
基于PI控制器的车辆行驶控制系统simulink建模与仿真
1.课题概述
基于PI控制器的车辆行驶控制系统是一种常见的控制策略,它利用比例-积分(Proportional-Integral, PI)控制器来调整车辆的速度或方向以达到期望值。在本课题中,我们将完成基于PI控制器的车辆行驶控制系统simulink建模与仿真。通过PI控制器分别对车辆形式的角度和车速进行控制仿真。
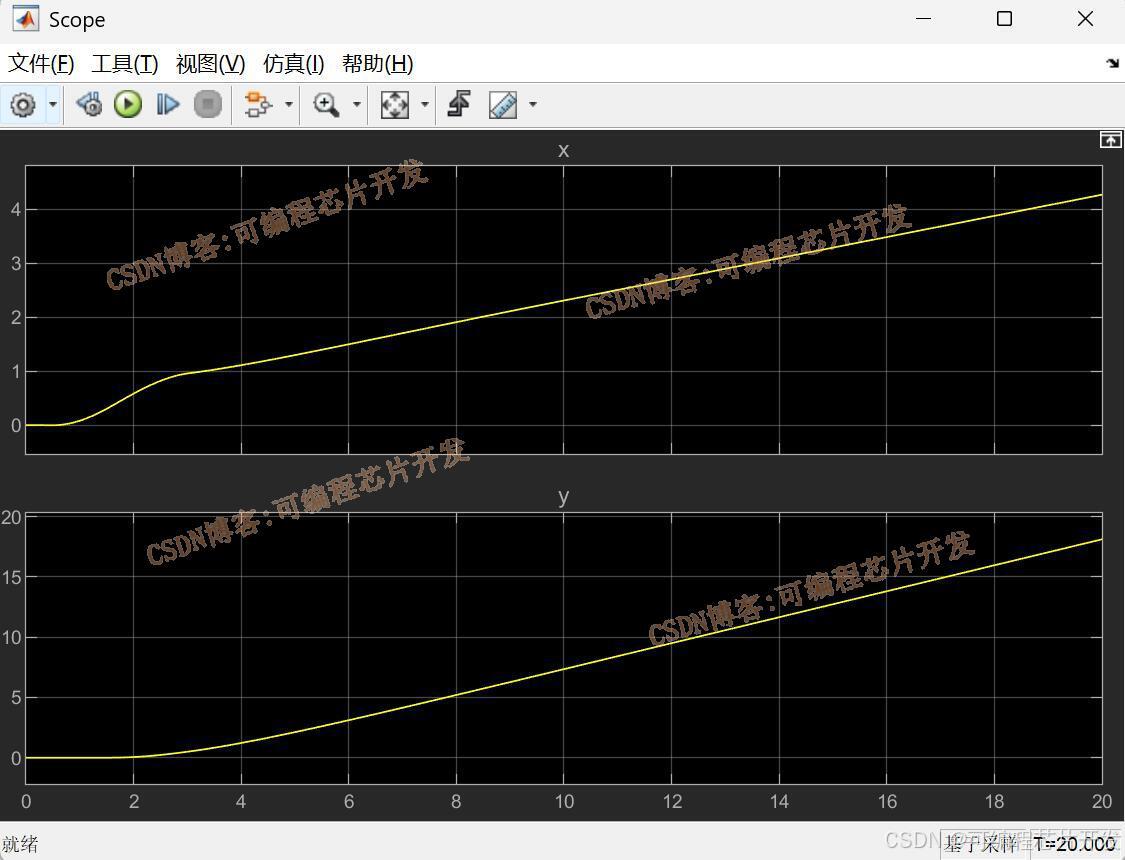
