
自控元件 第4章 交流异步电机-1
明天考这门课,这个笔记的质量可想而知😢。没那么忙了就继续完善它!
概述
-
电机分类
- 异步指的转速会随负载大小而改变,同步电机的转速则会与交流电源保持一致。
-
交流异步电动机的特点
- 优点:结构简单,重量轻;价格便宜;运行可靠;维修方便。
- 缺点:不能大范围的平滑调速;会从电网吸取滞后的励磁电流,使电网的功率因数变坏。
注意本章不像上一章讨论电动机和发电机都讨论了,本章讨论的只有电动机。
4.1 交流异步电动机的结构和磁场
4.1.1 结构
定子
- 组成:定子铁心、定子绕组、轴承以及其它固定装置。
- 接法:分接成(电压要除)和接成。
转子
- 组成:组成:转子铁心、转子绕组、轴承以及其它固定装置。
- 分类
- 笼型:结构简单,应用广泛。
- 绕线型:结构复杂,可接入额外的控制装置(?),用于特殊场合。
4.1.2 磁场
参数
-
相绕组:这里的“绕组”貌似和之前说的一个磁极上绕的一个绕组(线圈)不一样,感觉指的是输入的交流电的相数,常见的就是单相和三相。这里的一个相绕组可以有多个极对。
-
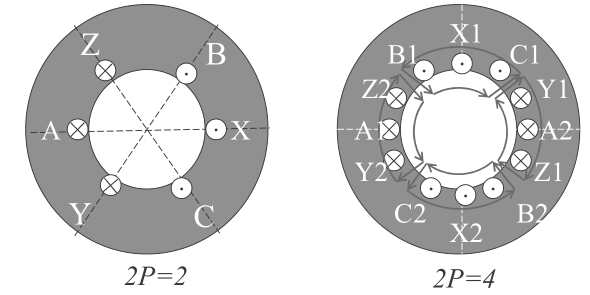
极对数:一个绕组具有的N、S磁极的对数。
- 有时候还会说极数,比如六极、四极什么的,这个要除以2才能得到极对数。
-
极距:相邻磁极沿电枢间隔的弧长,有。
-
机械角度:圆周上两个元素与圆心的连线所形成的锐角或平角。
-
电角度:机械角度与极对数的积,即
使用电角度的方便之处可以在下边举的例子中体会一下~
-
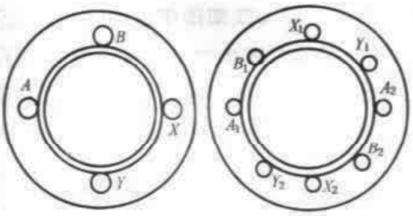
定子绕组的位置
-
相邻绕组之间的电角度:电信号的相位差
-
对于两相交流电机,两相绕组差电角度
两相相位差为,这样一个正弦一个余弦可以叠加出一个旋转矢量。
-
对于三相交流电机,两相绕组差电角度
这样也可以叠加出旋转矢量。
-
-
同一绕组的相邻极对之间的电角度:
-
同一极对的一对导体之间的电角度:
-
举例说明一下
-
使用电角度计算两相交流电机的机械角度
相邻绕组间的机械角度 同一绕组的相邻极对间的机械角度 同一极对的一对导体间的机械角度 -
使用电角度计算三相交流电机的机械角度
