摘要:  1.课题概述 基于RRT优化算法的机械臂路径规划和避障,先通过RRT优化算法,计算避障路线,然后将机械臂根据规划好的路径进行移动。 2.系统仿真结果 3.核心程序与模型 版本:MATLAB2022a .................................................. 阅读全文
1.课题概述 基于RRT优化算法的机械臂路径规划和避障,先通过RRT优化算法,计算避障路线,然后将机械臂根据规划好的路径进行移动。 2.系统仿真结果 3.核心程序与模型 版本:MATLAB2022a .................................................. 阅读全文
1.课题概述 基于RRT优化算法的机械臂路径规划和避障,先通过RRT优化算法,计算避障路线,然后将机械臂根据规划好的路径进行移动。 2.系统仿真结果 3.核心程序与模型 版本:MATLAB2022a .................................................. 阅读全文
posted @ 2026-03-20 20:13
可编程芯片开发
阅读(3)
评论(0)
推荐(0)
摘要:  1.课题概述 基于爬山法MPPT最大功率跟踪算法的光 伏发电系统simulink建模与仿真。 2.系统仿真结果 3.核心程序与模型 版本:MATLAB2022a 4.系统原理简介 最大功率点跟踪(Maximum Power Point Tracking, MPPT)是光伏发电系统中至关重要的技术,用 阅读全文
1.课题概述 基于爬山法MPPT最大功率跟踪算法的光 伏发电系统simulink建模与仿真。 2.系统仿真结果 3.核心程序与模型 版本:MATLAB2022a 4.系统原理简介 最大功率点跟踪(Maximum Power Point Tracking, MPPT)是光伏发电系统中至关重要的技术,用 阅读全文
1.课题概述 基于爬山法MPPT最大功率跟踪算法的光 伏发电系统simulink建模与仿真。 2.系统仿真结果 3.核心程序与模型 版本:MATLAB2022a 4.系统原理简介 最大功率点跟踪(Maximum Power Point Tracking, MPPT)是光伏发电系统中至关重要的技术,用 阅读全文
posted @ 2026-03-20 20:07
可编程芯片开发
阅读(2)
评论(0)
推荐(0)
 1.课题概述 基于EKF扩展卡尔曼滤波 的一阶环形倒立摆控制系统simulink建模与仿真。基于扩展卡尔曼滤波(Extended Kalman Filter, EKF)的一阶环形倒立摆控制系统,是结合了现代控制理论与估计理论的经典应用案例,旨在提高对倒立摆系统状态的实时估计精度,从而实现更稳健的控制