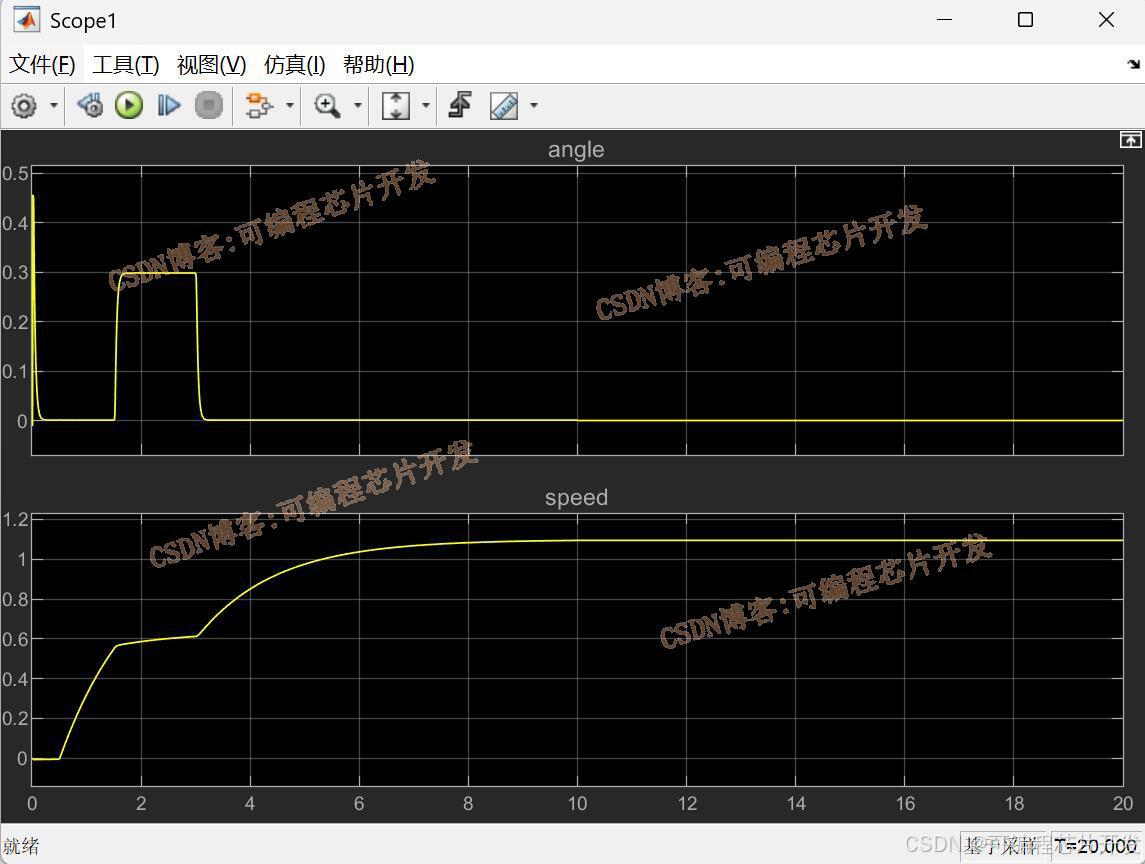
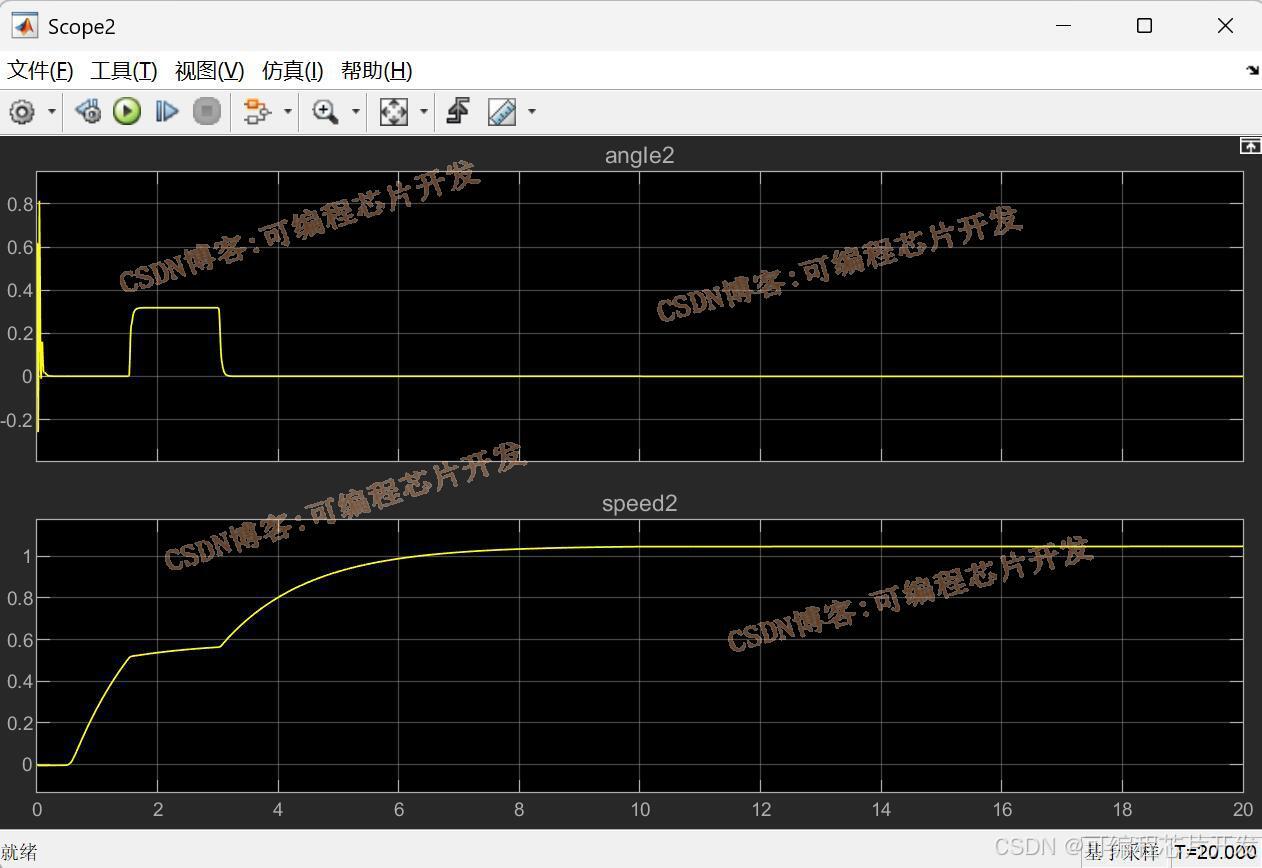
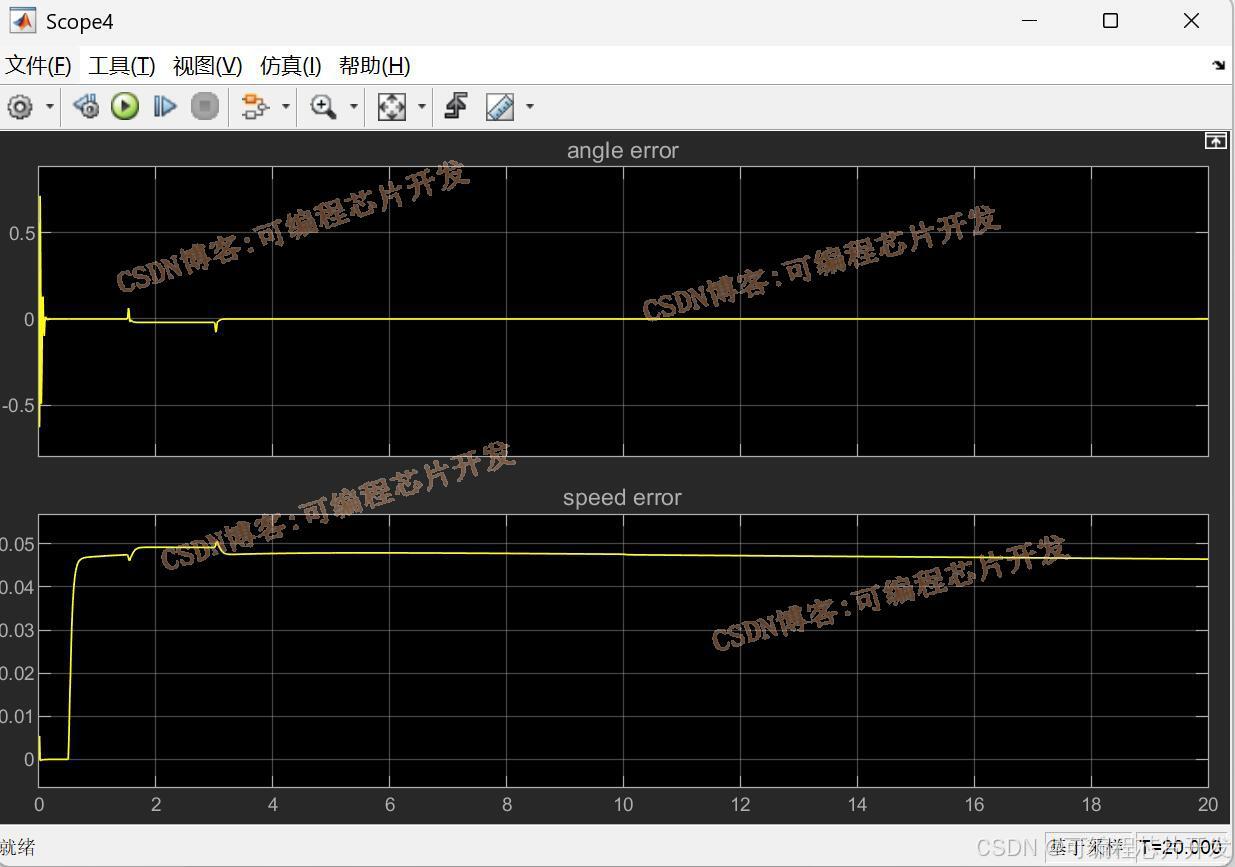
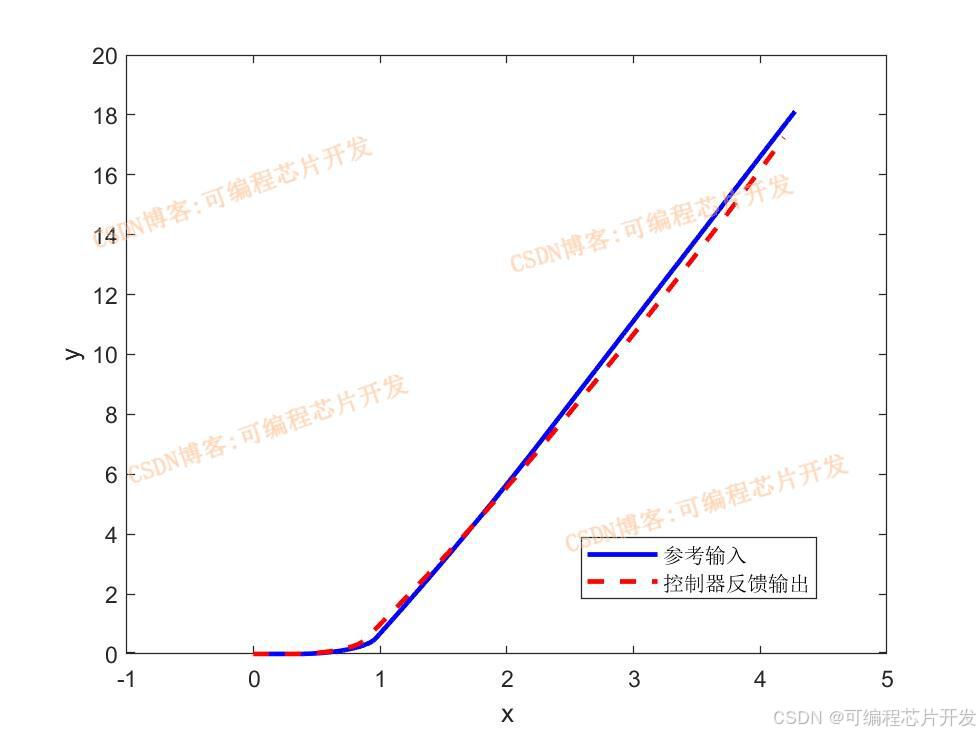
2.系统仿真结果
(完整程序运行后无水印)
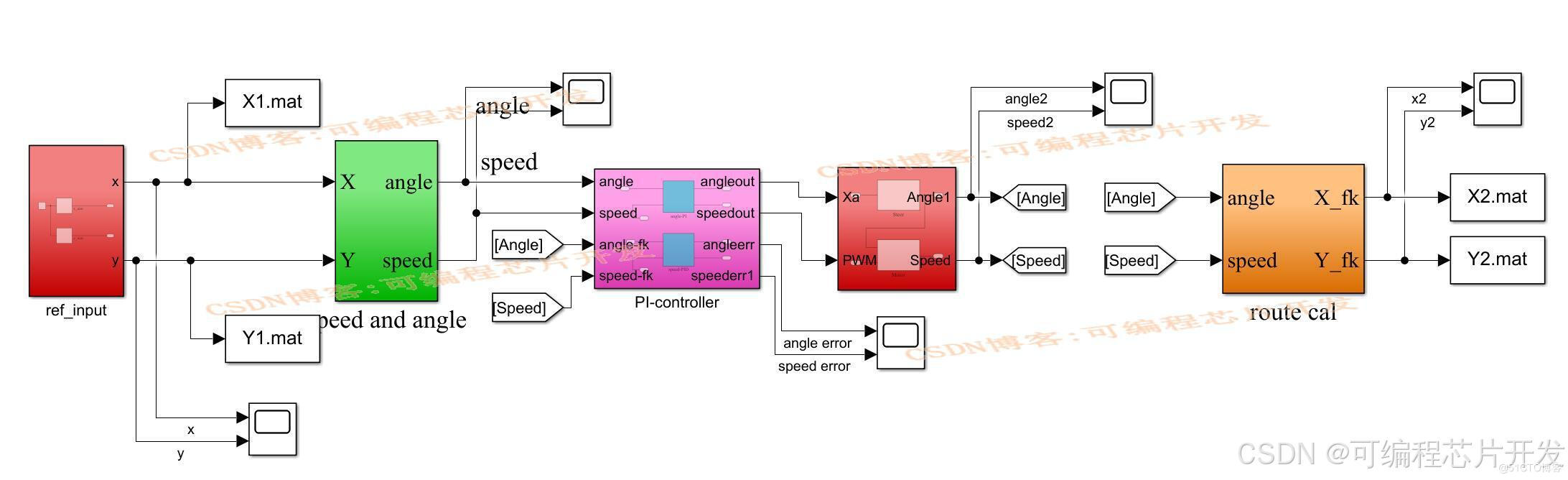
3.核心程序与模型
