自控理论 第6章 I 奈奎斯特判据
6.1 引入
- 频率响应定义:正弦输入下系统的稳态响应。
6.1.1 LTI系统的频率响应
假设系统稳定(若不稳定可以串入超前补偿器使系统稳定),根据定义,系统输入为
输出为
因为\(G(s)\)稳定,所以后边那些项会随时间衰减至0,稳态响应为
其中\(c\)可以由留数定理确定
带入稳态误差化简得
拉普拉斯逆变换得时域稳态响应
该式说明线性时不变系统对正弦输入的响应是一个频率相同、但幅值和相位变化了的正弦量。
6.1.2 频率响应的图形表示方法一览
- Nyquist图 / Polar Plot
- Bode图 / Logarithmic Plot
- 幅频特性\(|G(j\omega)|\)
- 相频特性\(\angle G(j\omega)\)
- Nichols图(略)
6.2 奈奎斯特稳定判据
6.2.1 辐角原理
\(s\)平面(一个点对应一个\(s\)的复平面)上不通过\(F(s)\)任何零、极点的封闭曲线\(C_S\)包围\(s\)平面上\(F(s)\)的\(Z\)个零点和\(P\)个极点。当\(s\)以顺时针方向沿封闭曲线\(C_S\)移动一周时,在\(F(s)\)平面(一个点对应一个\(F(s)\)的复平面)上映射的封闭曲线\(C_F\)将以顺时针方向绕原点旋转\(N\)圈。\(N\),\(Z\),\(P\)的关系为
6.2.2 奈奎斯特稳定判据
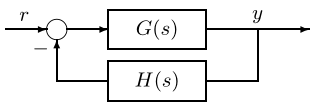
表示闭环传函\(\hat G(s)\)、闭环传函的分母\(D(s)\)、和开环传函\(G_o(s)\)如下
- \(D(s)\)的极点是\(G_o(s)\)的极点
- \(D(s)\)的零点是\(\hat G(s)\)的极点
又根据辐角原理,若在\(s\)平面选取一个包围右半平面的闭合曲线,则对\(D(s)\)运用辐角原理可以得到
故当已知\(G_o(s)\)右半极点数和\(N\)时,便可得到\(\hat G(s)\)右半极点数,进而判断稳定性。
进一步,因为\(D(s)=1+G_o(s)\),可以很容易地使用\(G_o(s)\)代替以上表述中的\(D(s)\)来求取\(N\),因为\(D(s)\)曲线绕原点转过的圈数等于\(G_o(s)\)曲线绕\((-1,j0)\)点转过的圈数。最后得到:
奈奎斯特稳定判据:若系统的开环传递函数在右半平面上有\(P\)个极点,且开环频率特性曲线(\(s\)移动时对应\(G_o(s)\)在复平面上的轨迹)对\((-1, j0)\)点包围的次数为\(N\)(\(N>0\)顺时针,\(N<0\)逆时针),则闭环系统在右半平面的极点数为\(N + P\)。若\(N+P=0\),则闭环系统稳定,否则不稳定。
6.2.3 0、1、2型系统中的奈奎斯特路径
要计算\(\hat G(s)\)右半极点数,需要首先确定\(s\)的闭合曲线,然后还要确定\(s\)的闭合曲线所映射出的\(G_o(s)\)的轨迹及其绕过\((-1,j0)\)点的圈数\(N\)。本节要确定\(s\)的闭合曲线如何取才合适,这个闭合曲线又称作“奈奎斯特路径”。
0型系统
对应虚轴上没有零、极点,虚轴上的任意一点均可在奈奎斯特路径上。
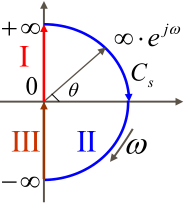
大多数情况下
- 上图中\(\mathrm{II}\)部分映射出的\(G_o(s)\)曲线会因为\(s\to\infty\)而缩成一个点,所以更多关注的是\(\mathrm{I}\)部分和第\(\mathrm{III}\)部分
