基于UKF无迹卡尔曼滤波的电池Soc估计matlab仿真
1.课题概述
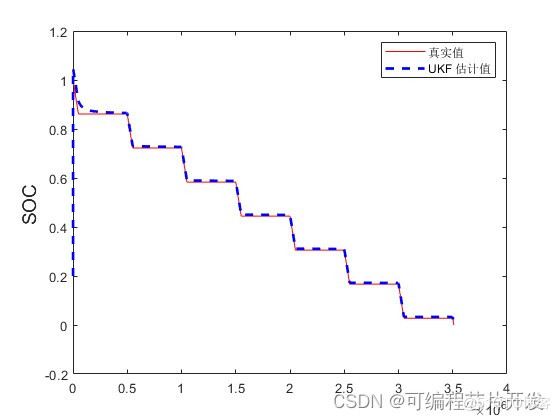
通过UKF无迹卡尔曼滤波对电池的SOC进行估计,并对比电池真实的SOC,输出两者的对比仿真结果。
2.系统仿真结果
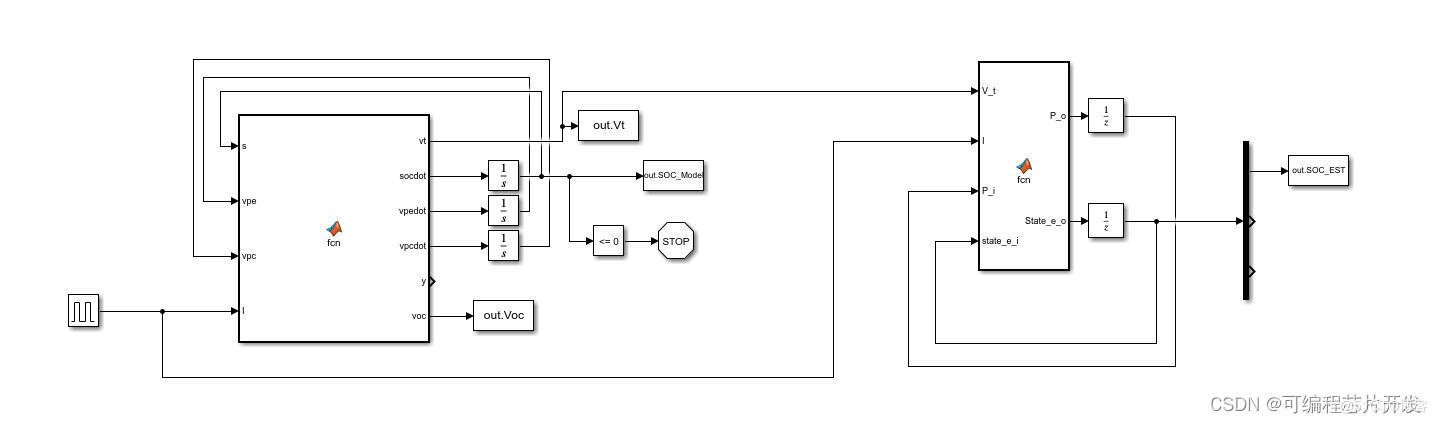
3.核心程序与模型
版本:MATLAB2022a
0021
4.系统原理简介
电池状态估计,特别是电池的荷电状态(State of Charge, SoC)估计,在电动汽车、混合动力汽车以及其他电池应用领域中至关重要。无迹卡尔曼滤波(Unscented Kalman Filter, UKF)是一种非线性滤波方法,特别适用于处理非线性系统的状态估计问题。
4.1 电池模型
为了估计电池的SoC,首先需要建立一个电池模型。电池模型通常包括电气模型、热模型和老化模型等。在这里,我们主要关注电气模型,它描述了电池的电压、电流和SoC之间的关系。
电气模型可以用以下非线性方程表示:

其中,V 是电池端电压,SoC 是电池的荷电状态,I 是电池电流,T 是电池温度,Qnom 是电池的额定容量,Δt 是时间步长,f 是一个非线性函数,描述了电池的电气特性。
4.2 无迹卡尔曼滤波(UKF)
无迹卡尔曼滤波是一种基于无迹变换(Unscented Transformation)的非线性滤波方法。它通过选择一组确定的样本点(称为sigma点)来逼近非线性函数的概率分布,从而避免了线性化带来的误差。无迹卡尔曼滤波的滤波步骤包括预测和更新两个步骤。
预测步骤:
计算sigma点:根据k−1时刻的状态估计x^k−1和协方差估计P^k−1,计算sigma点。
预测sigma点:将sigma点代入状态方程g,得到预测的sigma点。
计算预测的均值和协方差:根据预测的sigma点,计算预测的均值μk∣k−1和协方差Pk∣k−1。
更新步骤:
计算观测sigma点:将预测的sigma点代入观测方程h,得到观测的sigma点。
计算观测的均值和协方差:根据观测的sigma点,计算观测的均值y^k∣k−1和协方差Pyy,k。
计算互协方差:计算状态向量和观测向量之间的互协方差Pxy,k。
计算卡尔曼增益:根据协方差和互协方差,计算卡尔曼增益Kk。
更新状态估计和协方差估计:根据卡尔曼增益和观测残差,更新状态估计x^k和协方差估计P^k。
4.3 UKF在电池SoC估计中的应用
在电池SoC估计中,我们可以将电池的SoC作为状态向量x,电池电流作为输入向量u,电池端电压作为观测向量y。然后,通过无迹卡尔曼滤波的预测和更新步骤,实时估计电池的SoC。
无迹卡尔曼滤波的优点是能够处理非线性系统的状态估计问题,同时避免了线性化带来的误差。然而,无迹卡尔曼滤波的性能也依赖于电池模型的准确性和参数的选择。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号