
opencv-python教程学习系列7-opencv图像基本操作
前言
opencv-python教程学习系列记录学习python-opencv过程的点滴,本文主要介绍图像的基本操作,坚持学习,共同进步。
系列教程参照OpenCV-Python中文教程;
系统环境
系统:win7_x64;
python版本:python3.5.2;
opencv版本:opencv3.3.1;
内容安排
1.知识点介绍;
2.测试代码;
具体内容
1.知识点介绍;
使用的库包含cv2、numpy和matplotlib,包含修改图像像素、获取图像属性、提取ROI、拆分合并通道、图像填充等内容;
1.1 获取并修改图像像素;
1)读取一副图像,根据像素的行和列的坐标获取它的像素值,返回RGB的值,灰度图则返回灰度值;图像中的坐标是从0开始计数的。
1 2 3 4 5 6 | px=img[100,100]#某坐标对应的像素值print(px)blue = img[100,100,0]#数字0表示选择BGR通道print(blue)img[101,101]=[235,255,255]print(img[101,101]) |
2)numpy是经过优化了的进行快速矩阵运算的包,不推荐逐个获取像素值并修改,能矩阵运算就不要用循环。
建议使用numpy的array.item()和array.itemset()函数。但是返回是标量,如果想获得所有RGB的值,需要使用array.item()分割他们。
1 2 3 4 5 | #numpyprint(img[10, 10])print(img.item(10,10,2))img.itemset((10,10,2),100)print(img.item(10,10,2)) |
1.2 获取图像属性,包括行、列、通道数目、图像数据类型、像素数目等;
image.shape - 获取图像的形状,返回值是一个包含行数/列数/通道数的元组,如果图像是灰度图,返回值仅有行数和列数,
可通过检查返回值可以判断是灰度图还是彩色图;
image.size - 获取图像的像素数目;
img.dtype - 图像的数据类型,在debug时很重要,因为OpenCV-Python代码中经常出现数据类型的不一致;
1 | print(img.dtype) |
1.3 图像ROI,对图像的特定区域操作。ROI是使用numpy索引来获得的。要先知道图像尺寸,以及要移动的图像的像素坐标,可以使用matplotlib!!
1 | ball =img[300:350,230:300] |
1.4 拆分及合并图像通道,cv2.split()是比较耗时的操作,能用numpy就尽量使用。
1 2 3 4 | r,g,b=cv2.split(img)#拆分img=cv2.merge([r,g,b])#合并b=img[:,:,0]#拆分b通道img[:,:,2]=0#使用numpy索引使所有红色通道值都为0 |
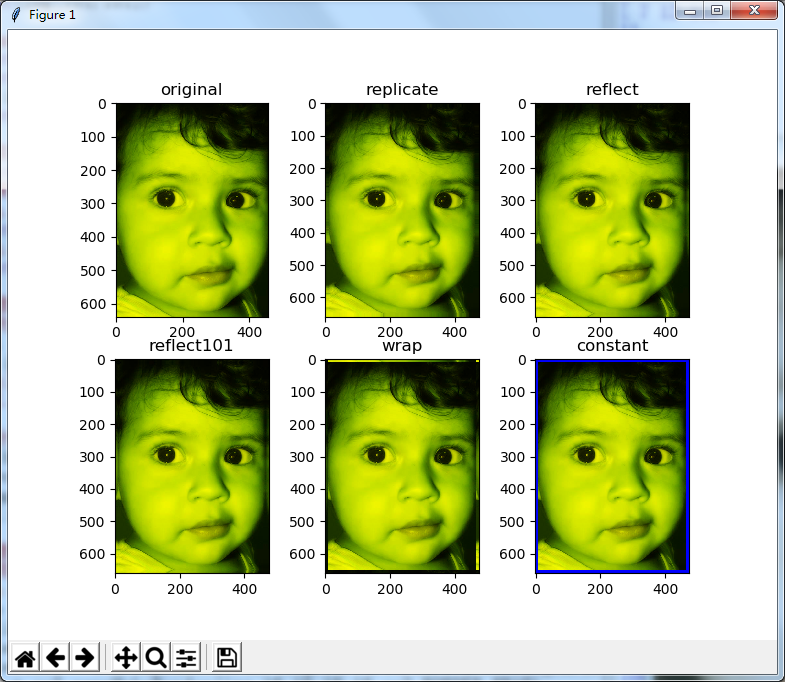
1.5 图像扩边(填充),使用cv2.copyMakeBorder()函数。这经常在卷积运算或0填充时被用到;
具体的参数有输入图像、上下左右对应边界的像素数目、边界类型;
cv2.BORDER_CONSTANT添加有颜色的常数值边界,还需要下一个参数(value);
cv2.BORDER_REFLIECT边界元素的镜像。例如:fedcba | abcdefgh | hgfedcb;
cv2.BORDER_101或者cv2.BORDER_DEFAULT跟上面一样,但稍作改动,例如:gfedcb | abcdefgh | gfedcba;
cv2.BORDER_REPLICATE复后一个元素。例如: aaaaaa| abcdefgh|hhhhhhh;
cv2.BORDER_WRAP 不知怎么了, 就像样: cdefgh| abcdefgh|abcdefg;
value边界颜色;
1 2 3 | blue = [0,0,255]#分别表示RGB通道;constant = cv2.copyMakeBorder(img,10,10,10,10,cv2.BORDER_CONSTANT,value=blue)plt.subplot(236),plt.imshow(constant,'gray'),plt.title('constant') |
2.测试代码;
