
自控理论 第04章 根轨迹方法
4.1 引入
-
劳斯判据的缺陷
虽然能判断是否稳定,但是不能判断稳定后的各项指标如何,具体来说就是劳斯判据不能反映超调量、上升时间等信息。所以还要继续找新的方法,本章介绍的根轨迹方法就是一种既能判稳,又能反应稳定后的其他指标的方法。
-
定义
-
开环传递函数
不失一般性地,令前向支路传递函数\(G(s)=\frac{N_1(s)}{D_1(s)}\)与反馈支路传递函数\(H(s)=\frac{N_2(s)}{D_2(s)}\),则它们的乘积定义为开环传递函数(return ratio)\(G_o(s)\)。
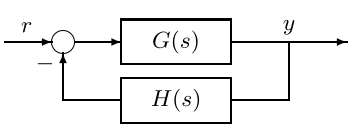 \[G_o(s)=G(s)H(s)=\frac{N_1(s)}{D_1(s)}\cdot\frac{N_2(s)}{D_2(s)}=\frac{K(s-z_1)(s-z_2)\cdots(s-z_m)}{(s-p_1)(s-p_2)\cdots(s-p_n)}=\frac{KN_o(s)}{D_o(s)} \]
\[G_o(s)=G(s)H(s)=\frac{N_1(s)}{D_1(s)}\cdot\frac{N_2(s)}{D_2(s)}=\frac{K(s-z_1)(s-z_2)\cdots(s-z_m)}{(s-p_1)(s-p_2)\cdots(s-p_n)}=\frac{KN_o(s)}{D_o(s)} \]- 此处的开环传递函数和上一章的开环传递函数其实是同一个东西,只不过上一章中都是单位反馈\(H(s)=1\),所以就有\(G_o(s)=G(s)H(s)=G(s)\)了。
- 以上述的形式表示开环传递函数,则\(K\)称为根轨迹增益。
-
特征方程
\[D(s)=N_1(s)N_2(s)+D_1(s)D_2(s)=D_o(s)+KN_o(s) \]
-
4.3 构建根轨迹的规则
与其说是规则不如说是规律,不过ppt上用的rule,老师也说的规则,就按规则来吧。。
根轨迹的定义
随着\(K\)从0增大到\(\infty\),特征方程\(D_o(s)+KN_o(s)=0\)的根,也即原闭环传递函数的极点在复平面上的运动轨迹称为根轨迹。为了方便后边的分析,一般还都写为下列定义式中\(\frac{N_{\mathrm{o}}(s)}{D_{\mathrm{o}}(s)}=-\frac{1}{K}\)的形式
注意:虽然下边一直在拿\(G_o(s)\)讨论,但根轨迹不是\(G_o(s)\)极点的轨迹,而是原来的闭环传递函数极点的轨迹。
-
相角条件:由定义有\(G_o(s)=-1\quad s\in\mathcal{RL}(D_o,N_o)\),故根轨迹上的点满足
\[\angle G_o(s)=(2k+1)\pi,s\in\mathcal{RL}(D_o,N_o) \] -
幅值条件:由定义易知
\[K=\left|\frac{D_o(s)}{N_o(s)}\right| \]
规则0:实系统的根轨迹总是关于实轴对称
因为复数根总是共轭的,所以它们的轨迹也会关于是轴对称。
规则1:根轨迹分支的个数等于开环传递函数\(G_o(s)\)的阶次
这里假设\(D_o(s)\)和\(N_o(s)\)已经没有公因式了。则根据\(n\)此方程有\(n\)个根的定理,易得此规则。
规则2:根轨迹起点和终点的规律
\(K\to0\)时,\(G_o(s)=\frac{N_o(s)}{D_o(s)}\to\infty\),故根轨迹起始于开环传递函数的极点;
\(K\to\infty\)时,\(G_o(s)=\frac{N_o(s)}{D_o(s)}\to0\),故根轨迹终止于开环传递函数的零点。
- 注意无穷远也可能是零点。