1.课题概述 基于EKF扩展卡尔曼滤波 的一阶环形倒立摆控制系统simulink建模与仿真。基于扩展卡尔曼滤波(Extended Kalman Filter, EKF)的一阶环形倒立摆控制系统,是结合了现代控制理论与估计理论的经典应用案例,旨在提高对倒立摆系统状态的实时估计精度,从而实现更稳健的控制  1.课题概述 基于SVPWM的飞轮控制系统 的simulink建模与仿真。SVPWM的核心思想是将逆变器输出的三相电压矢量在两相静止坐标系(αβ坐标系)中表示,通过控制这些电压矢量的合成效果,精确地追踪期望的圆形电压空间矢量轨迹,以实现对交流电机的高效控制。SVPWM相比传统的脉宽调制(PWM),能
1.课题概述 基于SVPWM的飞轮控制系统 的simulink建模与仿真。SVPWM的核心思想是将逆变器输出的三相电压矢量在两相静止坐标系(αβ坐标系)中表示,通过控制这些电压矢量的合成效果,精确地追踪期望的圆形电压空间矢量轨迹,以实现对交流电机的高效控制。SVPWM相比传统的脉宽调制(PWM),能  1.课题概述 基于PSO粒子群优化的PV光 伏发电系统simulink建模与仿真。通过PSO粒子群优化进行最大功率跟踪。 2.系统仿真结果 3.核心程序与模型 版本:MATLAB2022a 4.系统原理简介 光伏(Photovoltaic, PV)发电系统利用太阳能直接转换成电能,是实现可持续能源战
1.课题概述 基于PSO粒子群优化的PV光 伏发电系统simulink建模与仿真。通过PSO粒子群优化进行最大功率跟踪。 2.系统仿真结果 3.核心程序与模型 版本:MATLAB2022a 4.系统原理简介 光伏(Photovoltaic, PV)发电系统利用太阳能直接转换成电能,是实现可持续能源战  1.课题概述 基于模糊控制的AMT自动变速汽车换档智能控制系统 simulink建模与仿真。 2.系统仿真结果 输入的V,Ac,a 输出的档位: 3.核心程序与模型 版本:MATLAB2022a 4.系统原理简介 基于模糊控制的AMT(Automated Manual Transmission)自动
1.课题概述 基于模糊控制的AMT自动变速汽车换档智能控制系统 simulink建模与仿真。 2.系统仿真结果 输入的V,Ac,a 输出的档位: 3.核心程序与模型 版本:MATLAB2022a 4.系统原理简介 基于模糊控制的AMT(Automated Manual Transmission)自动  1.课题概述 基于MPPT最大功率跟踪和SVPWM的光伏三相并网逆变器simulink建模与仿真。包括PV模块,MPPT模块,SVPWM模块,电网模块等。 2.系统仿真结果 3.核心程序与模型 版本:MATLAB2022a
1.课题概述 基于MPPT最大功率跟踪和SVPWM的光伏三相并网逆变器simulink建模与仿真。包括PV模块,MPPT模块,SVPWM模块,电网模块等。 2.系统仿真结果 3.核心程序与模型 版本:MATLAB2022a  1.课题概述 基于PSO优化的PV光伏发电系统simulink建模与仿真。其中PSO采用matlab编程实现,通过simulink的函数嵌入模块,将matlab调用进simulink中。 2.系统仿真结果 3.核心程序与模型 版本:MATLAB2022a 4.系统原理简介 在光伏(Photovolt