相邻绕组间的电角度 同一绕组的相邻极对间的电角度 同一极对的一对导体间的电角度
磁场
-
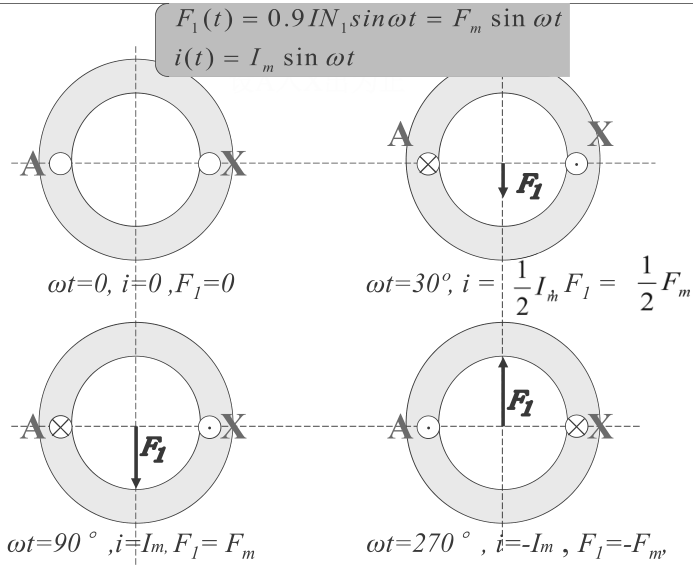
单相绕组的磁场
根据环路定理,则在任意某一时刻,因为气隙长度均匀,气隙磁势是一个沿圆周变化的方波,边沿出现在导体处(原因见下图)。取沿电枢表面圆周坐标的原点在绕组轴线的一端,做傅里叶级数展开后,可以得到
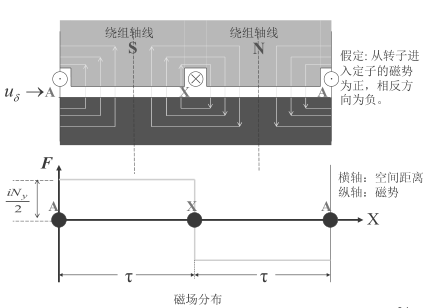
- 这个磁势也称为“脉振磁势”。
- 从哪里来的:极对不同会产生不同周期的方波,具体为,对不同周期的方波做傅里叶级数展开就会得到。
-
三相绕组的磁场
-
空间矢量图:建立一个正弦磁动势与空间矢量的映射关系
回忆一下电力电子SVPWM以套用结论:
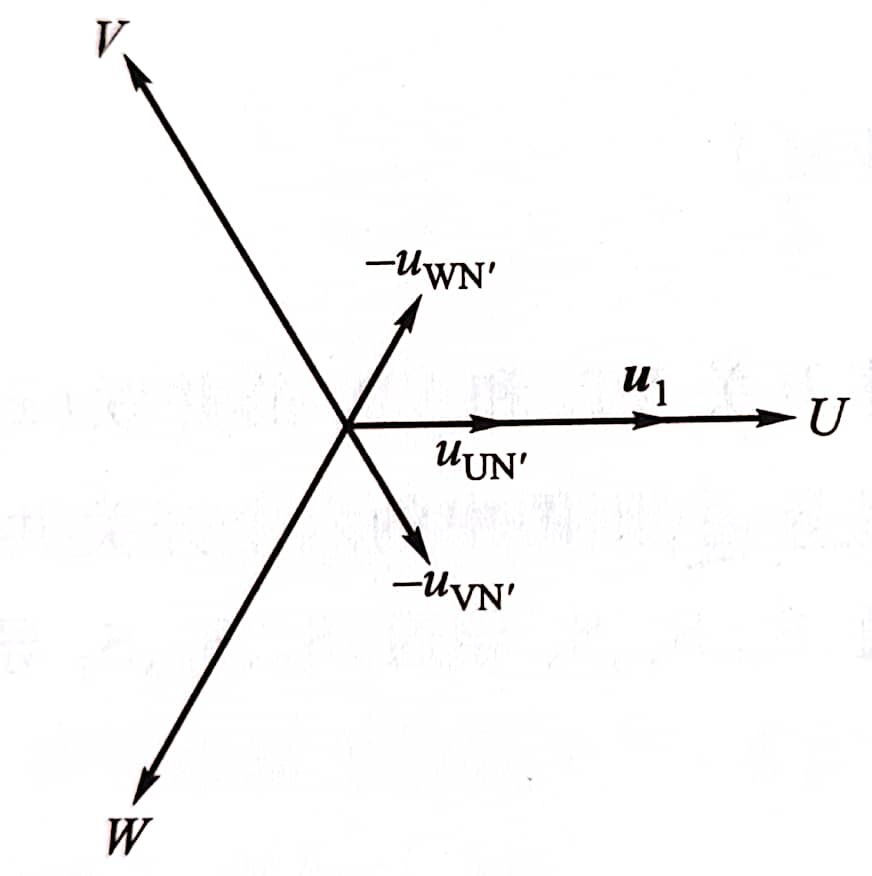
如果把三相正弦输出的瞬时值相对时间的变化一维图像间隔120度的画在平面上,并把它们映射为该平面上的向量,则有以下关系(为方便计算而使用复数代替了向量)
现在拿到的是
把空间矢量图中的对应的矢量用复数表示就是
空间矢量示意图如下,图示是的情形:
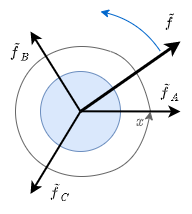
- 三者的相位关系:A超前B,B超前C,C因为正弦信号的周期性质又超前A。
类比一下电力电子的结果,此处合成之后的结果也就应该是
用矢量表示则这是一个旋转矢量,换回关于沿圆轴坐标的表示可以得到
这是一个沿圆周(轴正方向,也称“从超前相转向滞后相”)传递的正弦行波,对应空间矢量的转速,也称为同步转速,为(标准单位)
- 约定使用下标1表示定子的物理量,下标2表示转子的物理量。
- 所谓正弦行波就是一个随着时间而沿空间轴平移的正弦波
按照习惯,取单位,则单位的转速在数值上满足
我个人非常讨厌这种计算不带单位然后最后强行加系数修正的方法,然而书上就这么做。
-
4.2 三相交流异步电动机
标题是三相的,但是内容很多事异步电动机通用的。
4.2.1 转差率与工作状态
-
定义转差率:其中为同步转速,为实际转速
容易得到
-
由转差率判断工作状态(其实要到4.2节最后才差不多把这件事解释清楚)