规则3:实轴上根轨迹的规律
实轴上一点右边的零/级点个数(重根算多个)若为奇数,则该点在根轨迹上,反之则不在。
-
证明:
\(s\)在实轴上时,有
\[\frac{N_o(s)}{D_o(s)}=\frac{K(s-z_1)(s-z_2)\cdots(s-z_m)}{(s-p_1)(s-p_2)\cdots(s-p_n)}<0 \]对于共轭的极点或零点\(s_1,s_2\),总有\(|s-s_1||s-s_2|=|s-\sigma-j\omega||s-\sigma+j\omega|=(s-\sigma)^2+\omega^2>0\),所以它们不会使得开环传函为负。继续考虑实数的零点和极点\(s_0\),如果\((s-s_0)<0\),有\(s<s_0\),即该点\(s_0\)会在这段根轨迹的右边。再稍微扩展一下就得到了该条规则。
规则4:\(s\to \infty\)时根轨迹渐近线的规律
推导翻书,太长不抄啦。思路:将\(\frac{D_o}{N_o}\)展开为\(s\)的多项式,省略\(s\to\infty\)时的二阶小量,然后再泰勒展开一次,计算稍微多一点,建议背下来咯。
故渐近线与x轴的截距和夹角为
规则5:分离点、汇合点的规律
-
定义
- 分离点:实轴上相邻两极点之间的根轨迹在该点脱离实轴。
- 汇合点:实轴上相邻两零点之间的根轨迹在该点到达实轴。
-
特点:分离点、汇合点是开环增益\(K=-\frac{D_o(s)}{N_o(s)}\)沿实轴变化时的极值点。举个例子,根轨迹终止于实轴上两个相邻的零点,则在两条根轨迹从汇合点出发然后终止于两零点的过程中,\(K\)一直增大,故汇合点处的\(K\)就是这两个零点之间的极小值。
- 分离点是极大值点。
- 汇合点是极小值点。
-
计算:此时的极点\(s\)满足\(\frac{\mathrm d}{\mathrm d s}\frac{D_o(s)}{N_o(s)}=0\),既满足
\[D_o'(s)N_o(s)-N_o'(s)D_o(s)=0 \]- 要注意该方程的解只是驻点(stationary point,即一阶导数为0的店),而驻点不一定是极值点。严格来说要检查高阶导数以排除非极值点的情况,但一般遇不到。。。
规则6:根轨迹出射角、入射角的计算
由相角条件有
让\(s\)趋近极点和零点可以得到以下结论(非重根的结论是易得到的,至于重根为什么是除一个\(n\)得到的,课上没有解释)
-
出射角:下标d指departure,即离开极点;\(n_l\)是指这个极点是\(n_l\)重极点。
\[\theta_{d,l}=\frac{1}{n_l}\left[(2k+1)\pi+\sum\limits^m_{i}\angle(p_l-z_i)-\sum\limits^n_{j\ne l}\angle(p_l-p_j)\right] \] -
入射角:下标a指approach,即趋近零点;\(n_h\)是指这个极点是\(n_h\)重零点。
\[\theta_{a,h}=\frac{1}{n_h}\left[(2k+1)\pi-\sum\limits^m_{i\ne h}\angle(z_h-z_i)+\sum\limits^n_{j}\angle(z_h-p_j)\right] \]
规则7:虚轴穿越点、临界稳定根轨迹增益的计算
假设根轨迹在\((0,j\omega)\)穿越虚轴,且此时的增益为\(K_{cr}\)(cr指critical,此时系统临界稳定),则满足
将\(N_o(j\omega)\)、\(D_o(j\omega)\)用\(a+jb\)的形式表示,则可以得到一个关于\(K_{cr}\)和\(\omega\)的方程组,解该方程组即可得到它俩。