1.课题概述 基于PSO优化的PV光伏发电系统simulink建模与仿真。其中PSO采用matlab编程实现,通过simulink的函数嵌入模块,将matlab调用进simulink中。 2.系统仿真结果 3.核心程序与模型 版本:MATLAB2022a 4.系统原理简介 在光伏(Photovolt  1.课题概述 基于遗传优化模糊控制器的水箱水位控制系统simulink建模与仿真。对比模糊控制器和基于遗传优化的模糊控制器。 2.系统仿真结果 3.核心程序与模型 版本:MATLAB2022a .....................................................
1.课题概述 基于遗传优化模糊控制器的水箱水位控制系统simulink建模与仿真。对比模糊控制器和基于遗传优化的模糊控制器。 2.系统仿真结果 3.核心程序与模型 版本:MATLAB2022a .....................................................  1.课题概述 基于simulink的电弧炉模型建模与仿真,输出电弧炉模型的电压曲线和电流曲线以及U-I分布图。 2.系统仿真结果 3.核心程序与模型 版本:MATLAB2022a 4.系统原理简介 电弧炉通过在电极与炉料之间产生高压电弧来加热炉料。炉料主要包括废钢、生铁、合金材料以及造渣剂等。电弧的
1.课题概述 基于simulink的电弧炉模型建模与仿真,输出电弧炉模型的电压曲线和电流曲线以及U-I分布图。 2.系统仿真结果 3.核心程序与模型 版本:MATLAB2022a 4.系统原理简介 电弧炉通过在电极与炉料之间产生高压电弧来加热炉料。炉料主要包括废钢、生铁、合金材料以及造渣剂等。电弧的  1.课题概述 基于阶梯式碳交易机制的电制氢综合能源系统热电优化matlab仿真。全球气候变暖,我国提出 “双碳” 目标,电力行业碳减排对实现目标意义重大。综合能源系统(IES)可优化多能系统低碳经济性,但多数文献在研究 IES 时,存在碳排放模型简单、未充分考虑碳交易市场作用、忽略 P2G 两阶段运
1.课题概述 基于阶梯式碳交易机制的电制氢综合能源系统热电优化matlab仿真。全球气候变暖,我国提出 “双碳” 目标,电力行业碳减排对实现目标意义重大。综合能源系统(IES)可优化多能系统低碳经济性,但多数文献在研究 IES 时,存在碳排放模型简单、未充分考虑碳交易市场作用、忽略 P2G 两阶段运  1.课题概述 基于SIMMECHANICS的单自由度磁悬浮隔振器PID控制系统simulink建模与仿真。其中,SIMMECHANICS是MATLAB仿真中的一个工具箱,同时结合SIMULINK、MATLAB的功能。利用SIMMECHANICS模块框图对机构运动进行建模和动态仿真。 2.系统仿真结果
