
convert CAN frame
前言
最近了解了一些socket can的知识点,本文主要介绍如何将数据转换为CAN报文,前提是已经确定CAN的传输协议。
本文使用的CAN报文共有22条,这些报文共用一个can id,每条报文使用序号标志;
报文协议
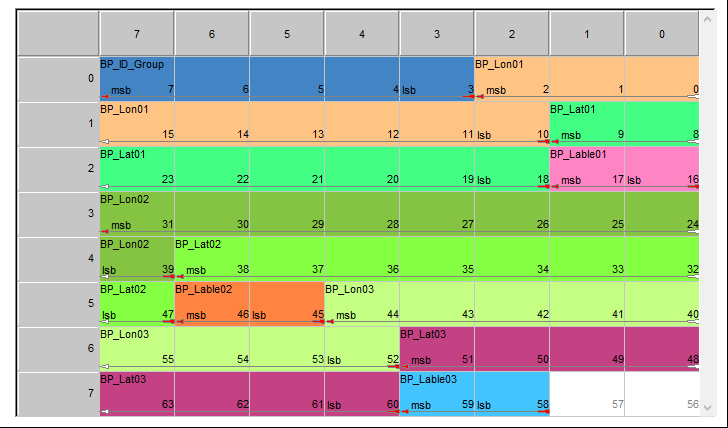
转换数据程序



char* convert_buf(vector<Point>& probp, vector<Distance>& pdist, vector<int>& plabel) { //convert-can-frame. char buffer[22][8] = { 0 }; for (int i = 0; i < 22; i++) { double lat_factor = 0.1; double long_factor = 0.2; unsigned int lat01 = static_cast<unsigned int>(pdist[3 * i].x_dis / lat_factor);//unit-2dm-8bits. unsigned int long01 = static_cast<unsigned int>(pdist[3 * i].y_dis / long_factor);//unit-2dm-9bits. int label01 = plabel[i*3]; if (i == 21) { buffer[i][0] = (((i+1) & 0xFF) << 3) + ((long01 & 0x1FF) >> 6); buffer[i][1] = ((long01 & 0x1FF) << 2) + ((lat01 & 0xFF) >> 6); buffer[i][2] = ((lat01 & 0xFF) << 2) + (label01 & 0x03); break; } unsigned int lat02 = static_cast<unsigned int>(pdist[3 * i + 1].x_dis / lat_factor);//unit-2dm-8bits. unsigned int long02 = static_cast<unsigned int>(pdist[3 * i + 1].y_dis / long_factor);//unit-2dm-9bits. int label02 = plabel[3 * i + 1]; unsigned int lat03 = static_cast<unsigned int>(pdist[3 * i + 2].x_dis / lat_factor);//unit-2dm-8bits. unsigned int long03 = static_cast<unsigned int>(pdist[3 * i + 2].y_dis / long_factor);//unit-2dm-9bits. int label03 = plabel[3 * i + 2]; std::cout << "long01 --- " << long01 << "-- long02 --- " << long02 << "--- long03 --- " << long03 << std::endl; buffer[i][0] = (((i + 1) & 0xFF) << 3) + ((long01 & 0x1FF) >> 6); buffer[i][1] = ((long01 & 0x1FF) << 2) + ((lat01 & 0xFF) >> 6); buffer[i][2] = ((lat01 & 0xFF) << 2) + (label01 & 0x03); buffer[i][3] = ((long02 & 0x1FF) >> 1); buffer[i][4] = ((long02 & 0x1FF) << 7) + ((lat02 & 0xFF) >> 1); buffer[i][5] = ((lat02 & 0xFF) << 7) + ((label02 & 0x03) << 5) + ((long03 & 0x1FF) >> 4); buffer[i][6] = ((long03 & 0x1FF) << 4) + ((lat03 & 0xFF) >> 4); buffer[i][7] = ((lat03 & 0xFF) << 4) + ((label03 & 0x03) << 2); printf("buffer[0]: --- %x\n", (byte)buffer[i][0]); printf("buffer[1]: --- %x\n", (byte)buffer[i][1]); printf("buffer[2]: --- %x\n", (byte)buffer[i][2]); printf("buffer[3]: --- %x\n", (byte)buffer[i][3]); printf("buffer[4]: --- %x\n", (byte)buffer[i][4]); printf("buffer[5]: --- %x\n", (byte)buffer[i][5]); printf("buffer[6]: --- %x\n", (byte)buffer[i][6]); printf("buffer[7]: --- %x\n", (byte)buffer[i][7]); } cout << "sizeof(buffer): " << sizeof(buffer) << " Byte..." << endl; return buffer[0]; }
注意
1.如何确定CAN协议的格式,特别是信号的范围、精度以及比特位数;
2.浮点型数据如何变换为可以进行逻辑运算和位移操作的数据类型;
3.如何按照报文格式得到每个字节的内容,特别是位移操作;
4.如何将报文内容正确输出方便查看;
5.原始数据可能越界,应该在转换为报文数据之前对原始数据进行越界处理;
6.转换为CAN报文过程中的各个操作符号的优先级;
完
各美其美,美美与共,不和他人作比较,不对他人有期待,不批判他人,不钻牛角尖。
心正意诚,做自己该做的事情,做自己喜欢做的事情,安静做一枚有思想的技术媛。
版权声明,转载请注明出处:https://www.cnblogs.com/happyamyhope/
心正意诚,做自己该做的事情,做自己喜欢做的事情,安静做一枚有思想的技术媛。
版权声明,转载请注明出处:https://www.cnblogs.com/happyamyhope/
分类:
c/c++


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 如何编写易于单元测试的代码
· 10年+ .NET Coder 心语,封装的思维:从隐藏、稳定开始理解其本质意义
· .NET Core 中如何实现缓存的预热?
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 地球OL攻略 —— 某应届生求职总结
· 周边上新:园子的第一款马克杯温暖上架
· Open-Sora 2.0 重磅开源!
· 提示词工程——AI应用必不可少的技术
· .NET周刊【3月第1期 2025-03-02】