
基于PI控制和六步逆变器供电的无刷直流电动机控制系统simulink建模与仿真
1.课题概述
基于PI控制和六步逆变器供电的无刷直流电动机控制系统。为了驱动BLDC,通常需要一个逆变器来提供必要的三相电压。而为了精确控制BLDC的速度和位置,则需要一个高效的控制系统。PI(比例-积分)控制器因其简单、可靠和易于调整的特点,在电机控制中得到了广泛应用。本文将详细介绍基于PI控制和六步逆变器供电的BLDC控制系统的原理。
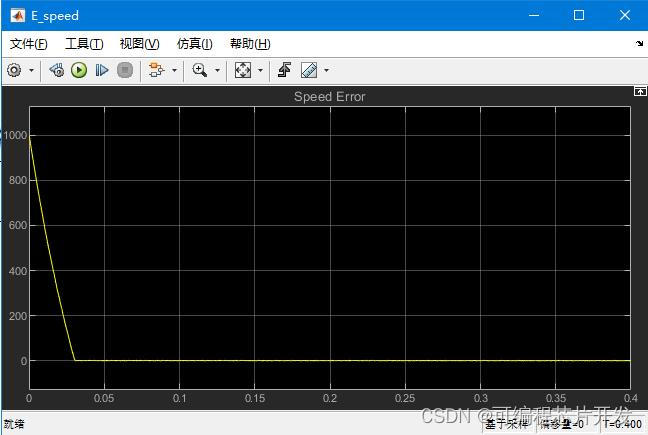
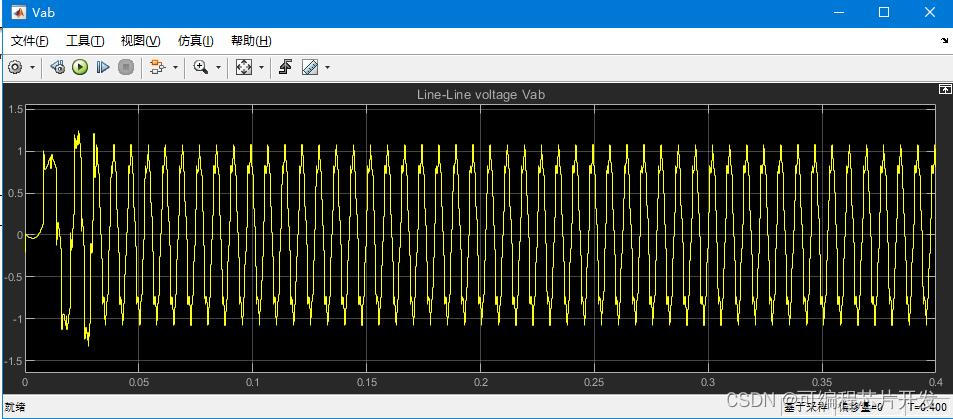
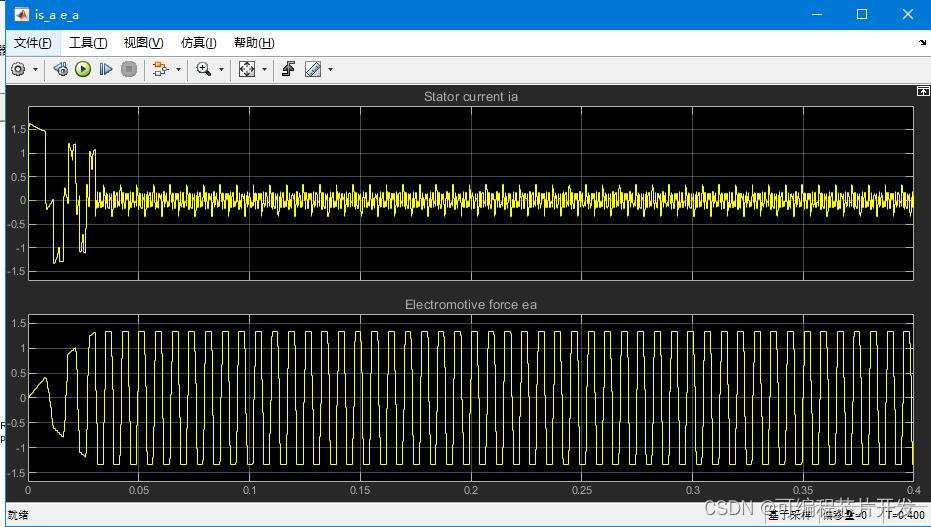
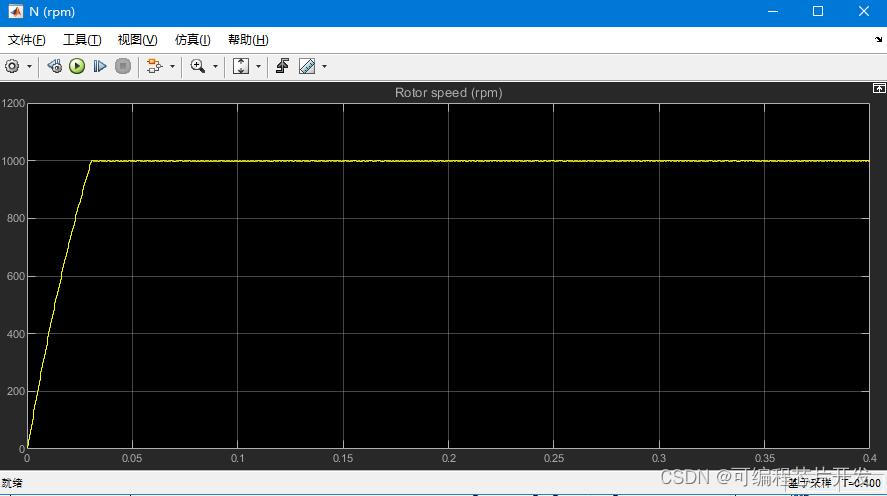
2.系统仿真结果


3.核心程序与模型
版本:MATLAB2022a

16
4.系统原理简介
无刷直流电动机(BLDC)因其高效率、长寿命和低维护成本而被广泛应用于各种工业和消费电子产品中。为了驱动BLDC,通常需要一个逆变器来提供必要的三相电压。而为了精确控制BLDC的速度和位置,则需要一个高效的控制系统。PI(比例-积分)控制器因其简单、可靠和易于调整的特点,在电机控制中得到了广泛应用。
4.1 BLDC工作原理
BLDC的基本结构与传统的有刷直流电机相似,但它使用电子换向器(即逆变器)来替代机械换向器。BLDC的定子通常由三相绕组组成,而转子则由永磁体构成。通过控制逆变器中开关管的导通和关断,可以改变定子绕组的电流方向,从而产生旋转磁场,驱动转子旋转。
4.2 六步逆变器供电原理
六步逆变器是一种常用的BLDC供电方式。它通过将直流电源逆变为三相交流电源,为BLDC提供必要的电压和电流。六步逆变器的工作原理如下:
