及到了,我自己感觉如果稳定当前系统稳定,该取\((-1,j0)\)左侧最近的点;如果不稳定,该取右侧最近的点。
-
-
相位裕度
定义幅值交越频率\(\omega_2\in(0,\infty)\),其满足\(|G(j\omega_2)|=1\),则相位裕度为
\[\gamma=\pi+\angle G(j\omega_2) \]
幅值裕度和相位裕度单独使用不能描述系统的相对稳定性,合在一块才可以。
最小相位系统裕度的图形意义
-
一个幅值裕度和相位裕度都很大的系统,比较稳定
-
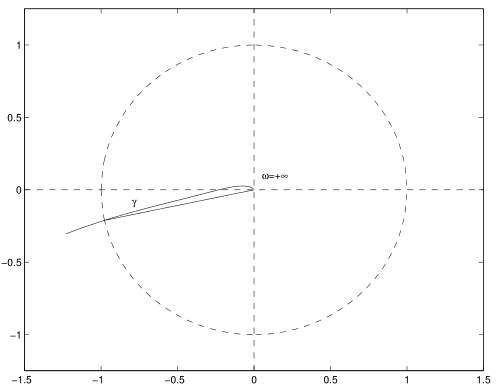
一个幅值裕度很大但是相位裕度很小的系统,对相角的扰动很可能使系统不稳定
-
一个幅值裕度很小但是相位裕度很大的系统,对幅值的扰动很可能使系统不稳定
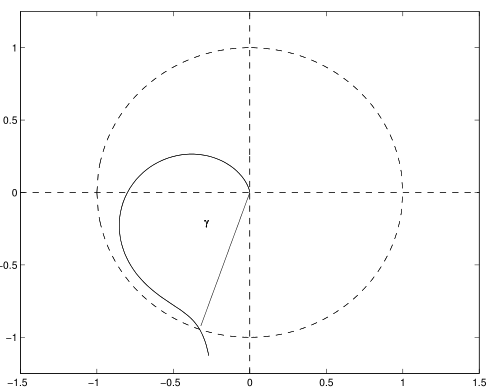
上述几幅图说明,对于最小相位系统,只有幅值裕度和相位裕度都大于0系统才能稳定。
- 注意,该结论只对最小相位系统成立。
6.5 伯德图
奈奎斯特图中频率没有得到定量体现,伯德图在这方面可以作为补充。
6.5.1 引入
- 使用对数的原因
- 横坐标\(\omega\):系统需要考虑的频率很宽有可能从及赫兹(机械结构)到几兆赫兹(电子系统)
- 纵坐标\(|G(j\omega)|\):系统经常需要作出修正,对数将乘法化为加法看起来更直观。
- 定义:对数化的频率响应曲线即是伯德图
- 振幅响应两个轴都取对数
- 幅角相应只有横轴取对数
6.5.2 常用环节的伯德图
常数环节
表达式如下
微/积分环节
表达式如下
一阶微分/惯性环节
-
表达式
\[G(j\omega)=(1+j\omega T)^{\pm1}\\ \Rightarrow \left\{ \begin{aligned} 20\log\left|G(j\omega)\right|&=\pm20\log\sqrt{1+(\omega T)^2}\\ \angle G(j\omega)&=\pm\arctan(\omega T) \end{aligned} \right.\\ \] -
渐近线
可以通过\(\omega T\)与\(1\)的大小关系作伯德图的渐近线,以\(\frac{1}{1+j\omega T}\)为例(下边的讨论也是一样,毕竟一阶惯性环节见得多):
\[-20\log\sqrt{1+(\omega T)^2}\mathrm{dB}\approx \mathrm{Asym(\left|G(j\omega\right|)}= \left\{ \begin{aligned} &0\ & for\ \omega T\ll 1\\ &-20\log\omega T\ & for\ \omega T\gg1 \end{aligned} \right. \]\(\mathrm{Asym}\)指渐近线asymptote。
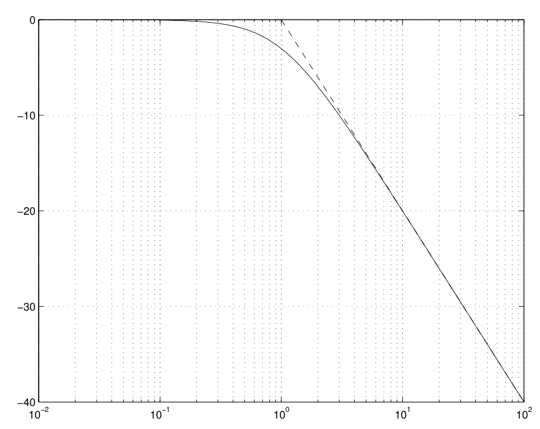
横轴是\(\omega T\)。
-
渐近线的误差
渐近线与完整的幅值响应之间的误差由上图很明显在中间(\(\omega=1\))时最大,在两头则很小,可以具体计算一下:
