基于PID控制器的天线方位角位置控制系统simulink建模与仿真
1.课题概述
基于PID控制器的天线方位角位置控制系统simulink建模与仿真。通过零极点配置的方式实现PID控制器的参数整定。
2.系统仿真结果
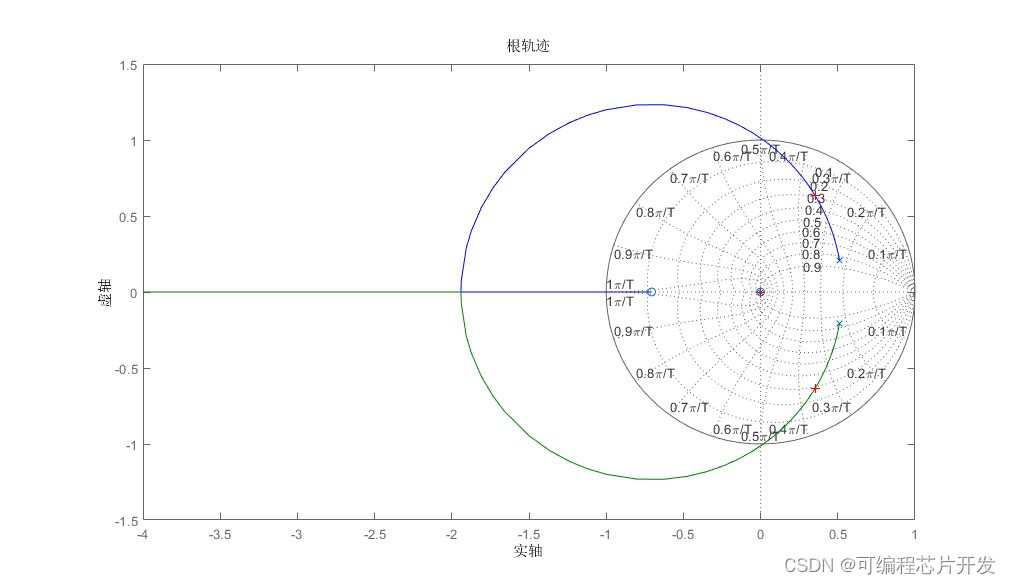

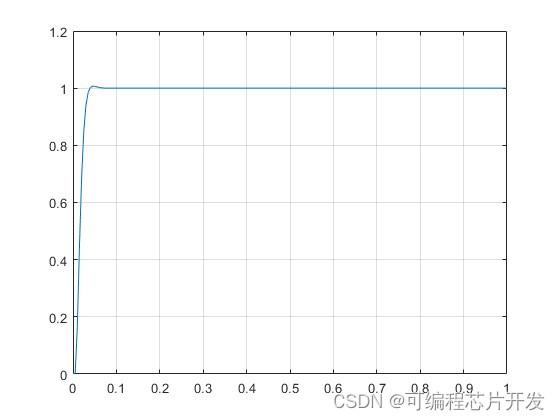
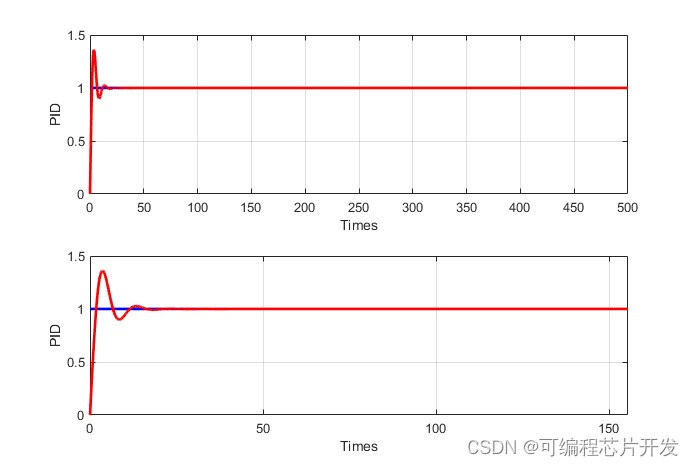

