Range view 3D目标检测
本文介绍采用点云的Range view表征方式来进行3D目标检测的方法。
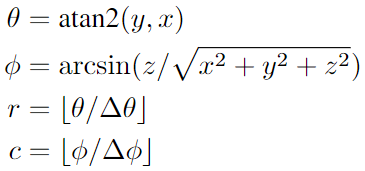
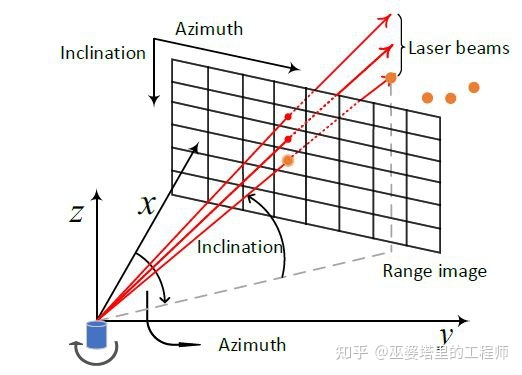
将点云映射并离散化成2D point map的公式如下:\(\theta\) 是点云和 \(X\) 轴的夹角,\(\phi\) 是点云和 \(X-Y\) 平面的夹角(方位角和高程角)。\(r\) 和 \(c\) 是映射的点云在2D图上的水平和垂直坐标。
投影映射得到的2D图片的值使用双通道 \((d, z)\) 填充,其中 \(d = \sqrt[2]{x^2+y^2}\) 表示到 \(Z\) 轴的距离,是围绕 \(Z\) 轴旋转不变的。对于没有点的地方使用 \((0,0)\) 填充,对于有两个点(几乎不存在此情况)采样最近的点。
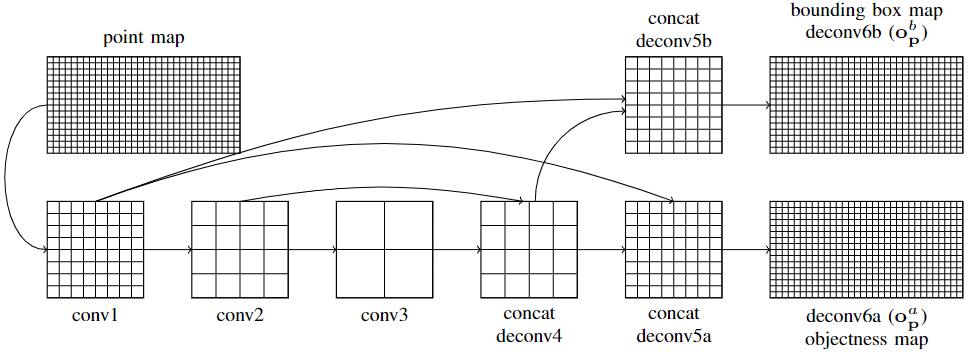
VeloFCN-2016