转差率 转速 工作状态 发电机 电动机 电磁制动
4.2.2 转子静止时的物理关系
注意:以下讨论中用的是幅值,因为后边使用频率折合的时候不好讨论相位。因为频率不一,折合后结果的相位信息也就没有什么意义了。
首先得把转子也分为a、b、c三相来看,转子静止时,其中的感应电势和转子同频滤,定子和转子中的感应电势幅值分别为
- :同时穿过定子磁极和转子铁心的磁通的幅值。
- :考虑到绕组分布在圆周上而引入的修正系数。
则此时相当于是三个变压器,定子相当于一次绕组,转子相当于是二次绕组,折合系数为
4.2.3 转子旋转时的物理关系
转子中感应电势、电流的频率
旋转磁场转速为,转子转速为,二者旋转方向形同。换到相对转子静止的参考系下,则旋转磁场的转速为,旋转磁场在转子中产生的感应电势和电流的频率即为
涉及对电磁物理量更换参考系,感觉有点心虚。。。
感应电流又会产生旋转磁场,其转速为
即与当前参考系下定子产生的旋转磁场相同,说明转子产生的旋转磁场与定子产生的旋转磁场同步。
等效电路
符号约定:旋转转子折合前各实际物理量均加下标s,折合后的物理量只加下标1或2表示分别事定子或转子的量。
频率折合
因为旋转后转子中的感应电势、电流的频率都变为了,不能直接当作原来的变压器做了,需要先做一点点转换。不过好在感应电动势、感抗和频率成正比,且已知,故可以很容易地把自变量换成:
故有以下折合关系
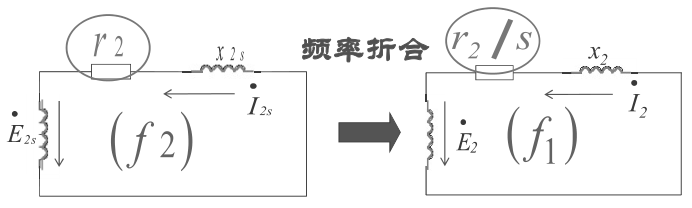
所以总结来说的话,除了转子绕组电阻需要除以转差率之外,其它不用怎么变。
绕组折合
使用变比
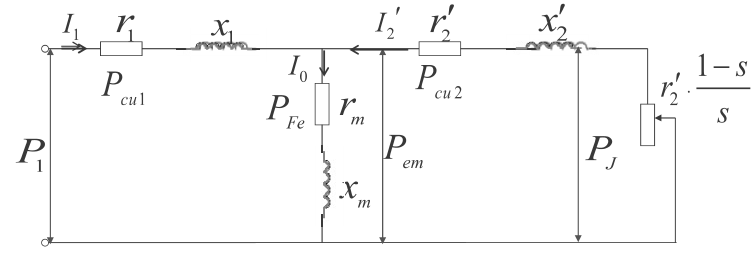
结果
频率折合、绕组折合都用上,有
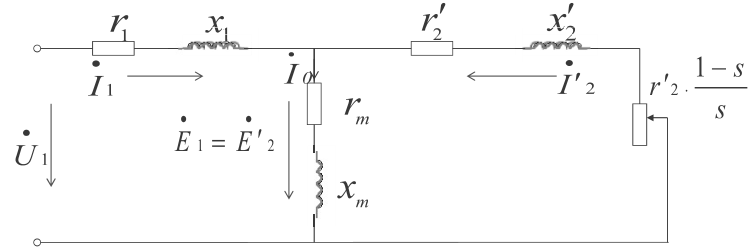
注意此处等效电路电流方向和之前整理变压器时的不一样,但其实影响不大,应为电压和阻抗都是确定的,算出来无非改一下符号。
- :定子漏抗和折合后的转子漏抗。
- :定子绕组电阻和折合后的转子绕组电阻。
- :定子铁心损耗等效的电阻。
- :定子绕组电感。
时以上等效电路与转子不动时的等效电路相同,可以推测上消耗的功率与转动时的机械功率相等。