\[\begin{aligned} \mathrm{Err}(\omega)&=20 \log |G(j \omega)|-\operatorname{Asym}(|G(j \omega)|) \\ &= \begin{cases}-20 \log \sqrt{1+(\omega T)^{2}} & 0<\omega T<1, \\ -20 \log \sqrt{1+(\omega T)^{-2}} & \frac{1}{T} \leq \omega T<\infty .\end{cases} \end{aligned} \]误差最大出现在\(\omega T=1\)处,此时\(\mathrm{Err}(\omega)\approx -3.01\),所以\(-3dB\)是一个在手绘伯德图中经常会见到的数。
后边还会遇到一个\(3\mathrm{dB}\),不过出发点不一样。
-
-
相位
虽然取了对数,但是相位仍然是关于\((1,\frac{\pi}{4})\)对称的,原因主要在于\(\arctan(\omega T)+\arctan{\frac{1}{\omega T}}=-\frac{\pi}{2}\)
需要熟悉几个点:
\[\angle\frac{1}{1+j\omega T} \left\{ \begin{aligned} &\approx 0\ &\omega T\ll 1\\ &= -\frac{\pi}{4}\ &\omega T=1\\ &\approx -\frac{\pi}{2}\ &\omega T\gg 1\\ \end{aligned} \right. \]
二阶微分/振荡环节
-
表达式
\[G(j\omega)=[(\frac{s}{\omega_n})^2+2\zeta\frac{s}{\omega_n}+1]^{\pm1}\\ \Rightarrow \left\{ \begin{aligned} 20\log\left|G(j\omega)\right|&=\pm20\log\sqrt{\left[1-(\frac{\omega}{\omega_n})^2\right]^2+\left(2\zeta\frac{\omega}{\omega_n}\right)^2}\\ \angle G(j\omega)&=\pm\arctan{\frac{2\zeta\frac{\omega}{\omega_n}}{1-(\frac{\omega}{\omega_n})^2}} \end{aligned} \right. \] -
渐近线
\[\mathrm{Asym}(|G(j\omega)|)= \left\{ \begin{aligned} &0\ &\frac{\omega}{\omega_n}<1\\ &-40\log{\frac{\omega}{\omega_n}}\ &\frac{\omega}{\omega_n}\ge1 \end{aligned} \right. \]- 注意到\((1+s/\omega_n)^{\pm2}\)的伯德图的渐近线、相角的特殊点与二阶微分/振荡环节的完全相同,这说明一个标准二阶系统\(\frac{1}{(\frac{s}{\omega_n})^2+2\zeta\frac{s}{\omega_n}+1}\)可以用\(\frac{1}{(1+s/\omega_n)^2}\)近似。
