停车位检测---VPS-Net
将空闲停车位检测分为两步:(1)停车位检测;(2)占有率检测;
先验:
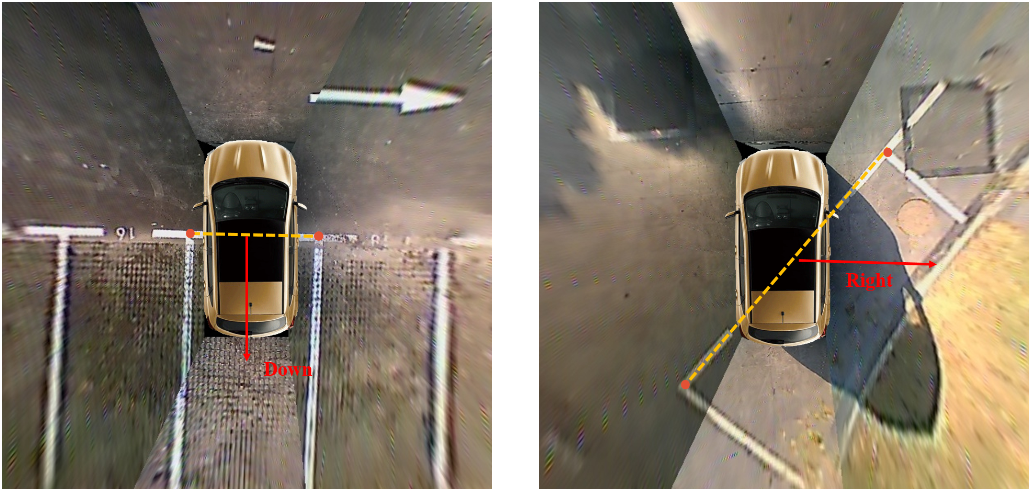
- 汽车在环视图中的位置坐标;
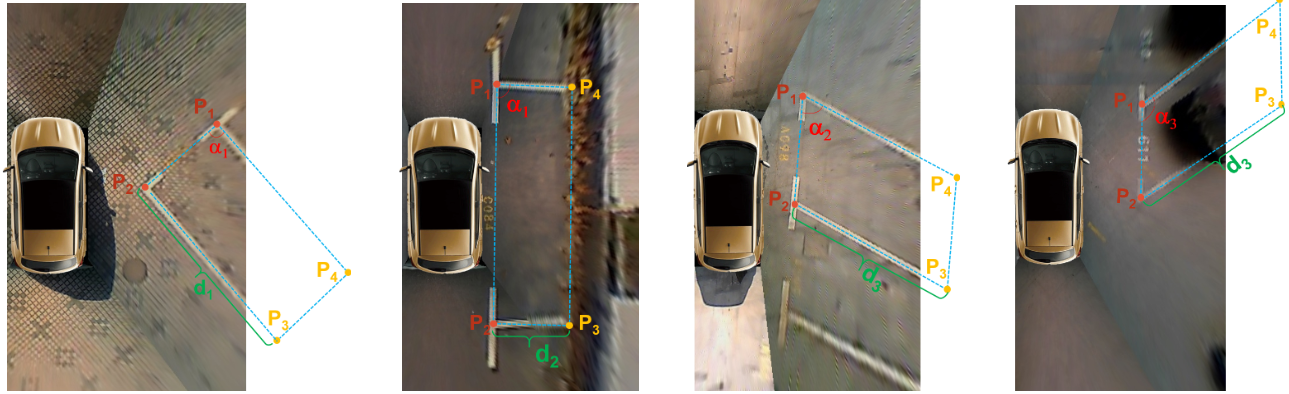
- 停车位的深度;(两个,根据进入线长度分类)
- 倾斜停车位的角度;(两个,钝角和锐角)
- 停车进入是车尾先进库
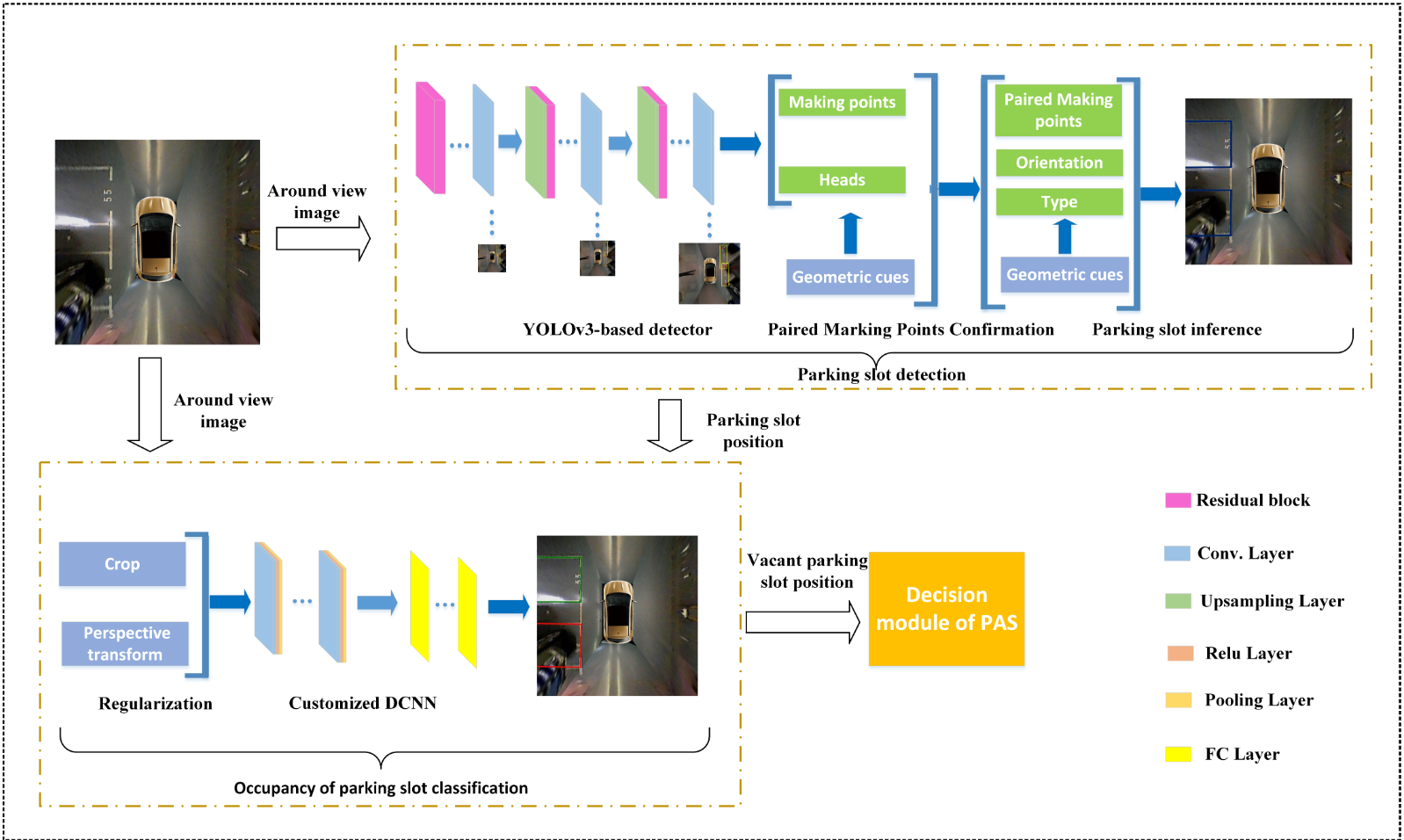
目标物被分为4类:直角头、钝角头、锐角头、T-型或L-型Marking Point
ps_detector.detect_ps(img, conf_thres, nms_thres)
[convolutional]
filter = 27 #3 * (4 + 5)
[yolo]
mask = 1, 2, 3
classes = 4
num = 9
网络流程
- YOLO V3预测结果:
[cx, cy, w, h, conf, cls0, cls1, cls2, cls3] - NMS
9变7(conf和cls1,2,3,4相乘取最大值)
[x1, y1, x2, y2, conf, cls_conf, cls_pred]
cls_pred=0:直角头,angle=90
cls_pred=1:锐角头,angle=67
cls_pred=2:钝角头,angle=129
cls_pred=3,T型或L型的marking point
- 对于每个ps_head(cls_pred=0,1,2),检测起内部有几个 marking points(cls_pred=3)
如果ps_head中这2个点则将2个点匹配为ps
否则根据明亮度画
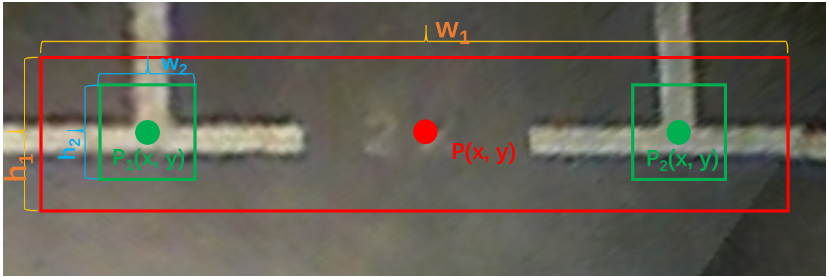
返回ps:[[[x1, y1], [x2, y2], angle], [], ...]也即是[[point1, point2, angle], [], ...]