1.课题概述 基于SIMMECHANICS的单自由度磁悬浮隔振器PID控制系统simulink建模与仿真。其中,SIMMECHANICS是MATLAB仿真中的一个工具箱,同时结合SIMULINK、MATLAB的功能。利用SIMMECHANICS模块框图对机构运动进行建模和动态仿真。 2.系统仿真结果  1.课题概述 基于FPGA的AES加解密系统verilog实现,包含testbench和开发板硬件测试。输入待加密数据,密钥,输出加密数据,然后通过解密模块输出解密后的原数据。 2.系统测试效果 仿真测试 硬件测试 3.核心程序与模型 `timescale 1ns / 1ps module tops
1.课题概述 基于FPGA的AES加解密系统verilog实现,包含testbench和开发板硬件测试。输入待加密数据,密钥,输出加密数据,然后通过解密模块输出解密后的原数据。 2.系统测试效果 仿真测试 硬件测试 3.核心程序与模型 `timescale 1ns / 1ps module tops  1.课题概述 基于滑膜控制器的分数阶非线性悬架模型simulink建模与仿真。通过simulink搭建含分数阶的悬架非线性仿真模型。仿真分析轮胎动载荷的幅频特性,电机垂直加速度的幅频特性,悬架动扰度的幅频特性,车身垂直加速度的幅频特性。 2.系统仿真结果 3.核心程序与模型 版本:Matlab202
1.课题概述 基于滑膜控制器的分数阶非线性悬架模型simulink建模与仿真。通过simulink搭建含分数阶的悬架非线性仿真模型。仿真分析轮胎动载荷的幅频特性,电机垂直加速度的幅频特性,悬架动扰度的幅频特性,车身垂直加速度的幅频特性。 2.系统仿真结果 3.核心程序与模型 版本:Matlab202  1.课题概述 基于时空相关性的风电功率预测模型matlab建模与仿真。 2.系统仿真结果 3.核心程序与模型 版本:Matlab2024b ................................................................... figure subpl
1.课题概述 基于时空相关性的风电功率预测模型matlab建模与仿真。 2.系统仿真结果 3.核心程序与模型 版本:Matlab2024b ................................................................... figure subpl 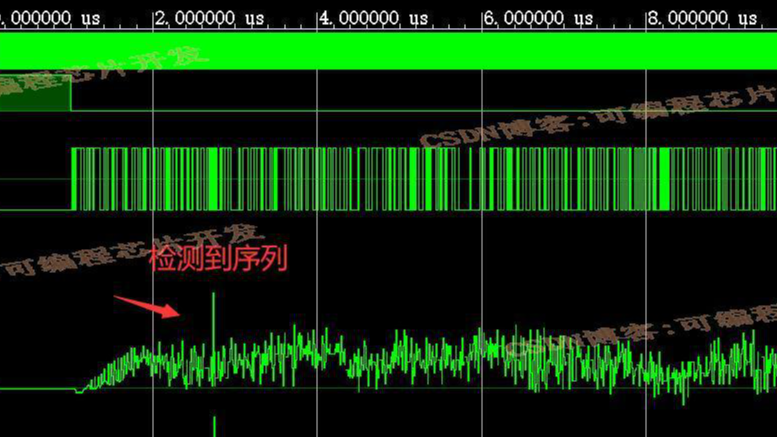 1.课题概述 本课题采用基于伪码匹配相关峰检测的方式实现基于FPGA的特定序列检测器verilog实现,包含testbench和开发板硬件测试。 2.系统测试效果 当检测到序列的时候,峰值变量opeak会输出一个峰值,然后flag产生一个高电平,表示检测到序列。 3.核心程序与模型 `timesca
