MVF-Net
算法思想
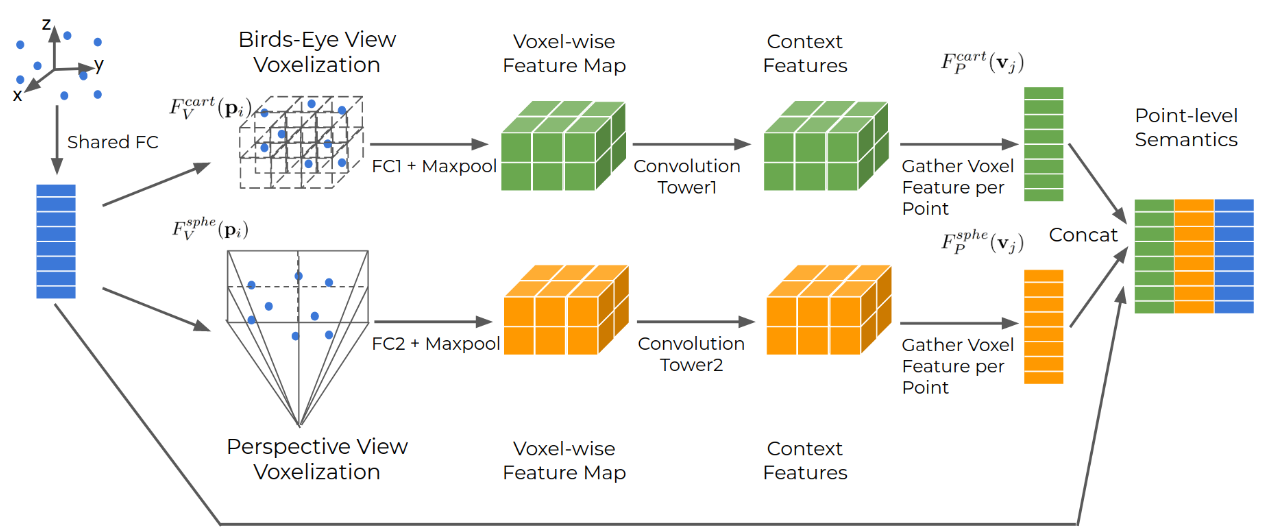
融合相同点云的不同视角:(1)BEV;(2)Perspective View
| 视角 | 坐标系 | 优点 | 缺点 |
|---|---|---|---|
| BEV | 笛卡尔坐标系 | 形状不随距离改变 | 长距离时非常稀疏 |
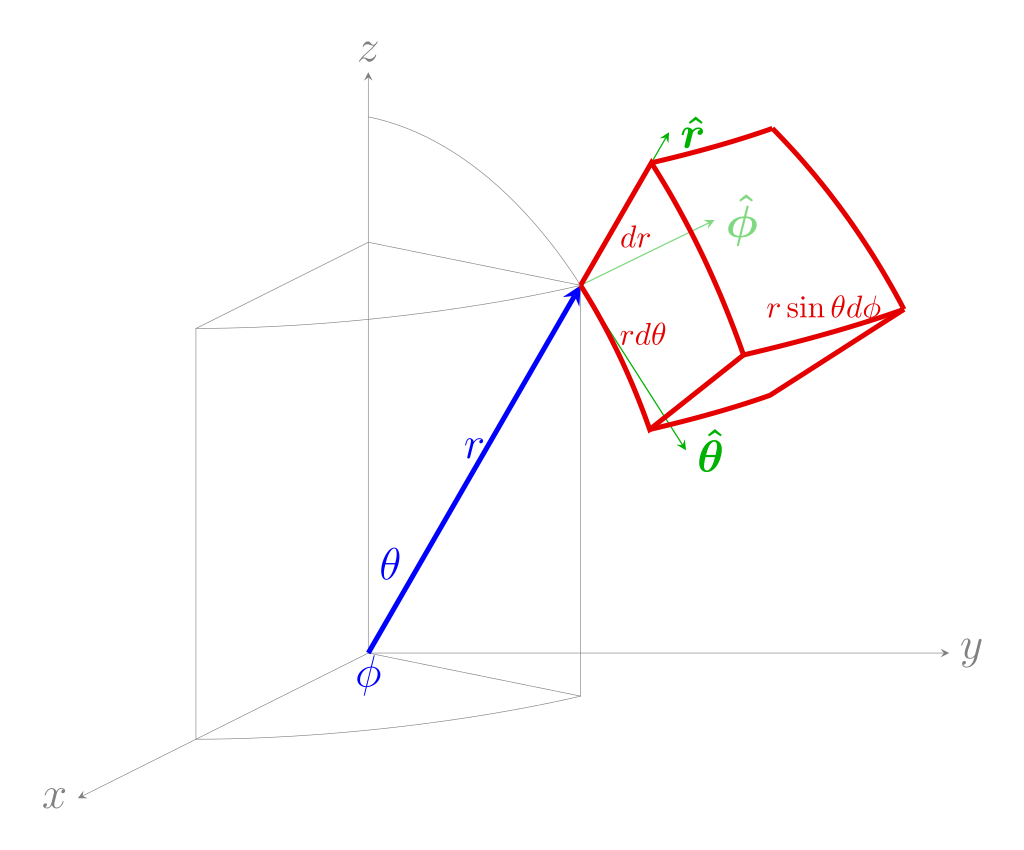
| Perspective | 球坐标系 | 形状随距离改变、物体在点云场景下高度重叠 | can represent the LiDAR range image densely, and can have a corresponding tiling of the scene in the Spherical coordinate system. |
BEV视角是在笛卡尔坐标系下,每个体素是长方体。
Perspective view是球坐标系下,每个体素是frustum,采用PointPillasr的形式的话,在r方向上是不做限制的。
算法流程
Voxelization
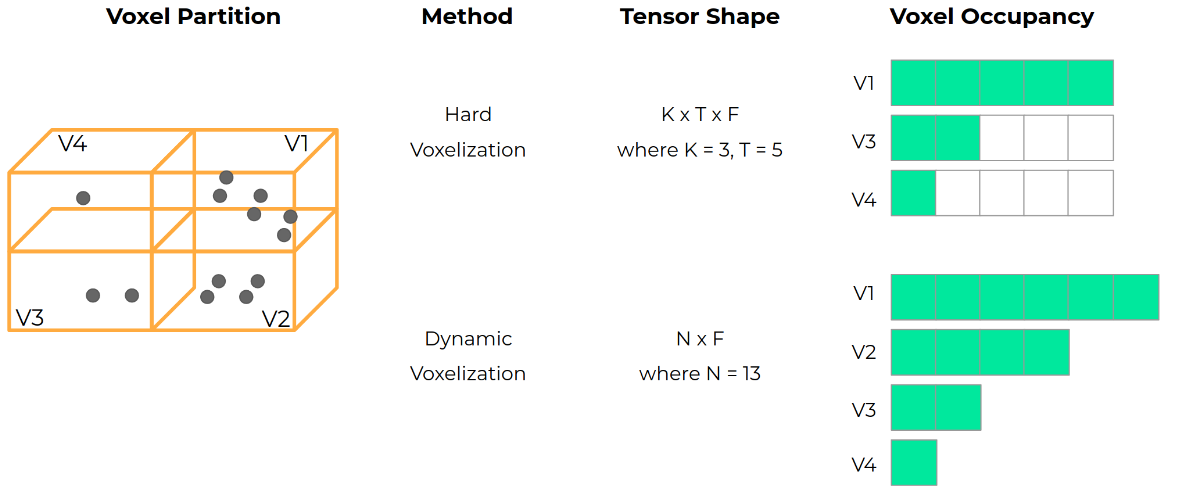