point坐标和先验的角度,计算另外两个点的坐标
计算时也需要先验,对于p1到p2距离大于200的,depth=250,p1到p2距离小于200的depth=125
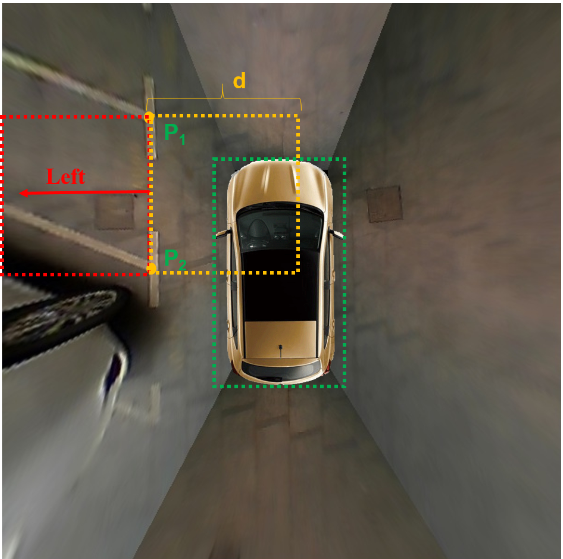
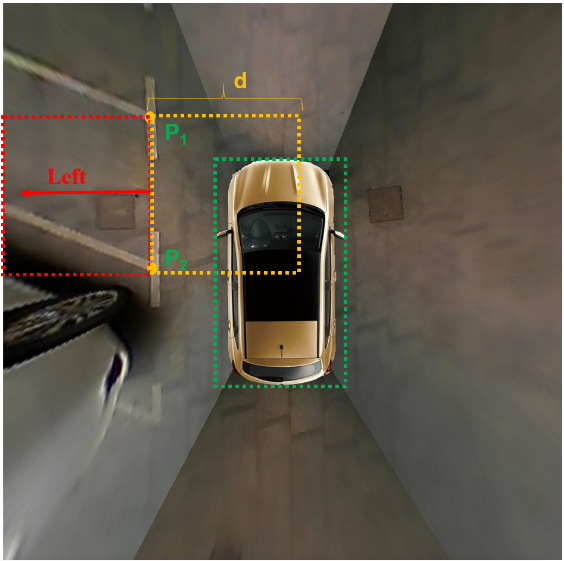
但是只根据角度和两个点以及深度还无法得出结论,另外的两个点可能出现在停车位的两侧都有可能
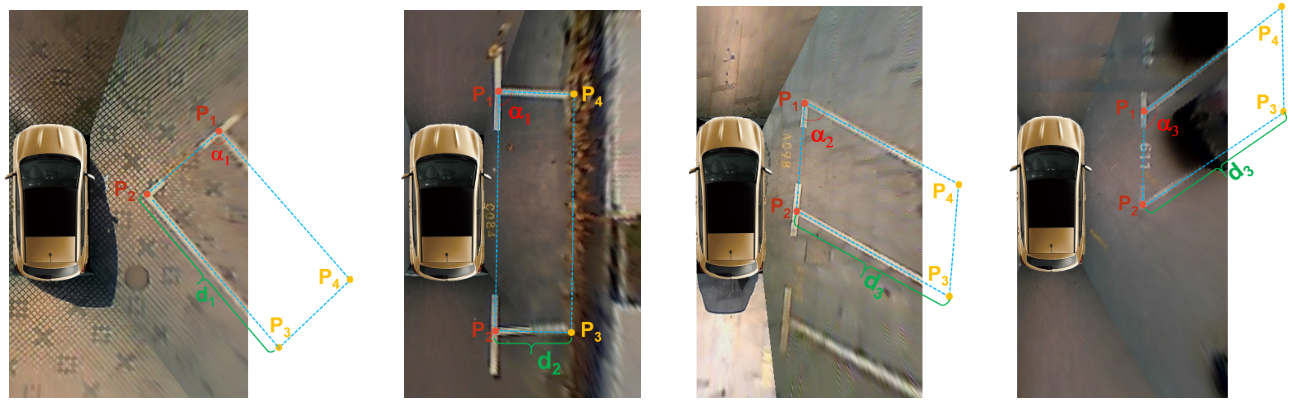
对于进入线和汽车没有相交时:计算枚举的两边的方框(黄色和红色)与车辆位置方框(绿色)的IoU,选取IoU小的为最终位置
对于进入线和汽车相交的情况:垂直和平行的车库,一定是汽车尾巴在里面,倾斜的,根据进入线的斜率判断