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 | import cv2import numpyimg = cv2.imread('test.jpg')px=img[100,100]#某坐标对应的像素值print(px)blue = img[100,100,0]#0表示BGR通道数print(blue)img[101,101]=[235,255,255]print(img[101,101])#numpyprint(img[10, 10])print(img.item(10,10,2))img.itemset((10,10,2),100)print(img.item(10,10,2))#获取图像属性(图像属性包括:行,列,通道,图像数据类型,像素数目等)print(img.shape)#img.shape可以获得图像的形状,返回值是一个包含行数/列数/通道数的元组#如果图像是灰度图,返回值仅有行数和列数,所以通过检查返回值可以判断是灰度图还是彩色图#img.size可以返回图像的像素数目print(img.size)#img.dtype返回图像的数据类型,在debug时很重要,因为OpenCV-Python代码中经常出现数据类型的不一致print(img.dtype)#图像ROI,对图像的特定区域操作。ROI是使用numpy索引来获得的。#要先知道图像尺寸,以及你要移动的图像的像素坐标,可以使用matplotlib!!ball =img[300:350,230:300]cv2.imshow('image',img)#显示图像img[500:550,300:370]=ballcv2.imshow('imageROI',img)#显示图像#拆分及合并图像通道,cv2.split()是比较耗时的操作,能用numpy就尽量使用。r,g,b=cv2.split(img)#拆分img=cv2.merge([r,g,b])#合并b=img[:,:,0]#拆分b通道img[:,:,2]=0#使用numpy索引使所有红色通道值都为0#图像扩边(填充)#使用cv2.copyMakeBorder()函数。这经常在卷积运算或0填充时被用到;from matplotlib import pyplot as pltblue = [0,0,255]#分别表示RGB通道;replicate = cv2.copyMakeBorder(img,10,10,10,10,cv2.BORDER_REPLICATE)reflect = cv2.copyMakeBorder(img,10,10,10,10,cv2.BORDER_REFLECT)reflect101 = cv2.copyMakeBorder(img,10,10,10,10,cv2.BORDER_REFLECT101)wrap = cv2.copyMakeBorder(img,10,10,10,10,cv2.BORDER_WRAP)constant = cv2.copyMakeBorder(img,10,10,10,10,cv2.BORDER_CONSTANT,value=blue)plt.subplot(231),plt.imshow(img,'gray'),plt.title('original')plt.subplot(232),plt.imshow(replicate,'gray'),plt.title('replicate')plt.subplot(233),plt.imshow(reflect,'gray'),plt.title('reflect')plt.subplot(234),plt.imshow(reflect101,'gray'),plt.title('reflect101')plt.subplot(235),plt.imshow(wrap,'gray'),plt.title('wrap')plt.subplot(236),plt.imshow(constant,'gray'),plt.title('constant')plt.show() |
测试结果显示
参考
1. opencv图像基本操作;
完
心正意诚,做自己该做的事情,做自己喜欢做的事情,安静做一枚有思想的技术媛。
版权声明,转载请注明出处:https://www.cnblogs.com/happyamyhope/


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 如何编写易于单元测试的代码
· 10年+ .NET Coder 心语,封装的思维:从隐藏、稳定开始理解其本质意义
· .NET Core 中如何实现缓存的预热?
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 地球OL攻略 —— 某应届生求职总结
· 周边上新:园子的第一款马克杯温暖上架
· Open-Sora 2.0 重磅开源!
· 提示词工程——AI应用必不可少的技术
· .NET周刊【3月第1期 2025-03-02】