体素化点云的过程分为两部分:(1)Grouping(根据坐标); (2)Sampling(根据体素容量随机采样或填充)
hard voxelization:给定点云集合\(P=\{p_1, p_2,...,p_N\}\),将 \(N\) 个点云存入大小为 \(K\times T\times F\) 的buffer。其中 \(K\) 是Voxel的个数,\(T\) 是每个Voxel中的点云个数,\(T\) 是每个点云的特征个数。当Voxel(或者Voxel内的点)的总个数大于 \(K\)(或者 \(T\))时进行下采样,不足时用0填充。
因为hard voxelization的采样过程的随机性,导致其可能产生不稳定的检测结果,同时填充也会增加计算量。
dynamic voxelization:Grouping过程不变,但是不进行Sampling,每个buffer不再采用固定大小,而采用动态的过程,保留了每个Voxel和每个Voxel内部的点。
如下对比图,对于hard voxelization这种采用固定buffer数量的方式,如果要保留所有的点,相比于dynamic voxelization需要分配更多的空间。
Feature Fusion
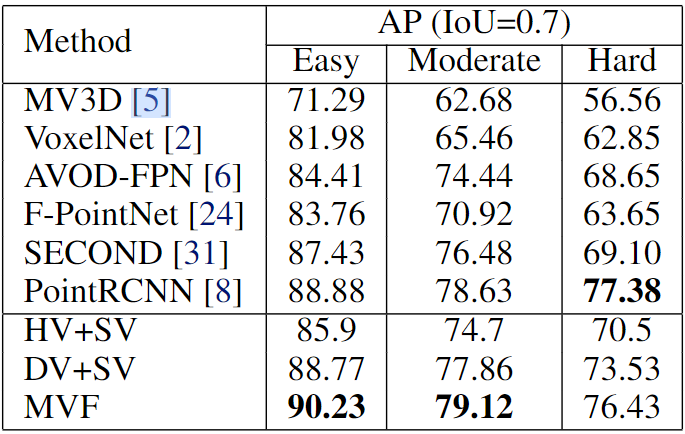
试验结果
KITTI数据集