将直流电源连接到逆变器的输入端;
通过控制逆变器的六个开关管的导通和关断,将直流电源逆变为三相交流电源;
将逆变器的输出端连接到BLDC的三相绕组上,为BLDC提供电压和电流。
在六步逆变器中,通常采用PWM(脉宽调制)技术来控制开关管的导通和关断时间,从而控制输出电压和电流的大小和方向。PWM技术的引入可以大大提高逆变器的效率和性能。
4.3 PI控制器原理
PI控制器是一种线性控制器,其传递函数可以表示为:
(G(s) = K_p + \frac{K_i}{s})
其中,(K_p)为比例系数,(K_i)为积分系数。PI控制器通过对误差信号的比例和积分作用来消除稳态误差,提高系统的动态响应性能。在BLDC控制系统中,PI控制器通常用于控制电机的速度和位置。
4.4 基于PI控制和六步逆变器供电的BLDC控制系统原理
基于PI控制和六步逆变器供电的BLDC控制系统主要由以下几个部分组成:速度传感器、位置传感器、PI控制器、PWM发生器和六步逆变器。其工作原理如下:
速度传感器和位置传感器分别检测电机的实际速度和转子位置;
将检测到的实际速度与设定的参考速度进行比较,得到速度误差信号;
将速度误差信号输入到PI控制器中,经过比例和积分作用后得到控制信号;
将控制信号输入到PWM发生器中,生成PWM波形;
将PWM波形作用于六步逆变器的开关管上,控制开关管的导通和关断时间;
六步逆变器将直流电源逆变为三相交流电源,为BLDC提供必要的电压和电流;
重复以上步骤,实现闭环控制。
在这个过程中,PI控制器的参数设置对于控制系统的性能至关重要。合适的参数可以使系统具有良好的稳定性和动态响应性能。通常需要通过实验或仿真来确定最佳的参数值。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号