- \(\mathrm{I}\)部分和\(\mathrm{III}\)部分又共轭,所以只需求出\(0\to\infty\)的\(\mathrm{I}\)部分所映射的\(G_o(s)\)曲线,就可以对称地得到\(\mathrm{III}\)部分所映射的。
因此在接下来得讨论中,更多地是在讨论\(G_o(j\omega)\)而不是\(G_o(s)\)。
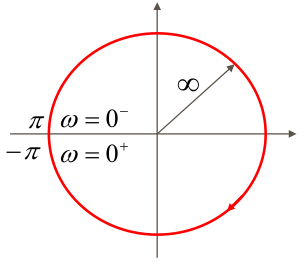
1型系统
此时原点处有\(G_o(s)\)的一重零点。幅角原理要求路径上不能有零极点,故选取下图所示的闭合曲线来满足原理的要求:
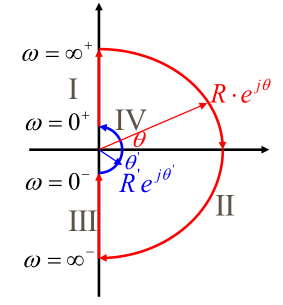
现在讨论上图中新增的蓝色路径在\(G_o(s)\)平面上会映射出什么图形,此时有:
又沿蓝色的\(\mathrm{IV}\)部分,\(\angle G_o(s)\)减小,故对应轨迹为顺时针方向旋转、半径为\(\infty\)的右半圆:
右半圆的是基于开环传函写成\(\frac{K\prod\limits_{i=1}^m(\tau_is+1)}{s\prod\limits_{j=1}^n(T_js+1)}\)的形式而得到的,对于一般的系统要么化为标准形式,要么用同样的方法进行分析。下边的2型系统也是同样的道理。
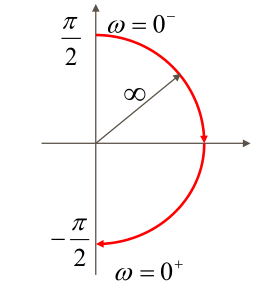
2型系统
此时原点处有\(G_o(s)\)的二重零点。仍可选取1型系统的闭合曲线来满足原理的要求。此时有
又沿蓝色的\(\mathrm{IV}\)部分,\(\angle G_o(s)\)减小,故对应轨迹为顺时针方向旋转、半径为\(\infty\)的整圆:
6.2.4 绘制奈奎斯特曲线并判断稳定性
本节讨论\(s\)的闭合曲线所映射出的\(G_o(j\omega)\)的完整轨迹该如何绘制,进而求得\(N\)并判断系统的稳定性。\(G_o(s)\)的轨迹又称“开环频率特性曲线”。
-
确定\(G_o(s)\)右极点数,根据上一节的内容确定奈奎斯特路径
-
把\(G_o(j\omega)\)分解
- 实部\(P(j\omega)\)
- 虚部\(Q(j\omega)\)
- 幅值\(A(\omega)\)
- 相角\(\varphi(\omega)\)
-
求出几个特征点
- \(G_o(0)\)或者\(\lim\limits_{\omega\to0}G_o(j\omega)\),\(\varphi(0)\)
- \(\lim\limits_{\omega\to \infty}\varphi(j\omega)\)
- \(\left.G_o(j\omega_1)\right|_{P(\omega_1)=0}\)
- \(\left.G_o(j\omega_2)\right|_{Q(\omega_2)=0}\)
-
连接特征点,定性作出\(\omega\)从\(0^+\)变化到\(\infty\)的曲线
-
注意特征点附近的相角,虽然是定性作图但也别差得太离谱
-
确定该段开环频率特性曲线的正穿越次数\(N'^+\)和负穿越次数\(N'^-\)
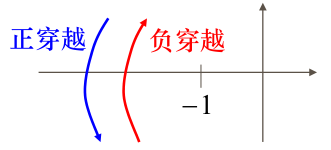
若\(\omega\to0^-\)时曲线刚好落在-1左侧的实轴上,这时要算0.5“次”穿越。
-
计算\(N\)
\[N=2(N'^--N'^+) \]
-
-
判断系统的稳定性
- \(N=0\),系统稳定
- \(N>0\),系统不稳定
- \(N<0\),算错了再检查检查。。。
6.3 几种特殊情况的奈奎斯特判据
不少其实是解题思路哈哈🤦♂️😂
