摘要:
3D目标检测 坐标系变换 双目距离估计 Kitti数据集 PointPillar,VoxelNet系列算法 阅读全文
摘要:
文件夹解释 usr目录 /usr/bin:自己安装的软件的二进制执行文件(命令),例如cmake,gcc等 /usr/include:存放头文件,例如stdlib.h,iostream(存放于c++/7)等 /usr/lib:常用的动态链接库和软件包的配置文件 /usr/share:帮助文档和共享文 阅读全文
摘要: 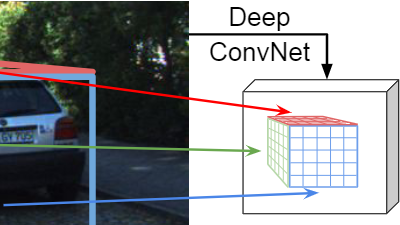 论文解读 论文地址 两大发现: 可以根据2D检测器检测出来的2D bbox得出粗糙的3D bbox作为Guidance 前人的方法直接在2D BBox区域提取特征信息,带来表征歧义,本文通过提取2D BBox的面特征来消除这一问题。 方法流程 3D BBox的描述为:\(B_g=(w_g, h_g, 阅读全文
论文解读 论文地址 两大发现: 可以根据2D检测器检测出来的2D bbox得出粗糙的3D bbox作为Guidance 前人的方法直接在2D BBox区域提取特征信息,带来表征歧义,本文通过提取2D BBox的面特征来消除这一问题。 方法流程 3D BBox的描述为:\(B_g=(w_g, h_g, 阅读全文
论文解读 论文地址 两大发现: 可以根据2D检测器检测出来的2D bbox得出粗糙的3D bbox作为Guidance 前人的方法直接在2D BBox区域提取特征信息,带来表征歧义,本文通过提取2D BBox的面特征来消除这一问题。 方法流程 3D BBox的描述为:\(B_g=(w_g, h_g, 阅读全文
摘要:
KITTI CityScapes3D 阅读全文
摘要:
池化 SPP 并行的进行不同kernel_size的maxpool,再将结果进行cancate 点击查看SPP代码 class SPP(nn.Module): # Spatial pyramid pooling layer used in YOLOv3-SPP def __init__(self, 阅读全文
摘要:
YOLO V4-large 创建模型 V4 large通过yaml文件创建网络模型;yaml文件通过yaml.load(cfg)之后会得到一个字典文件: self.yaml: { nc: , depth_multiple: , width_multiple: , anchors: , backbon 阅读全文
摘要:
COCO数据集 coco2017 ├── annotations │ ├── instances_train2017.json │ └── instances_val2017.json ├── test2017 ├── train2017 └── val2017 YOLO 标注格式 阅读全文
摘要:
Pytorch环境 在网址torch-torchvision-python版本对应中查看你想要安装的torch和torchvision以及对应的python版本 安装对应版本的python 查看计算机CUDA版本,一般是在/usr/local/下面。 在网址https://download.pyto 阅读全文
摘要:
os命令 os.listdir(path):返回path路径下所有文件和文件夹的名称列表 import os #os.path.join() 将分离的部分合成一个整体 filename=os.path.join('/home/ubuntu/python_coding','split_func') p 阅读全文