- 一阶环节渐近线误差只与\(\omega T\)有关,而二阶环节渐近线的误差不仅和\(\omega/\omega_n\)有关,还受\(\zeta\)控制,具体可以看下边的图。
-
相位
这里相位响应仍然关于某点对称,虽然不是很直观,但推导思路很简单,就是取对称点带进去算,就不记笔记啦。
需要熟悉几个点:
\[\angle\frac{1}{(\frac{s}{\omega_n})^2+2\zeta\frac{s}{\omega_n}+1} \left\{ \begin{aligned} &\approx 0\ &\omega\ll\omega_n\\ &= -\frac{\pi}{2}\ &\omega=\omega_n\\ &\approx -\pi\ &\omega\gg\omega_n\\ \end{aligned} \right. \] -
共振
关于不同\(\zeta\)的伯德图如下:
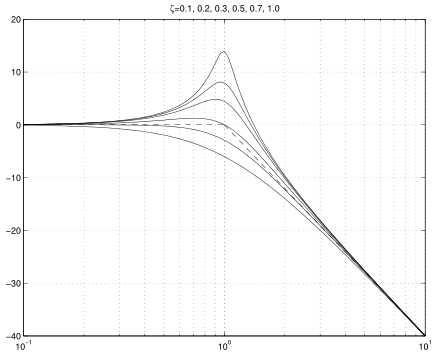
此处的横坐标是\(\omega/\omega_n\)。
当\(\zeta\)处于一定范围时,振幅响应会先增加后减小,其中能使幅值取到极大值的频率就称为共振频率,记为\(\omega_r\)(r指共振resonance),通过对振幅响应求导数等于0可以得到
\[\omega_r=\sqrt{1-2\zeta^2}\omega\\ |G(j\omega_r)|=\frac{1}{2\zeta\sqrt{1-\zeta^2}} \]由此还可以知道只有当\(\zeta<\frac{\sqrt2}{2}\)时才会有共振现象。
6.5.3 0、1、2型系统的伯德图
不同型次系统的伯德图的不同之处仅存在于开始时的一段,设型次为\(l\),则开始时的渐近线为
- 如果延长开始时的渐近线与横轴交于\(\omega_c\),则可以在伯德图上得到\(K_o=\omega_c^l\)
- 0型系统的伯德图:开始时是水平的
- 1型系统的伯德图:开始时是-20dB/10倍频
- 2型系统的伯德图:开始时是-40dB/10倍频
往后则都是来一个极点则-20dB/10倍频,来一个零点则+20dB/10倍频。
有了这些特征,如果又能确定所有的转折频率,则闭环传递函数可以通过伯德图直接确定下来。
绘制伯德图的一般步骤
- 将传递函数写成典型环节之积
- 找出各环节的转角频率
- 画出各环节的渐近线
- 如果需要在转角频率处修正渐近线得各环节曲线
- 将各环节曲线相加
6.6.4 最小相位系统和非最小相位系统
前边提到过最小相位系统就是极点全部在闭左半平面中的系统,这是一种表述,但是没能解释它为啥叫这名儿。这里可以介绍另一种表述:最小相位系统相比具有相同幅值的其它系统,其相角的变化范围最小。
6.5.5 从伯德图确定幅值裕度和相位裕度
举个例子就会啦:
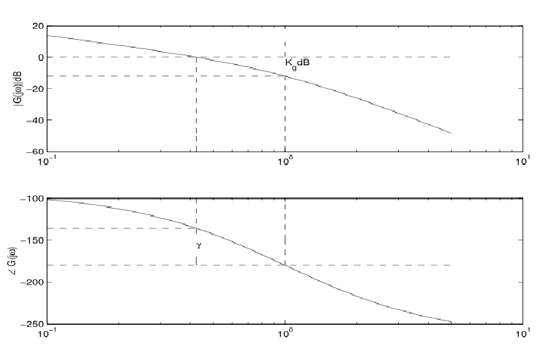
- 从相频特性中找相位交越频率,对应到幅频特性中确定幅值裕度。
- 向下为正,上图中的幅值裕度即为正。