规则8:根轨迹在实轴上的交点的规律
规则5是规则8的特例,规则5描述的是两条根轨迹在实轴上相交的规律,规则8描述的则是\(r\)条根轨迹在复平面上任意一点相交的规律。
假设\(r\)条根轨迹相交于\(s_0\),则此时有(用的不多,证明翻书吧)
故求解上述方程,然后将解带入\(\frac{D_o(s)}{N_o(s)}\)验证是否为负实数即可得到根轨迹的交点。
- 同时\(s_0\)还是特征方程的\(r\)重根,由根轨迹的定义可以的到这个表述。
- 分离点和汇合点只涉及到了根轨迹在实轴上的相交,但此处得到的交点可能在复平面上的任意一点。
规则9:\(n-m\ge2\)时,闭环极点的和等于开环极点的和
假设开环极点为\(r_i\ i\in[1,n]\),则有
当\(n-m>2\)时通过上式求\(s^{n-1}\)的系数即可得到该规则。
- \(K\)增大时,闭环极点会变化,但开环极点不会变化。该规则说明了当\(n-m>2\)时,虽然闭环极点会随着\(K\)增大而变化,但它们的总和不会变,所以如果有一条根轨迹随着\(K\)增大而向左走,则为了极点之和不变就一定会有一条根轨迹向右走,这条根轨迹在\(K\)较大时则很有可能导致系统不在稳定。
规则10:这10条规则不能唯一确定根轨迹
只是一些规律嘛,这是当然的。现在毕竟有Python有MatLab,学这个很大一部分原因应该只是应付考试中的手绘根轨迹题目了。
手绘步骤
- 求出开环传函
- 求出开环传函的零、极点
- 确定实轴上的根轨迹
- 求出分离点、汇合点
- 求出出射角和入射角
- 求出穿越点、临界稳定根轨迹增益
- 求出渐近线
- 定性手绘
4.4 特殊的根轨迹
4.4.1 其他系统参数的根轨迹(广义根轨迹)
先写出特征方程,然后把它调整成以下形式
其中\(\theta_i\)是关心的系统参数,则就又可以用上一节中的方法画根轨迹啦。
4.4.2 正反馈系统的根轨迹(零度根轨迹)
形成正反馈既可能由综合点的符号导致,也可能由反馈通路传递函数\(H(s)\)系数的符号导致,确定到底是不是正反馈系统,稳妥的方法是看特征方程写成什么样:
其中
如果取正号则是负反馈,规则按普通的根轨迹来;反之则是零度根轨迹,所有普通根轨迹中涉及\((2k+1)\pi\)的地方都得改为\(2k\pi\)。
-
相角条件
\[\angle G_o(s)=2k\pi,s\in\mathcal{RL}(D_o,N_o) \] -
规则3
实轴上一点右边的零/级点个数(重根算多个)若为偶数,则该点在根轨迹上,反之则不在。
-
规则4
\[s-\frac{\sum\limits_{j=1}^np_j-\sum\limits_{i=1}^mz_i}{n-m}\approx K^{\frac{1}{n-m}}e^{j\frac{2k\pi}{n-m}} \] -
规则6
-
出射角:下标d指departure,即离开极点;\(n_l\)是指这个极点是\(n_l\)重极点。
\[\theta_{d,l}=\frac{1}{n_l}\left[2k\pi+\sum\limits^m_{i}\angle(p_l-z_i)-\sum\limits^n_{j\ne l}\angle(p_l-p_j)\right] \] -
入射角:下标a指approach,即趋近零点;\(n_h\)是指这个极点是\(n_h\)重零点。
\[\theta_{a,h}=\frac{1}{n_h}\left[2k\pi-\sum\limits^m_{i\ne h}\angle(z_h-z_i)+\sum\limits^n_{j}\angle(z_h-p_j)\right] \]
-

 浙公网安备 33010602011771号
浙公网安备 33010602011771号