基于PID控制器的车辆控制系统simulink建模与仿真
1.课题概述
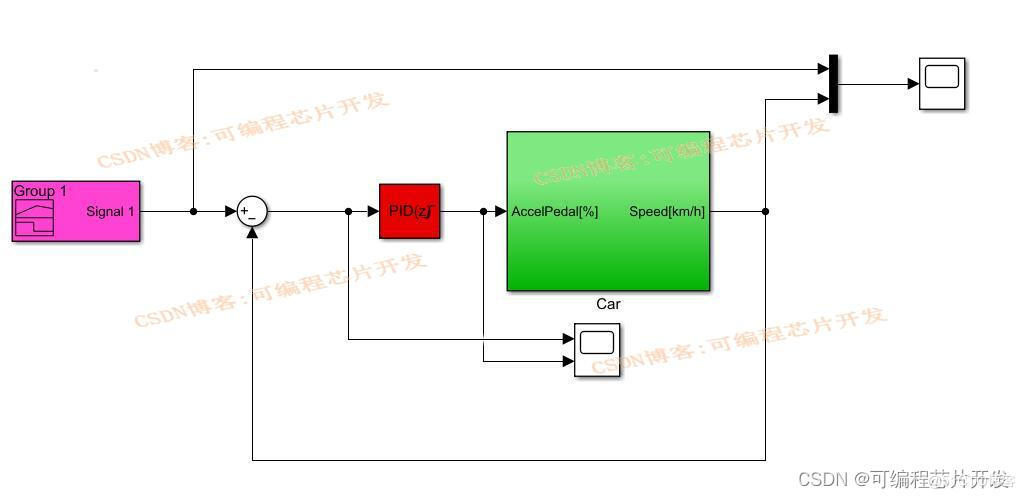
基于PID控制器的车辆控制系统simulink建模与仿真,包括PID控制器和车辆模型。
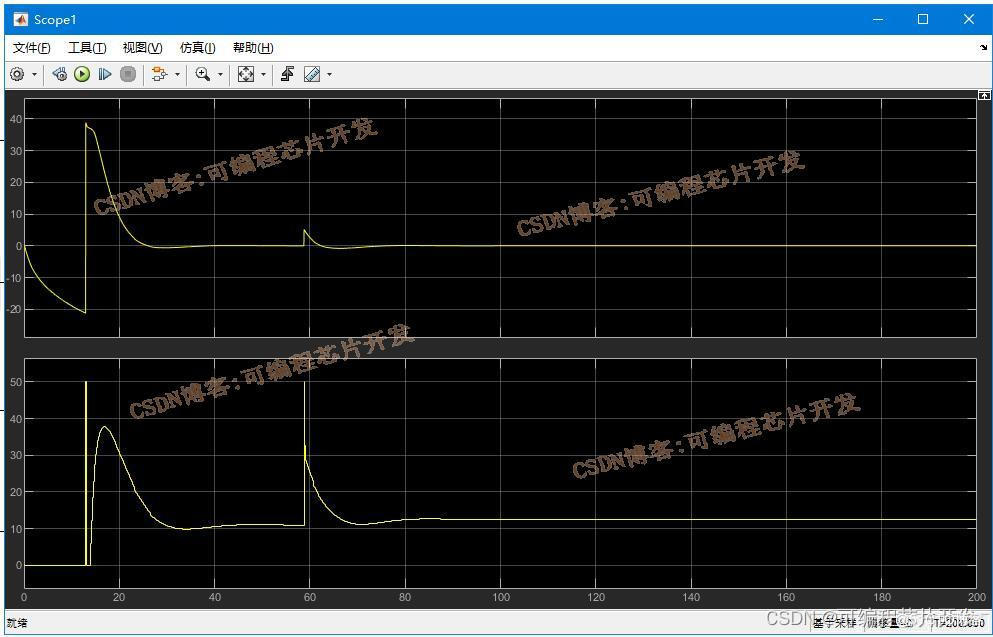
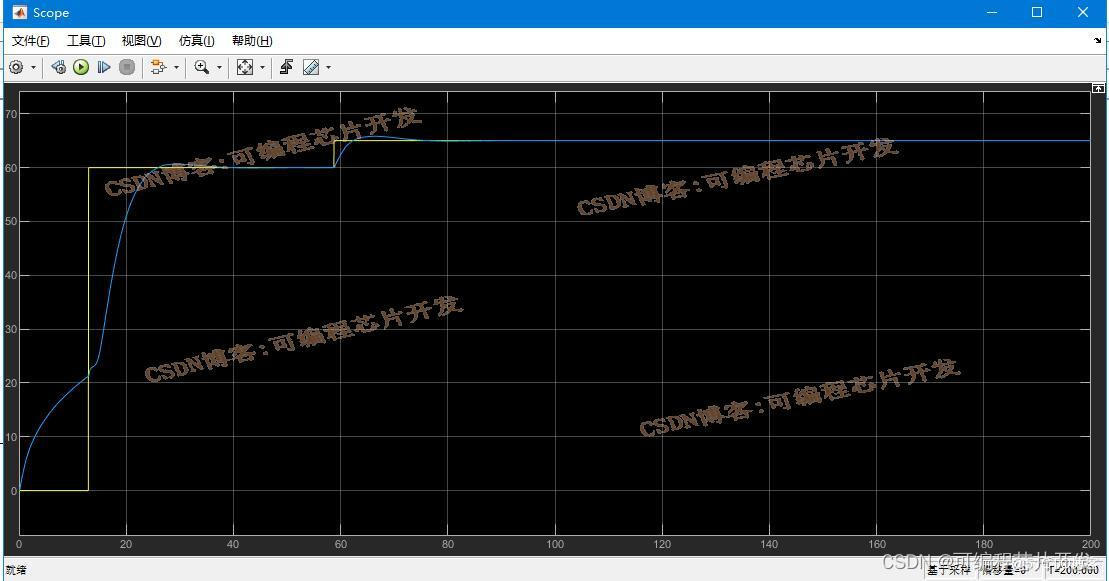
2.系统仿真结果
(完整程序运行后无水印)
3.核心程序与模型
版本:MATLAB2022a
4.系统原理简介
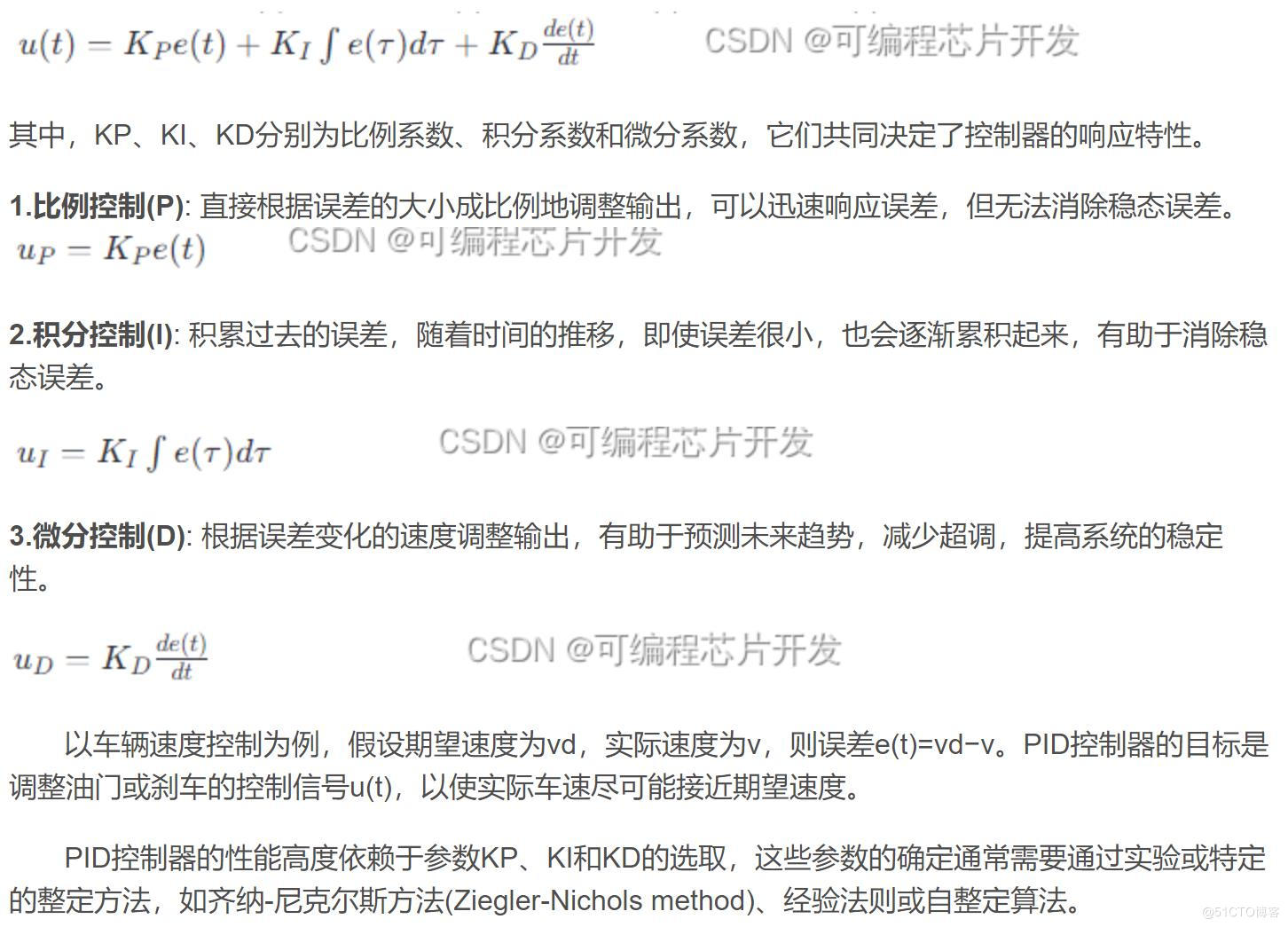
PID控制器(比例-积分-微分控制器)是一种广泛应用在控制理论与工程实践中的闭环控制策略,特别是在车辆控制系统中,它被用来维持期望的性能指标,如车速控制、方向稳定、悬架调整等。PID控制器通过实时计算误差并根据误差的比例(P)、积分(I)和微分(D)分量来调整控制输入,从而有效地纠正偏差,实现系统的稳定运行。
PID控制器的输出u(t)是误差信号e(t)即期望值r(t)与实际输出y(t)之差的函数,可以表示为:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号