- 从幅值特性中找幅值交越频率,对应到相频特性中确定相位裕度。
- 向上为正,上图中的相位裕度即为正。
6.5.6 伯德图和奈奎斯特曲线的关系
对应关系:
- 奈奎斯特曲线上单位圆对应于\(G_o(s)\)(注意不是\(G(s)\))伯德图上的零分贝线。
- 奈奎斯特曲线上的负实轴对应于\(G_o(s)\)伯德图的\(-180^\circ\)相位线
故在伯德图上可以获得奈奎斯特曲线的\(N\),进而判断系统是否稳定。
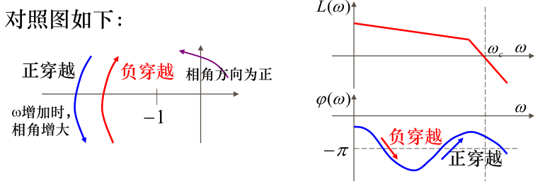
- 注意相频曲线的穿越要发生在幅频曲线在横轴之上时,也即对应到奈奎斯特曲线\((-1,j0)\)点的左侧。
6.6 闭环频率响应
6.4、6.5两小节大部分时候(除了对比伯德图和奈奎斯特图的部分)讨论的都是不带反馈的系统,现讨论的才是带反馈系统的频率响应。
6.6.1 单位反馈系统的闭环频率响应
作出奈奎斯特图如下,则闭环传递函数的分子\(G_o(j\omega)\)和分母\(G_o(j\omega)+1\)都在其中,分别是\(\tilde{OA}\)和\(\tilde{PA}\):
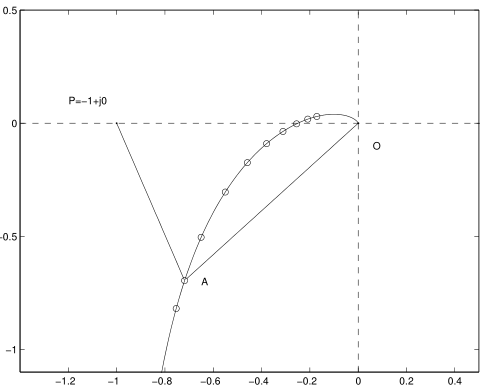
- 将\(\tilde{OA}\)和\(\tilde{PA}\)的幅值相比即可得到闭环幅值响应
- 将\(\tilde{OA}\)和\(\tilde{PA}\)的相位相减即可得到闭环相位响应
6.6.2 频率响应和暂态阶跃响应的关系
对大多数开环传函都有低通的特性,也即是
于是对于闭环传函就有
所以一般会有一个频率能够使得闭环幅值增益为\(1/\sqrt 2\)。当增益小于\(\frac{1}{\sqrt 2}\)时,我们认为增益太小,对输出影响太小,就说到此处截止了,对应的频率即是截止频率\(\omega_b\)。化到分贝数是
- 在从0到截止频率的这一段频带上,各次谐波增益都较大,可以认为属于这些频率的输入是通过系统得到输出了的,这一段频带的长度就称为带宽。
- 带宽越宽,对高频输入的增益就越大,系统响应也就越快(对应上升时间越短),但同时噪音也会增加,这两者有时需要做取舍。
- 截止频率处幅频特性曲线地斜率称为衰减斜率。
- 这个斜率越大,之前所说的“截至”的概念就越准确。但是往往需要做出取舍,因为对于二阶系统来说,越大的衰减斜率就意味着谐振时的增益也越大,对稳定性有损害。
6.6.3 等幅值轨迹和等相位轨迹
本节关心\(G_o(j\omega)\)平面上哪些点能使闭环传函的幅值或相位为某一定值。为了分析讨论,现把\(G_o(j\omega)\)拆成虚实两部分:\(G_o(j\omega)=x+jy\)。
本节没有深入了解,需要时再回来咯
等幅值轨迹(M圆)
是个圆心在实轴上的圆!
等幅位轨迹(N圆)
看看在\(\angle G_o(j\omega)=N=Const\)时轨迹如何:
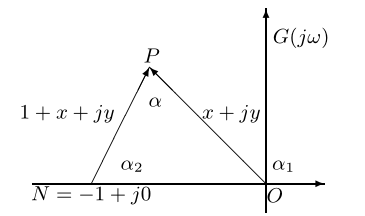
由图知\(\alpha_1-\alpha_2=\alpha\),即
还是个圆(其实是个弧,下半平面没有)!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号