
基于LQR控制算法的电磁减振控制系统simulink建模与仿真
1.课题概述
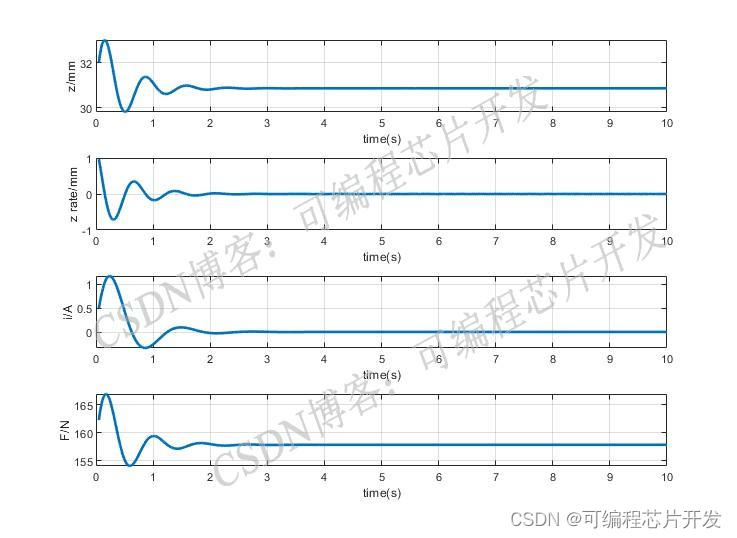
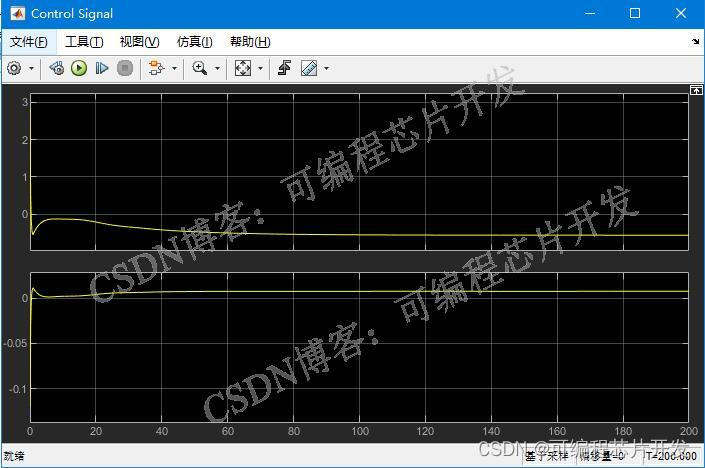
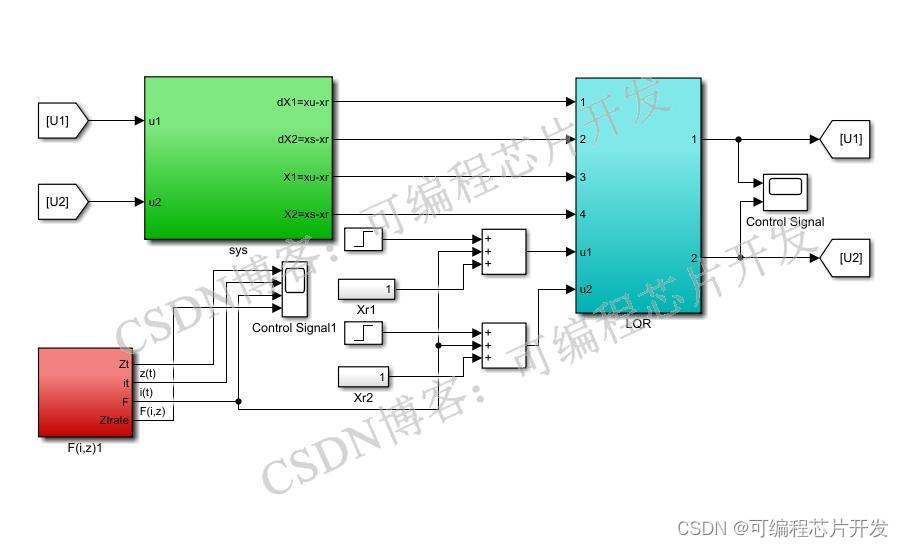
基于LQR控制算法的电磁减振控制系统simulink建模与仿真。仿真输出控制器的收敛曲线。
2.系统仿真结果
3.核心程序与模型
版本:MATLAB2022a
08_029m
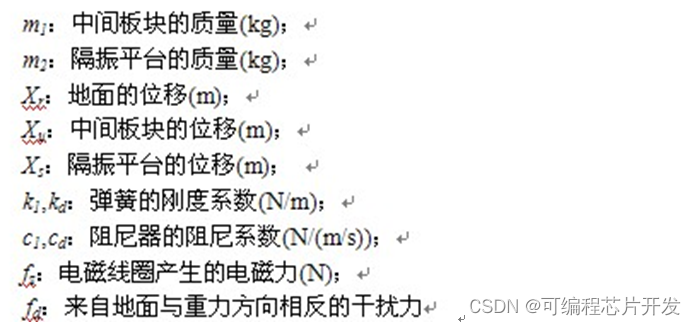
4.系统原理简介
电磁减振控制系统采用线性二次型调节器(Linear Quadratic Regulator, LQR 控制制算法)是一种基于状态空间方法的控制策略,广泛应用于振动抑制、伺服控制、主动减震等领域。