
基于模糊PID控制器的的无刷直流电机速度控制simulink建模与仿真
1.课题概述
基于模糊PID控制器的的无刷直流电机速度控制simulink建模与仿真。基于模糊PID控制器的无刷直流电机(Brushless Direct Current Motor, BLDCM)速度控制系统是一种融合了传统PID控制与模糊逻辑控制优势的智能控制策略,旨在提高BLDCM速度控制的动态响应、抗干扰能力和稳态精度。
2.系统仿真结果
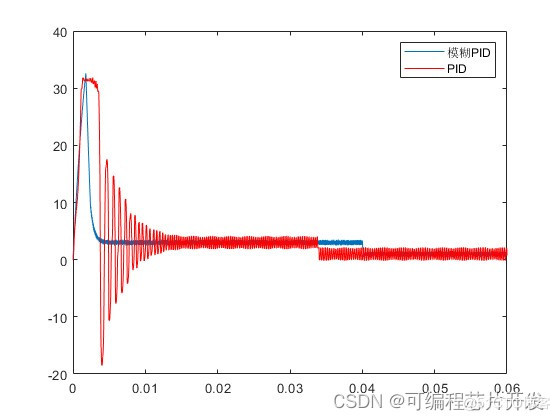
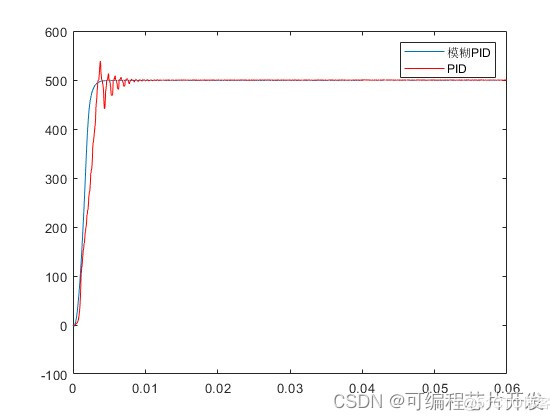
3.核心程序与模型
版本:MATLAB2022a
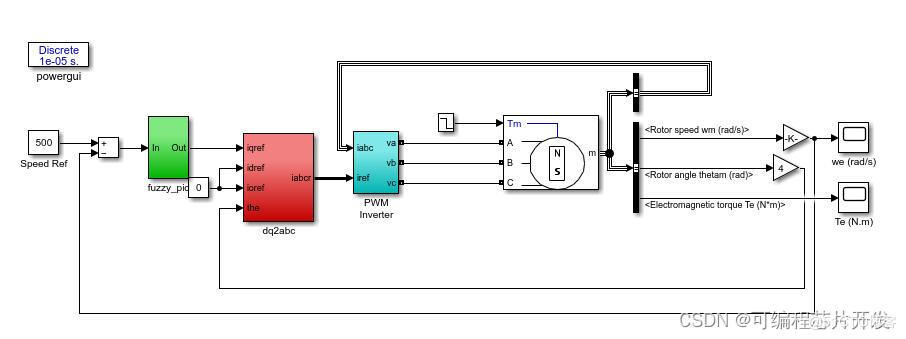
4.系统原理简介
4.1无刷直流电机模型与速度控制
无刷直流电机由定子绕组、永磁转子和电子换相器组成。其数学模型可简化为:
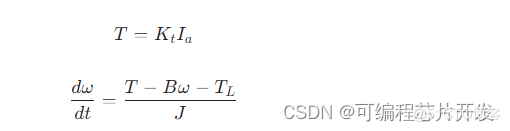
其中,T 为电机电磁转矩,Kt 为扭矩系数,Ia 为定子相电流,ω 为电机角速度,B 为电机摩擦系数,TL 为负载转矩,J 为转动惯量。速度控制的目标是通过调节定子相电流 Ia 来实现电机转速 ω 的精确跟踪。
4.2 模糊PID控制器设计
模糊PID控制器结合了PID控制的稳定性、易整定性和模糊逻辑控制的非线性适应性、语言描述优势,其结构通常包含模糊化、模糊推理、解模糊三个环节。
模糊化:将PID控制器的误差 e=r−ω (设定转速 r 与实际转速 ω 之差)和误差变化率 e˙=dtde 作为输入,通过隶属函数将其转化为模糊语言变量(如“负大”、“负中”、“负小”、“零”、“正小”、“正中”、“正大”)。
模糊推理:依据预先设计的模糊控制规则库,对模糊化后的误差和误差变化率进行模糊推理,得出PID参数(比例系数 Kp、积分系数 Ki、微分系数 Kd)的模糊输出。
例如,典型模糊控制规则如下:
IF (Error is NB AND Derivative is NB) THEN (P is PB, I is NB, D is ZE)
...
IF (Error is ZE AND Derivative is PB) THEN (P is PM, I is ZE, D is PB)
其中,NB、NM、ZE、PS、PM、PB分别代表“负大”、“负中”、“零”、“正小”、“正中”、“正大”。
解模糊:将模糊输出通过中心平均法、重心法、最大隶属度法等解模糊算法转化为具体的PID参数值,用于后续的PID控制计算。
基于模糊PID控制器的无刷直流电机速度控制系统巧妙地结合了PID控制与模糊逻辑控制的优点,通过模糊化、模糊推理、解模糊等步骤动态调整PID参数,实现对电机转速的精确、稳定控制。这种系统具有良好的动态响应、抗干扰能力和稳态精度,适用于各种工况下的BLDCM速度控制应用。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号