我感觉ppt得出这个结论实在太草率了,就说了个“根据能量守恒原理”。。。
4.3 三相交流异步电动机的功率和转矩
4.3.1 功率关系
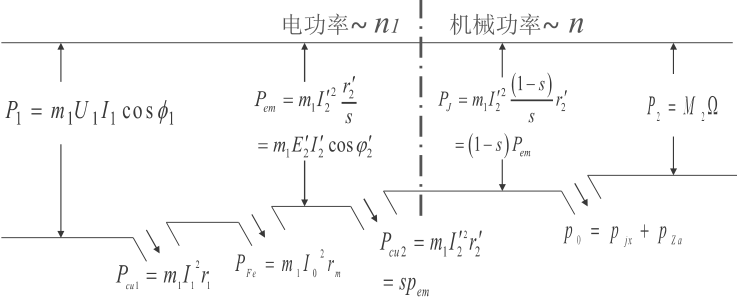
-
有关系
-
因为转子磁通变化频率较低,其造成的铁心损耗(转子的)一般不计。
4.3.2 电磁转矩和机械特性
-
转矩与功率
-
电磁转矩计算
-
机械特性:指曲线
根据等效电路可以(暴力)求得
其中
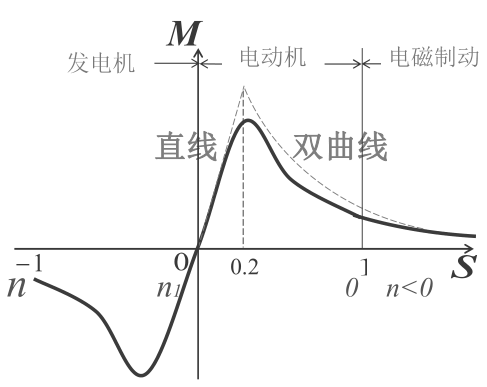
- 过载能力:最大转矩与额定转矩之比。
- 空载转速:理想条件(无摩擦等损耗)下,空载时转子可以以同步转速旋转,即,此时对应。实际中因为存在空载转矩,空载转速仍会小于,即在的某处。
- 起动(堵转)转矩:即时的转矩。为了让电机启动更迅速,可以通过增大转子回路电阻的方法来增大起动转矩。
- 上图中一段是稳定工作区,该段进行进行调速输出功率较为稳定(个人理解的“稳定”)。
4.4 三相交流异步电动机的使用
-
启动
- 直接启动
- 优点:简单
- 缺点:电流过大
- 降压启动:先低压启动,再逐渐升压。
- 优点:电流小
- 缺点:启动转矩小
- 绕线式转子:启动时调大转子串联的电阻。
- 直接启动
-
反转
改变任意两相的相序即可
-
制动
- 反接制动:即反转,减速到0时立刻切断电源。
- 能耗制动:以直流电代替交流电,通过产生的恒定磁场制动。
-
调速
- 同步转速不变,而改变转差率
- 改变极对数
- 改变定子励磁电压
- 改变绕线式转子的电阻
- 在转子中增加一个与转子电势同频率而相位相反的电势
- 转差率不变,而改变同步转速
- 改变电源频率
- 同步转速不变,而改变转差率
-
额定值
- 额定电压:额定状态下定子绕组上所加的线电压。
本文作者:Harold_Lu
本文链接:https://www.cnblogs.com/harold-lu/p/15686057.html
版权声明:本作品采用知识共享署名-非商业性使用-禁止演绎 2.5 中国大陆许可协议进行许可。



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步