6.3.1 条件稳定系统
对一些系统来说,只有一些系统参数处于一定范围内时它们才是稳定的,通过奈奎斯特判据可以求出能使系统稳定的参数区间。做法也很简单,就是先把参数作为代数画出奈奎斯特曲线,用这些代数表示曲线与实轴的交点,通过调整这些交点处于\((-1,j0)\)点的左侧或右侧即可改变系统的稳定性。
6.3.2 多回路系统
首先应将内环系统视作一个独立的系统,用奈奎斯特判据求取其在右半平面的极点数,然后将内环闭环在右半平面的极点数与其它环节的右半极点数相加,得到原开环系统的右半极点数\(P\),最后再对整体用奈奎斯特判据得到整体的闭环右半极点数。举个例子:
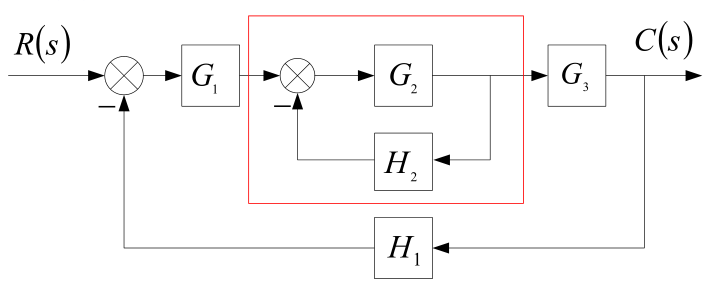
首先把红框中的抽出来,用奈奎斯特判据得到其闭环右半极点数\(P_1\),然后确定\(G_1\)、\(G_3\)、\(H_1\)、的右半极点数分别为\(P_1\)、\(P_3\)、\(P_4\),则原开环系统的右半极点数为\(P=P_1+P_2+P_3+P_4\),化简框图得到原系统的开环传递函数,使用奈奎斯特判据得到原系统的\(N\),则原系统的右半极点数即为\(P+N\)。
6.3.3 需要极点处于特定区域内
这个需要蛮有意义的,比如要求超调量小,则会对\(\zeta\)有要求,即主导极点的相角应小于某个值;再比如要求响应迅速,则会对\(\omega_n\)有要求,也即极点的实部应小于某个值。就拿这两点举例,则此时下图折线的右侧不应有极点:
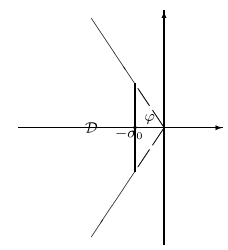
回忆奈奎斯特判据的推导过程,奈奎斯特曲线的左边界是虚轴求出的是在右半平面的极点个数,相应的如果把左边界换成上图的折线即可求出处于折线右端的极点的个数。不过要注意此时求特征点就复杂一些了。
6.3.4 最小相位系统
右半平面无零点和极点的系统称为最小相位系统,即有\(P=0\),故要求\(N=0\)即可保证系统稳定。
-
纯时延的最小相位系统
纯时延的最小相位系统又多了一项\(e^{-T_ds}\),故其与负实轴的交点变为无穷多个,但因为前提是最小相位系统,保证所有交点都在\((-1,j0)\)右侧即可保证系统稳定。
6.3.5 在虚轴除原点以外有开环零点、极点的系统
用无限小半圆路径扣掉极点,对应的开环频率特性曲线需要根据具体情况进行讨论。
6.3.6 根据开环右零点数判断开环右极点数
如果已知开环右零点数和奈奎斯特曲线,是可以直接得到开环右极点数的,举个例子来说明:
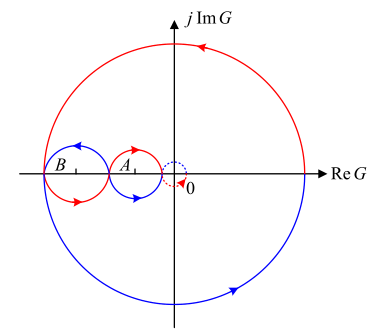
这个图:小蓝色下半圆箭头标反了;虚线当成实线看就好。
假设\(A\)是\((-1,j0)\)点,现在已知\(G_o(s)\)的有零点数为\(Z_0=1\)。奈奎斯特曲线是\(G_o(s)\)的曲线,由辐角原理(注意不是奈奎斯特判据)知道该曲线顺时针(默认奈奎斯特轨迹是顺时针包围右半平面的)绕过原点的圈数\(N_0\)、\(G_o(s)\)的右极点数\(P_0\)、\(G_o(s)\)的右零点数\(Z\)满足\(N_0=Z_0-P_0\),由上图知道\(N_0=-2\),则\(P_0=Z_0-N_0=3\)。
6.3.7 包围左半平面的奈奎斯特路径
相应的用奈奎斯特判据求出的是闭环左极点数,如果闭环左极点数等于系统阶次,那么仍然可以判断系统稳定;反之如果闭环左极点数小于系统阶次,那么说明系统在闭右半平面有极点,系统不稳定。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号