版本:MATLAB2022a
4.系统原理简介
PI控制器是PID控制器的一种简化形式,其中“P”代表比例,“I”代表积分。这类控制器通过当前误差和过去一段时间内误差累积的效果来决定如何调节系统输入,从而使得系统的输出能够尽可能接近设定的目标值。
比例项:根据当前时刻的误差大小立即做出反应,提供即时的校正作用。
积分项:考虑了历史上的误差积累情况,主要用于消除稳态误差,即当系统趋于稳定时仍存在的偏差。
4.1 步骤一: 确定目标与测量
首先需要明确想要控制的具体参数是什么(例如速度),并确定一个理想的目标值r(t)。同时,也需要有办法实时获取实际值y(t),这通常是通过传感器完成的。
目标函数:r(t)
实际输出:y(t)
4.2 步骤二: 计算误差
在每一步计算中,都需要计算出当前的实际值与目标值之间的差异,也就是误差e(t)。
误差定义:e(t)=r(t)−y(t)
4.3 步骤三: 设计PI控制器
设计PI控制器意味着选择合适的比例增益Kp和积分时间常数Ti 。这些参数的选择对于控制器性能至关重要,并且通常需要经过试验调优才能得到最佳效果。

4.4 步骤四: 应用控制信号
将由PI控制器生成的控制信号u(t)应用到执行机构上,比如发动机油门或转向系统等,以此来改变车辆的状态直至达到预定目标。
执行动作:依据u(t)调整相应物理量
4.5 步骤五: 反馈循环
这是一个闭环控制系统,因此在实施了控制之后,会再次回到第一步重新测量当前状态,并重复整个过程直到满足停止条件为止。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号