
六自由度Stewart控制系统matlab仿真,带GUI界面
1.课题概述
六自由度Stewart平台控制系统是一种高精度、高稳定性的运动模拟装置,广泛应用于飞行模拟、汽车驾驶模拟、虚拟现实、精密定位等领域。其工作原理基于Stewart机构(也称为并联机构)的设计理念,通过六个独立的线性致动器(通常为液压缸或电动推杆)连接固定基座与移动平台,实现对平台上负载在三维空间内六个自由度(三维平移X、Y、Z和三维旋转-roll、pitch、yaw)的精确控制。
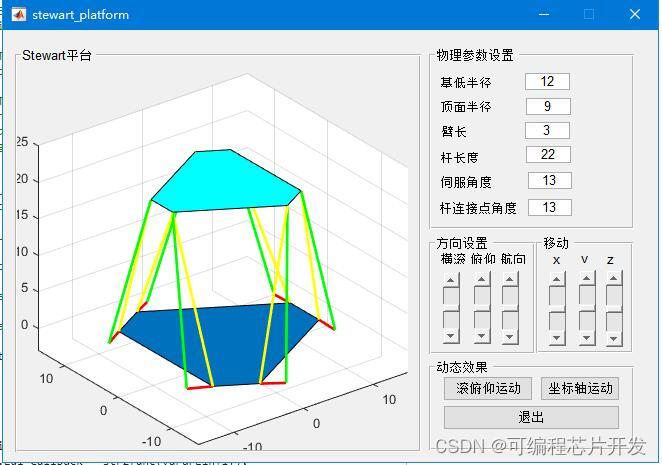
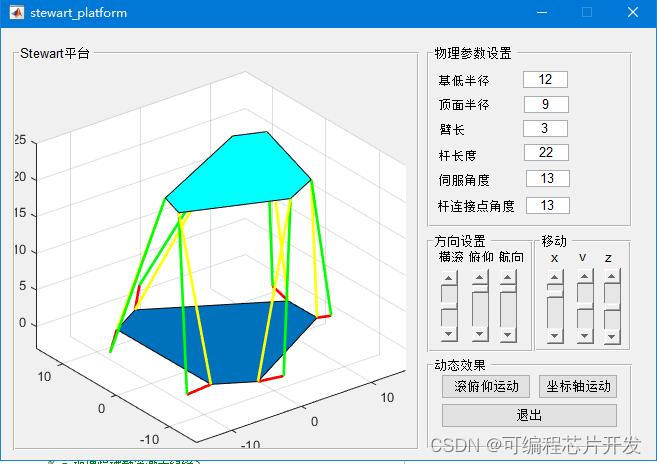
2.系统仿真结果
3.核心程序与模型
版本:MATLAB2022a
function x_slider_Callback(hObject, eventdata, handles) max_x= 4; % x min_x= -4; % x slide= get(hObject,'Value'); handles.x= slide * (max_x - min_x) +min_x; x_pos = num2str(handles.x); handles.trans(1)= handles.x; guidata(hObject, handles); stewart_cal(handles); % --- Executes during object creation, after setting all properties. function x_slider_CreateFcn(hObject, eventdata, handles) if isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor')) set(hObject,'BackgroundColor',[.9 .9 .9]); end max_x= 4; % x ? min_x= -4; % x ? slide= get(hObject,'Value'); handles.x= slide * (max_x - min_x) +min_x; handles.trans(1)= handles.x; guidata(hObject, handles) function y_slider_Callback(hObject, eventdata, handles) max_y = 4; % y ? min_y = -4; % y ? slide= get(hObject,'Value'); handles.y= slide * (max_y - min_y) + min_y; y_pos= num2str(handles.y); handles.trans(2)= handles.y; guidata(hObject, handles); stewart_cal(handles); function y_slider_CreateFcn(hObject, eventdata, handles) if isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor')) set(hObject,'BackgroundColor',[.9 .9 .9]); end max_y = 4; % y min_y = -4; % y slide= get(hObject,'Value'); handles.y= slide * (max_y - min_y) + min_y; handles.trans(2)= handles.y; guidata(hObject, handles); function z_slider_Callback(hObject, eventdata, handles) max_z = 4; % z min_z = -4; % z slide= get(hObject,'Value'); handles.z= slide * (max_z - min_z) + min_z; z_pos= num2str(handles.z); handles.trans(3)= handles.z;% guidata(hObject, handles); stewart_cal(handles); 44
4.系统原理简介
Stewart平台由固定基座、移动平台、六个线性致动器(记为A、B、C、D、E、F)以及相应的球铰链组成。每个致动器由两段连杆构成,一段固定在基座上,另一段通过球铰链与移动平台相连。致动器内部安装有位移传感器和伺服驱动装置,可以精确控制连杆长度。致动器与平台连接点形成一个顶点,六个顶点共同定义了移动平台的几何中心。设平台几何中心为O,六个顶点分别为P_i(i=1,2,3,4,5,6),对应致动器长度为l_i。则Stewart平台的几何构造可描述如下:
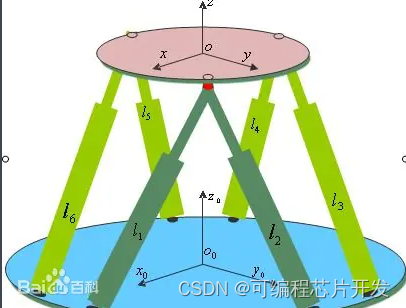
平台运动学建模的核心是建立平台位姿(位置和姿态)与六个致动器长度之间的关系。这里采用齐次坐标系表示平台位姿,设平台当前位姿为T=[R|t],其中R为旋转矩阵,t为平移向量。对于任意一个顶点P_i,其在基座坐标系和平台坐标系下的位置分别为P_{ib}和P_{ip}。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号