基于simulink的双摆运动系统建模与仿真
1.课题概述
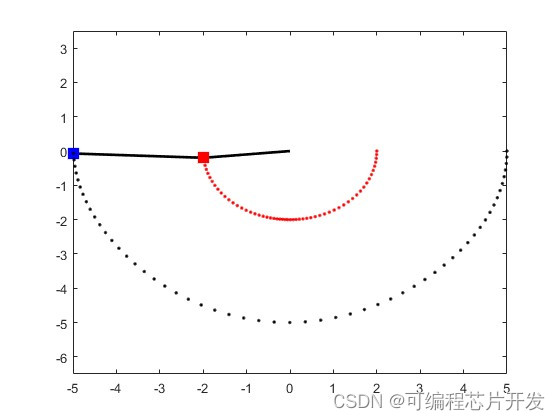
基于simulink的双摆运动系统建模与仿真.使用simulink建立一个双摆的运动模型,然后通过matlab调用该模型,并显示运动效果和运动轨迹。
2.系统仿真结果


3.核心程序与模型
版本:MATLAB2022a
% 设置模拟的双摆数量和步长等参数 Td = 0.025; % 步长大小 T = 0:Td:10; % 时间向量 Tlens = 200; % 轨迹长度 % 设置双摆的初始条件 dangle1=-2;% 第一个摆的初始角速度 dangle2=-1;% 第二个摆的初始角速度 angle1 = pi/2;% 第一个摆的初始角度 angle2 = pi/2;% 第二个摆的初始角度 % 设置每个摆之间的初始相位偏移 Phase = 0.1; % 设置模拟参数:质量、摆长和重力加速度 m1 = 6;% 第一个摆的质量 m2 = 5;% 第二个摆的质量 L1 = 2;% 第一个摆的长度 L2 = 3;% 第二个摆的长度 g = 9.8;% 重力加速度 % 模拟每个双摆的运动 % 调用func_double_pendulm函数模拟双摆运动 [x1(1,:),y1(1,:),x2(1,:),y2(1,:)] = func_double_pendulm(T); % 更新初始角度,为下一个双摆添加相位偏移 angle1 = angle1 +Phase; angle2 = angle2 +Phase;rawnow; end 23
4.系统原理简介
双摆运动系统是一种经典的物理模型,它描述了两个相互连接的摆锤在重力作用下的运动。双摆系统是一个复杂的非线性系统,具有丰富的动态行为和混沌特性。双摆系统由两个摆锤组成,每个摆锤都通过一根无质量的杆连接到固定点或另一个摆锤上。在重力作用下,两个摆锤会在平面内进行周期性的摆动。每个摆锤都具有质量、长度和转动惯量等物理属性。
为了描述双摆系统的运动,我们可以使用拉格朗日方程。拉格朗日方程是一种基于系统能量(动能和势能)来描述系统运动的方法。
首先,我们定义双摆系统的广义坐标。设第一个摆锤与垂直方向的夹角为θ1,第二个摆锤与第一个摆锤的夹角为θ2。这两个广义坐标描述了双摆系统的配置空间。
接下来,我们计算系统的动能和势能。设第一个摆锤的质量为m1,长度为l1;第二个摆锤的质量为m2,长度为l2。系统的动能T可以表示为:
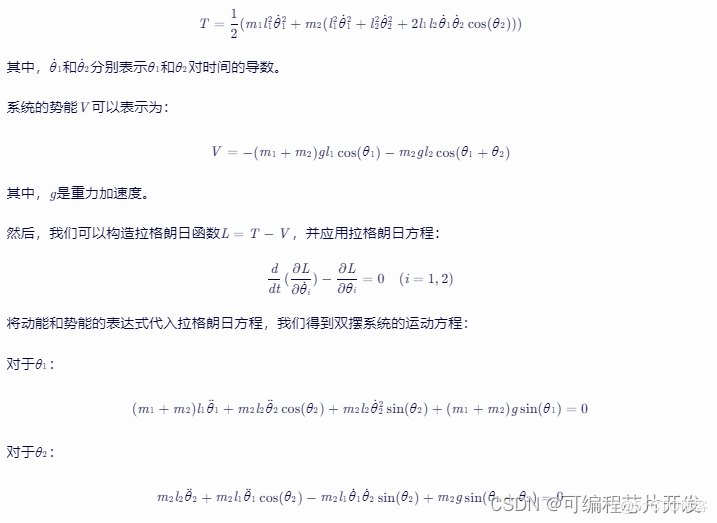
这两个方程描述了双摆系统的动态行为。由于方程中存在非线性项(如sin(θ2)和θ˙1θ˙2),因此双摆系统表现出复杂的非线性特性。
双摆系统作为一种典型的非线性模型,在物理学、工程学、生物学等领域都有广泛的应用。例如,在物理学中,双摆系统可以用于研究非线性振动、混沌和同步等现象;在工程学中,双摆系统可以作为机械系统或控制系统的模型;在生物学中,双摆系统可以模拟某些生物运动(如摆动步态)的动力学特性。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号