
小车侧方位停车过程的动态模拟matlab仿真
1.课题概述
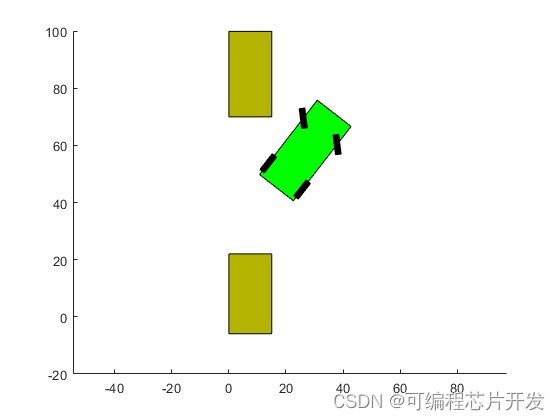
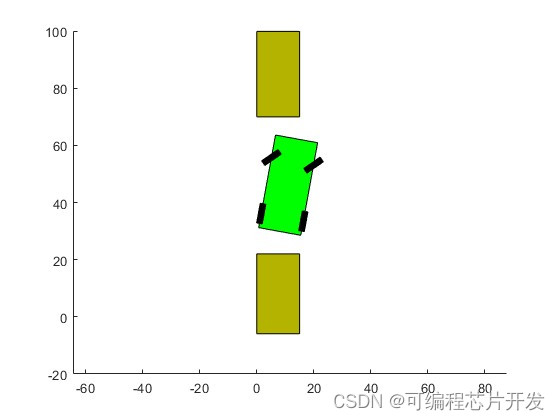
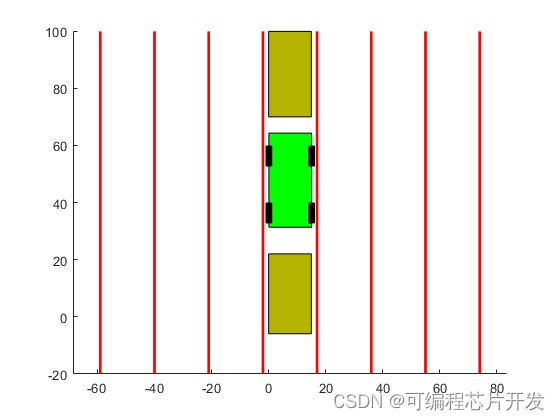
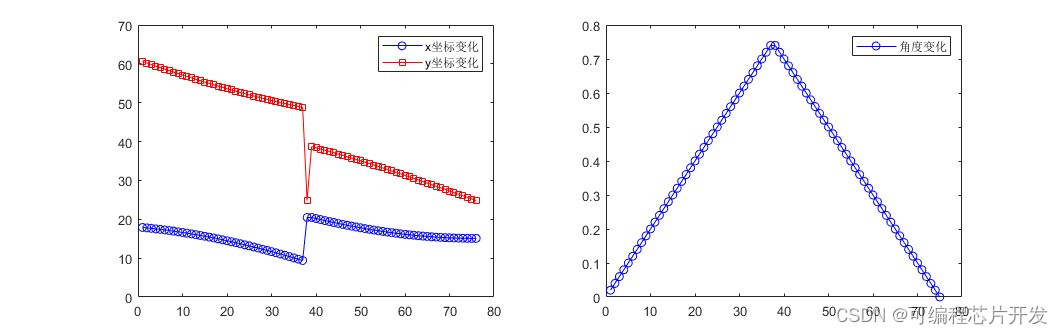
小车侧方位停车过程的动态模拟matlab仿真。仿真得到小车的停车动画,小车移动的xy轴坐标以及角度变换。
2.系统仿真结果
3.核心程序与模型
版本:MATLAB2022a
%阶段3
%车轮
pause(1);
for i=1:13
ya1=ya1+0.5;
yb1=yb1+0.5;
ya2=ya2+0.5;
yb2=yb2+0.5;
cla;
patch([Car2pos_x1 Car2pos_x2 Car2pos_x3 Car2pos_x4],[Car2pos_y1 Car2pos_y2 Car2pos_y3 Car2pos_y4],[0.7 0.7 0]);
patch([Car1pos_x1 Car1pos_x2 Car1pos_x3 Car1pos_x4],[Car1pos_y1 Car1pos_y2 Car1pos_y3 Car1pos_y4],[0.7 0.7 0]);
patch([xa1 xb1 xb2 xa2],[ya1 yb1 yb2 ya2],[0 1 0]);
ya11=ya1+(D-WLen/2);
yb11=ya11+WLen;
ya21=ya2+(D-WLen/2);
yb21=ya21+WLen;
xa11=xa2+(Wkd/2);
xb11=xa2+(Wkd/2);
xa21=xa2-(Wkd/2);
xb21=xa2-(Wkd/2);
patch([xa11 xb11 xb21 xa21],[ya11 yb11 yb21 ya21],[0 0 0]);
xa22=xa1-(Wkd/2);
xb22=xa1-(Wkd/2);
xa12=xa1+(Wkd/2);
xb12=xa1+(Wkd/2);
patch([xa12 xb12 xb22 xa22],[ya11 yb11 yb21 ya21],[0 0 0]);
ya13=ya11+Hcar;
yb13=yb11+Hcar;
patch([xa11 xb11 xb21 xa21],[ya13 yb13 yb13 ya13],[0 0 0]);
patch([xa12 xb12 xb22 xa22],[ya13 yb13 yb13 ya13],[0 0 0]);
pause(.02);
end