它通过最小化一个由状态和控制输入构成的二次成本函数,从而达到控制系统的最优控制目的。
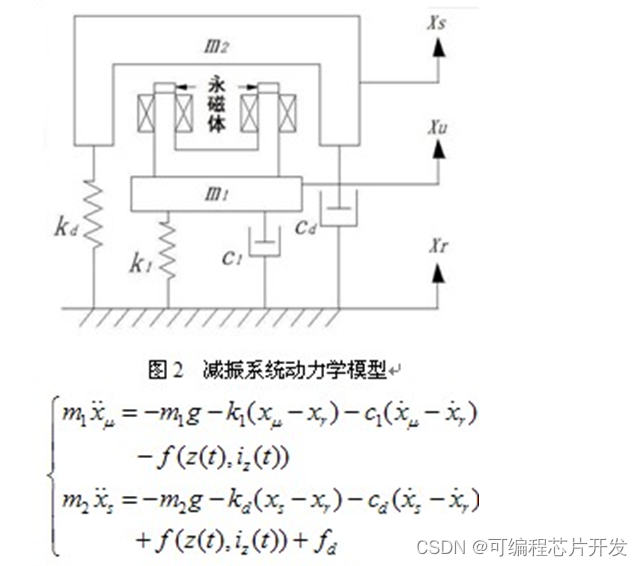
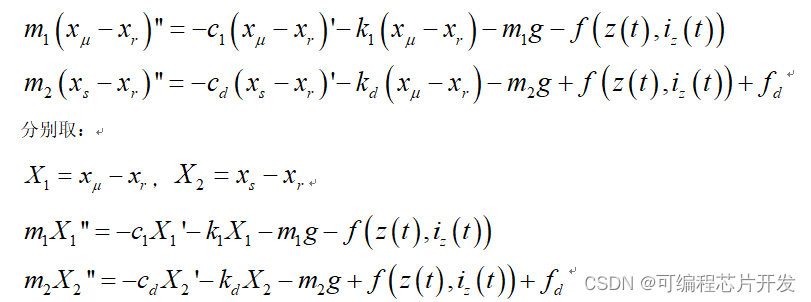
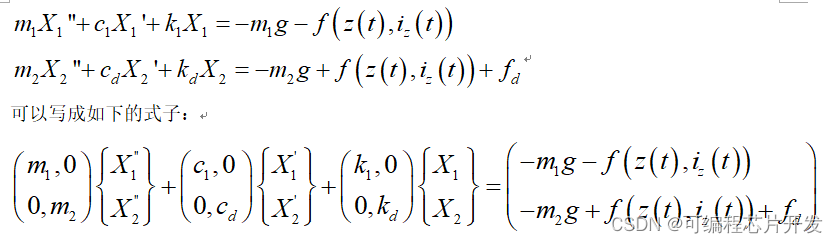
这样,我们就可以建立关于地面位移的相对位移的方程式,于是上面的式子可以等效为:
LQR控制算法通过优化状态和控制输入的二次成本函数,提供了一种有效抑制系统振动的手段。在电磁减振系统中,它利用电磁执行机构的快速响应特性,通过精确控制律动态调整作用力或力矩,实现振动的高效抑制。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号