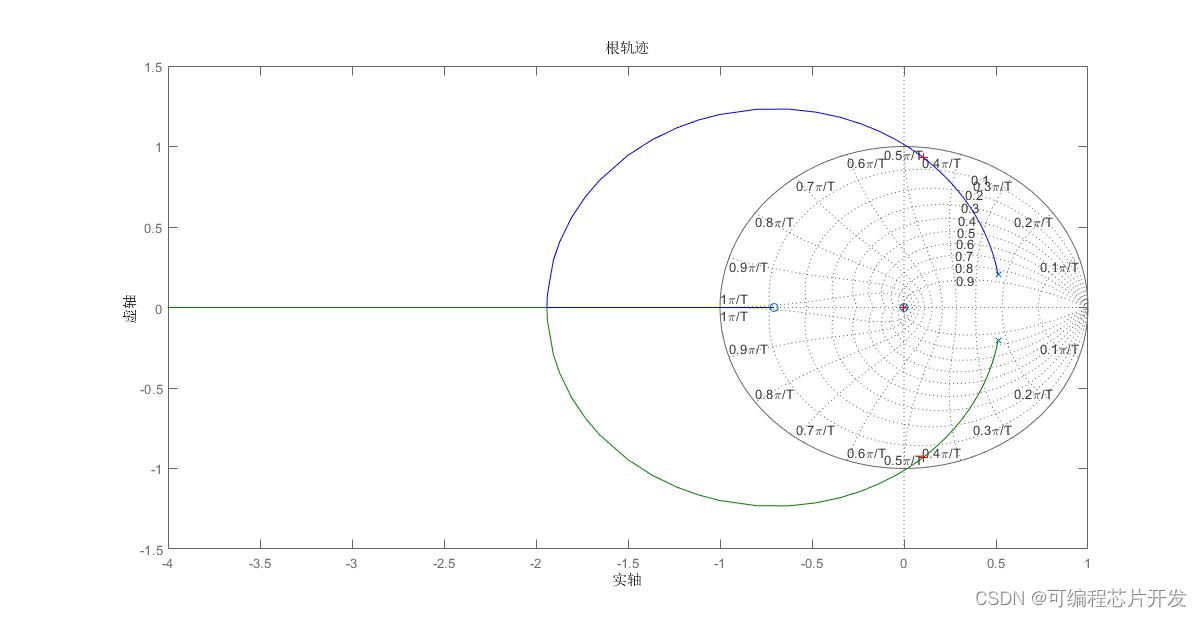

3.核心程序与模型
版本:MATLAB2022a
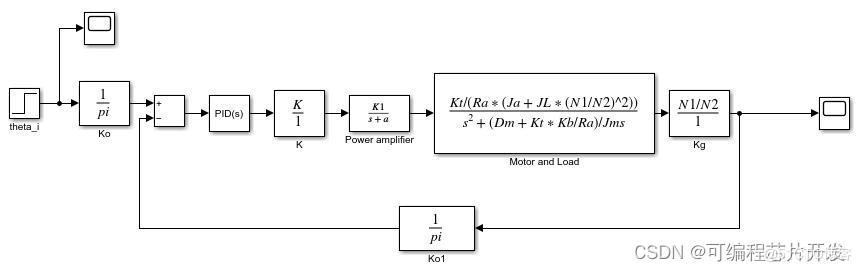
4.系统原理简介
天线方位角位置控制系统是无线通信、雷达跟踪、卫星接收等领域中不可或缺的一部分,其核心任务是确保天线能够迅速而精确地指向所需的方向,以捕获最佳信号。PID(比例-积分-微分)控制器,作为经典且广泛应用的控制理论基石,被广泛应用于此类系统中,以实现对天线方位角的精确控制。天线方位角控制系统主要包括天线驱动装置、角度传感器(如编码器)、控制器(PID控制器)和执行机构(电机驱动电路)。系统的工作目标是通过比较期望的方位角与实际测量的方位角,计算出控制信号,驱动电机调整天线位置,使得实际方位角快速而准确地跟踪设定值。
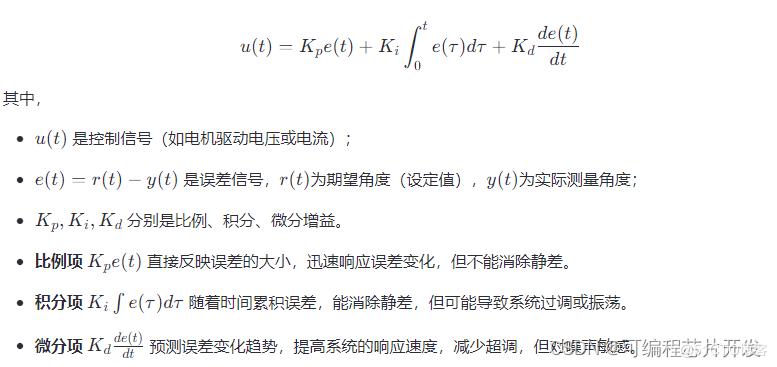
PID控制器基于比例(P)、积分(I)、微分(D)三个基本控制环节的线性组合,其控制规律如下:
天线方位角控制系统可抽象为一阶惯性环节加纯延迟模型,其传递函数为:
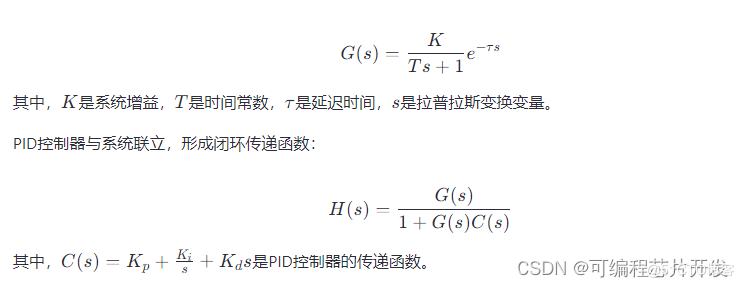
基于PID控制器的天线方位角位置控制系统,通过比例、积分、微分三个环节的综合调节,实现了对天线方位角的快速、精确控制。系统设计和参数整定需综合考虑响应速度、稳定性、准确性与鲁棒性等因素,以适应不同的应用场景和环境变化。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号