hold on
plot(-59*ones(1,121),[-20:100],'r','linewidth',2);
hold on
plot(-40*ones(1,121),[-20:100],'r','linewidth',2);
hold on
plot(-21*ones(1,121),[-20:100],'r','linewidth',2);
hold on
plot(-2*ones(1,121),[-20:100],'r','linewidth',2);
hold on
plot(17*ones(1,121),[-20:100],'r','linewidth',2);
hold on
plot(36*ones(1,121),[-20:100],'r','linewidth',2);
hold on
plot(55*ones(1,121),[-20:100],'r','linewidth',2);
hold on
plot(74*ones(1,121),[-20:100],'r','linewidth',2);
hold on
figure;
subplot(121);
plot(Xset,'b-o')
hold on
plot(Yset,'r-s')
legend('x坐标变化','y坐标变化');
subplot(122);
plot(thetas,'b-o')
legend('角度变化');
38
4.系统原理简介
假设小车是一个刚体,其侧方位停车过程中涉及到以下几个关键状态变量:
位置坐标:小车前端中心点在水平面上的坐标(x, y)。
角度:小车与垂直方向之间的夹角θ。
速度:小车向前和向侧面的线速度(vx, vy)。
角速度:小车转向的角度速度ω。
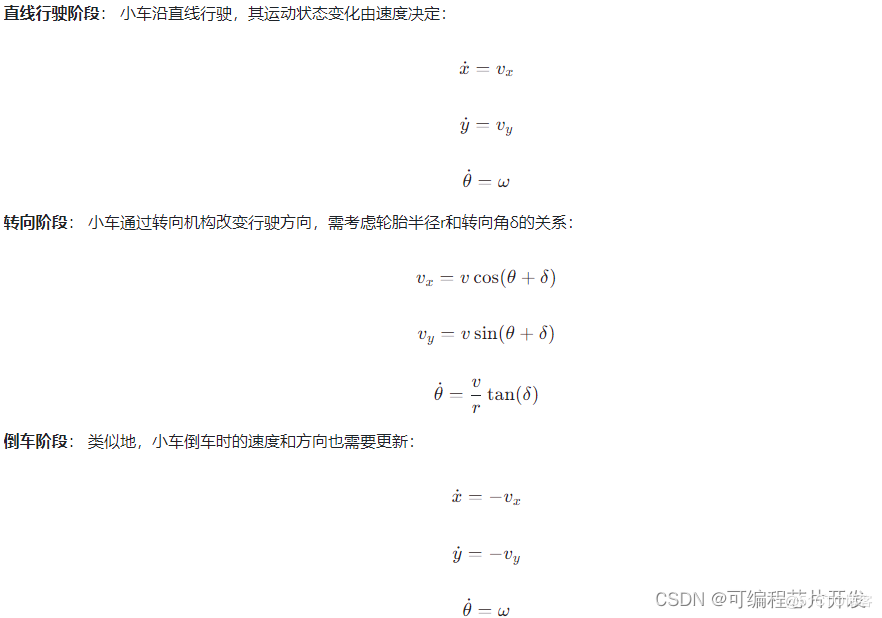
侧方位停车的过程可以拆分为直线行驶、转向、倒车和微调等阶段,对于每一个阶段,可以分别建立相应的运动学方程:
结合上述运动学模型和控制策略,构建小车侧方位停车的动态模拟流程,包括:
设定初始条件(小车位置、速度、目标车位位置等)。
设计和实现控制器,根据当前状态计算下一步的控制输入(驱动力矩、转向角等)。
更新小车的运动状态(位置、速度、角度)。
检查是否达到停车条件(如与车位边界点的距离是否小于阈值),未达到则重复步骤2和3,直至成功停车。
这样的模拟有助于验证控制策略的有效性,优化停车算法,并在实际应用前对停车过程进行预判和调试。在实际编程实现时,可以利用Matlab工具搭建仿真模型,并可视化整个停车过程。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号