1.课题概述 本课题采用基于伪码匹配相关峰检测的方式实现基于FPGA的特定序列检测器verilog实现,包含testbench和开发板硬件测试。 2.系统测试效果 当检测到序列的时候,峰值变量opeak会输出一个峰值,然后flag产生一个高电平,表示检测到序列。 3.核心程序与模型 `timesca 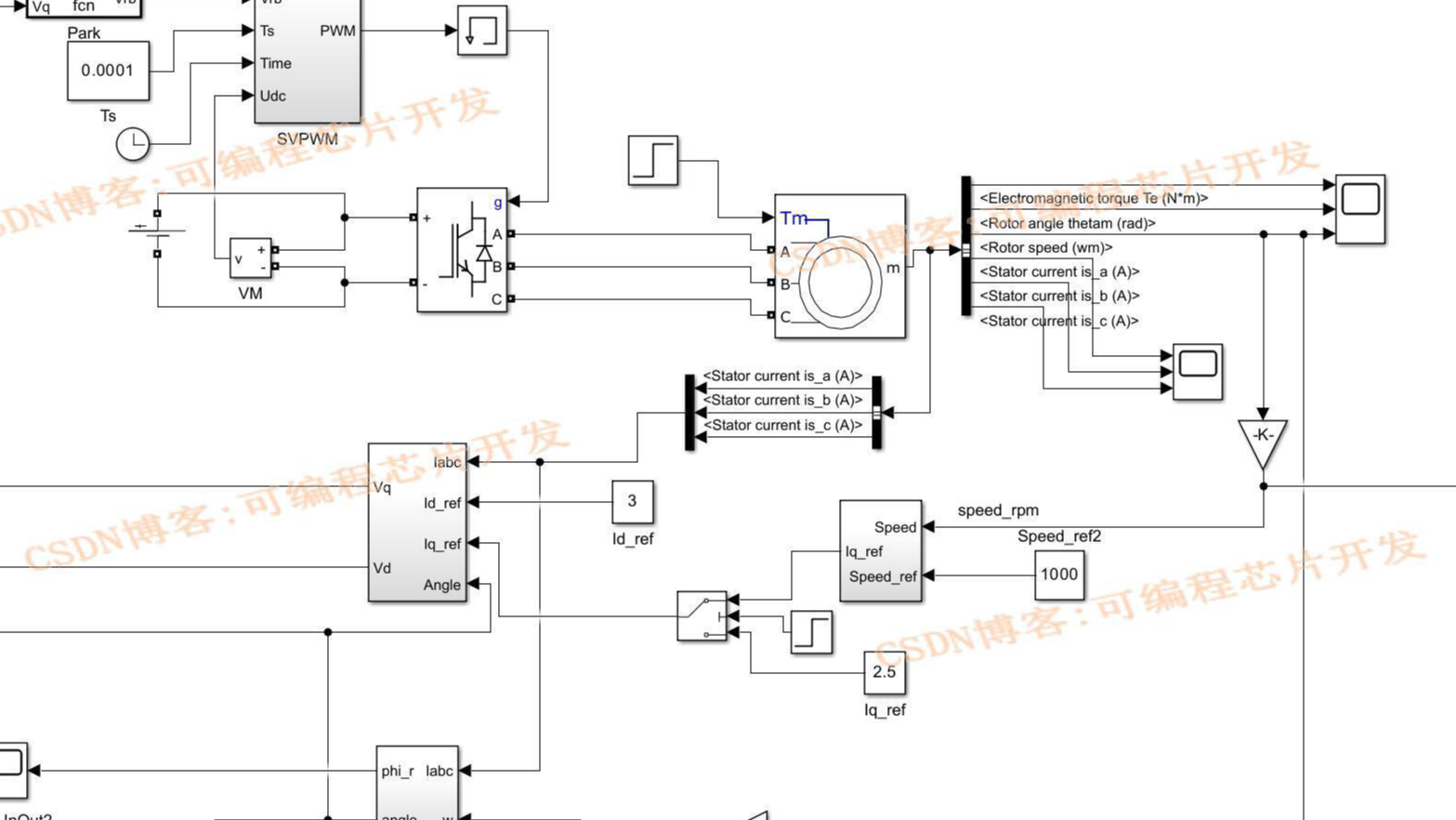 1.课题概述 基于SVPWM和Park变换的异步电机转速控制系统simulink建模与仿真。系统包括SVPWM模块,Park变换模块,异步电机模块以及逆变器模块等。 2.系统仿真结果 3.核心程序与模型 版本:Matlab2024b 4.系统原理简介 异步电机由于其结构简单、可靠性高、成本低等优点,
1.课题概述 基于SVPWM和Park变换的异步电机转速控制系统simulink建模与仿真。系统包括SVPWM模块,Park变换模块,异步电机模块以及逆变器模块等。 2.系统仿真结果 3.核心程序与模型 版本:Matlab2024b 4.系统原理简介 异步电机由于其结构简单、可靠性高、成本低等优点, 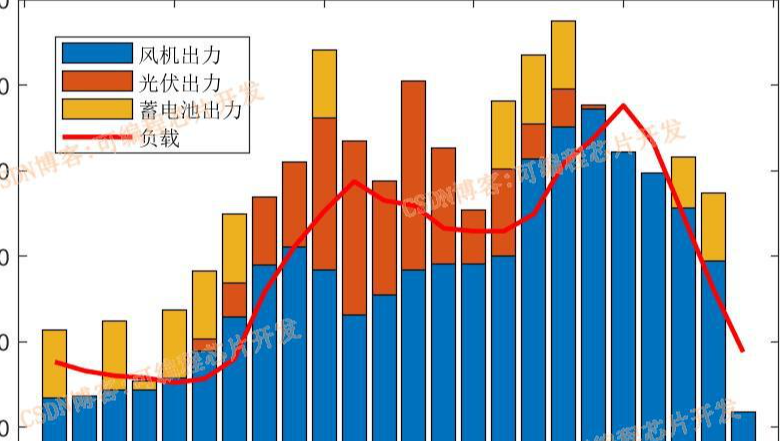 1.课题概述 微电网作为分布式能源系统的核心组成部分,其优化调度是实现能源高效利用和经济运行的关键。传统的微电网调度问题通常采用启发式算法,但存在收敛速度慢、易陷入局部最优等缺陷。YALMIP作为强大的优化建模工具,结合CPLEX求解器,为微电网调度问题提供了精确的数学规划解决方案。 2.系统仿真结
1.课题概述 微电网作为分布式能源系统的核心组成部分,其优化调度是实现能源高效利用和经济运行的关键。传统的微电网调度问题通常采用启发式算法,但存在收敛速度慢、易陷入局部最优等缺陷。YALMIP作为强大的优化建模工具,结合CPLEX求解器,为微电网调度问题提供了精确的数学规划解决方案。 2.系统仿真结 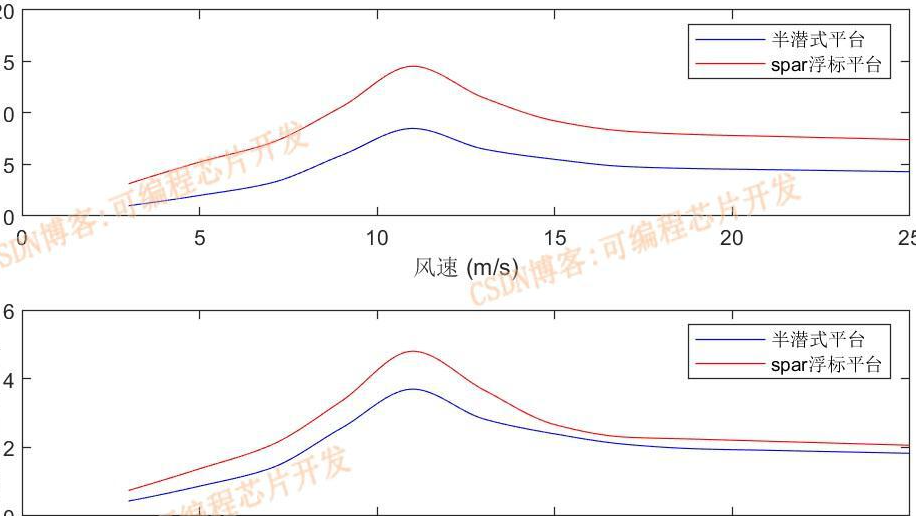 1.课题概述 基于漂浮式海上风电场系统的浮式风力发电机matlab仿真,通过MATLAB数值仿真对浮式风力发电机的性能做模拟与仿真。 2.系统仿真结果 3.核心程序与模型 版本:Matlab2022a/Matlab2024b % 调用波浪谱计算函数,风速20m/s [Si1, ai1, wi1] =
1.课题概述 基于漂浮式海上风电场系统的浮式风力发电机matlab仿真,通过MATLAB数值仿真对浮式风力发电机的性能做模拟与仿真。 2.系统仿真结果 3.核心程序与模型 版本:Matlab2022a/Matlab2024b % 调用波浪谱计算函数,风速20m/s [Si1, ai1, wi1] =  浙公网安备 33010602011771号
浙公网安备 33010602011771号