

【matlab工具箱使用】matlab工具箱标定相机
前言
印象中之前使用python和matlab都做过相机标定工作,只是没有记录,最近使用matlab工具箱记录下操作步骤。
操作步骤

1.打印一张棋盘格,把它贴在一个平面上,作为标定物,同时记录棋盘格的实际大小。
2.通过调整标定物或摄像机的方向,为标定物拍摄一些不同方向的照片。
3.从照片中提取棋盘格角点。
4.估算理想无畸变的情况下,五个内参和六个外参。
在假设透镜畸变为零的情况下,求解内外参。 利用非线性最小二乘极小化(Levenberg-Marquardt)同时估计包括畸变系数在内的所有参数。 使用第一步的解作为内、外参数的初始估计。然后将畸变系数的初始估计值设为零。
5.应用最小二乘法估算实际存在径向畸变下的畸变系数
具体操作步骤
step1:启动matlab,在APPS中搜索camera calibrator;
step2: 加载标定板拍摄图片;
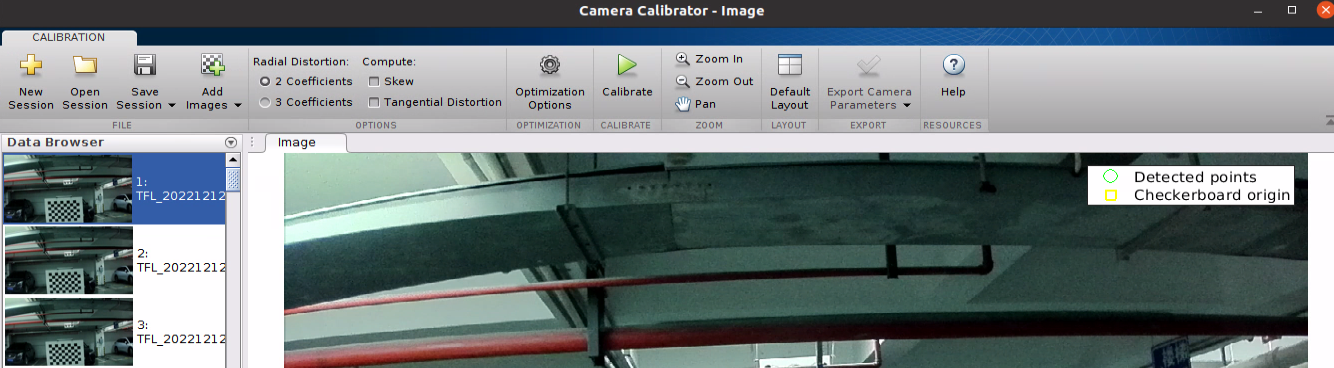
step3: 输入棋盘格每格的尺寸大小,单位是mm;
step4: 选择需要计算的参数,点击Calibration,开始标定;

step5: 得到标定结果(平均误差小于0.5即可,如果大于0.5,多采一些图,再次标定);
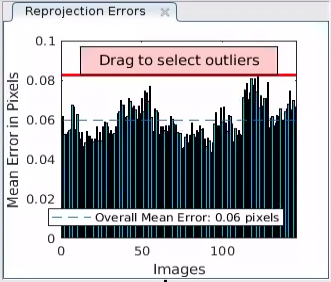
step6: 查看标定结果和生成程序;

标定结果
cameraParams = cameraParameters with properties: Camera Intrinsics IntrinsicMatrix: [3×3 double] FocalLength: [1.3097e+03 1.3180e+03] PrincipalPoint: [671.4361 399.7834] Skew: 1.9323 RadialDistortion: [-0.4668 0.1950 -0.0949] TangentialDistortion: [-0.0026 -6.1137e-04] ImageSize: [720 1280] Camera Extrinsics RotationMatrices: [3×3×145 double] TranslationVectors: [145×3 double] Accuracy of Estimation MeanReprojectionError: 0.0598 ReprojectionErrors: [54×2×145 double] ReprojectedPoints: [54×2×145 double] Calibration Settings NumPatterns: 145 WorldPoints: [54×2 double] WorldUnits: 'millimeters' EstimateSkew: 1 NumRadialDistortionCoefficients: 3 EstimateTangentialDistortion: 1estimationErrors = cameraCalibrationErrors with properties: IntrinsicsErrors: [1×1 intrinsicsEstimationErrors] ExtrinsicsErrors: [1×1 extrinsicsEstimationErrors] |
自动生成matlab脚本;
% Auto-generated by cameraCalibrator app on 12-Dec-2022%-------------------------------------------------------imageFileNames = {'/home/xxx/workspace/utils/camera_calib/output_20221212T103356_camera_calib_fov60/TFL_20221212T103406_00000.png',... '/home/xxx/workspace/utils/camera_calib/output_20221212T103356_camera_calib_fov60/TFL_20221212T103545_00001.png',... '/home/xxx/workspace/utils/camera_calib/output_20221212T103356_camera_calib_fov60/TFL_20221212T103549_00002.png',...}% Define images to process% Detect checkerboards in images[imagePoints, boardSize, imagesUsed] = detectCheckerboardPoints(imageFileNames);imageFileNames = imageFileNames(imagesUsed);% Read the first image to obtain image sizeoriginalImage = imread(imageFileNames{1});[mrows, ncols, ~] = size(originalImage);% Generate world coordinates of the corners of the squaressquareSize = 100; % in units of 'millimeters'worldPoints = generateCheckerboardPoints(boardSize, squareSize);% Calibrate the camera[cameraParams, imagesUsed, estimationErrors] = estimateCameraParameters(imagePoints, worldPoints, ... 'EstimateSkew', true, 'EstimateTangentialDistortion', true, ... 'NumRadialDistortionCoefficients', 3, 'WorldUnits', 'millimeters', ... 'InitialIntrinsicMatrix', [], 'InitialRadialDistortion', [], ... 'ImageSize', [mrows, ncols]);% View reprojection errorsh1=figure; showReprojectionErrors(cameraParams);% Visualize pattern locationsh2=figure; showExtrinsics(cameraParams, 'CameraCentric');% Display parameter estimation errorsdisplayErrors(estimationErrors, cameraParams);% For example, you can use the calibration data to remove effects of lens distortion.undistortedImage = undistortImage(originalImage, cameraParams);% See additional examples of how to use the calibration data. At the prompt type:% showdemo('MeasuringPlanarObjectsExample')% showdemo('StructureFromMotionExample') |
参考
1. Matlab工具箱标定_qingfengxiaosong的博客-CSDN博客_matlab标定工具箱;
完
各美其美,美美与共,不和他人作比较,不对他人有期待,不批判他人,不钻牛角尖。
心正意诚,做自己该做的事情,做自己喜欢做的事情,安静做一枚有思想的技术媛。
版权声明,转载请注明出处:https://www.cnblogs.com/happyamyhope/
心正意诚,做自己该做的事情,做自己喜欢做的事情,安静做一枚有思想的技术媛。
版权声明,转载请注明出处:https://www.cnblogs.com/happyamyhope/
分类:
matlab


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· winform 绘制太阳,地球,月球 运作规律
· 超详细:普通电脑也行Windows部署deepseek R1训练数据并当服务器共享给他人
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· AI 智能体引爆开源社区「GitHub 热点速览」
· 写一个简单的SQL生成工具
2018-12-14 219. Contains Duplicate II
2018-12-14 217. Contains Duplicate
2018-12-14 206. Reverse Linked List