
【摄像头基础】Global Shutter(全局快门)与Rolling Shutter(卷帘快门)的区别与比较
由于红外补光灯的爆闪,所以一般DMS会用global shutter的sensor,而不是rolling shutter的。
全局快门 (global shutter),其特点是sensor 上所有像素是在同一瞬间全部开始曝光的,因此sensor 采集的是物体在同一时间点的画面。
卷帘曝光的最显著特点是每一行像素开始曝光的时间点是不同的,是与像素位置有关的的函数。当画面中存在运动的物体时,物体在曝光过程中空间位置在不断变化,画面就发生变形,物体速度越快,变形就越严重。
前视ADAS和其他自动驾驶视觉系统,需要LFM和HDR;
对于DMS,需要GS(global shutter)、940nm波长的高近红外(NIR)量子效率(QE)、小尺寸和低功耗;
ISP(图像信号处理器),针对图像处理的元件,包括增益控制、白平衡、噪声控制、曝光控制等技术;
LFM(LED闪烁抑制,LED Flicker Mitigation),红绿灯检测需要。实现LFM(LED flicker mitigation,LED闪烁抑制)的基本思路是优化曝光时间点或时长,使图像传感器在每帧中捕获至少一次LED工作状态。目前主流LFM方案有四种技术路径,包括时间多路传输、空间多路复用、较大的全井产能和列阵摄像机。
LED闪烁,是由LED驱动方式产生的现象,LED驱动通常采用脉冲调制的方式,如果LED驱动频率与传感器曝光频率不一致,就会出现曝光时间与LED开启时间错位的情况,从而采集到明暗错误或持续闪烁的图像信息。
LED闪烁是指摄像头拍摄到的LED灯图像忽明忽暗的闪烁现象,其本质是摄像头曝光采样周期不同于LED灯的脉冲周期导致的。
LED灯的驱动通常采用脉冲调制的方式,在每个脉冲周期内实现一次亮暗交替,驱动频率往往高于90Hz(即脉冲周期小于11ms)以保证人眼不会察觉到光线闪烁。如果摄像头的曝光时间较短,则曝光时间可能在某一帧中对应LED灯通电期,却在下一帧中对应LED灯关灭期,最终形成LED闪烁。
HDR(High Dynamic Range Imaging,高动态范围图像),即成像时能同时看清场景中较暗和较亮的部分,大像素通过在单个像素上容纳更多的电子,可以有效地保留图像信息,从而实现高动态范围;
动态范围(dynamic range, DR)是图像传感器能够同时捕捉同一场景中亮处与暗处的能力。在现实中,强光源的照射使高亮度区域及阴影、逆光等相对亮度较低的区域经常出现在同一场景中,若传感器的动态范围较小,摄像机输出的图像会出现明亮区域因曝光过度成为白色,或黑暗区域因曝光不足成为黑色,导致图像细节丢失。针对以上问题的解决方案是HDR,即提高传感器动态范围以保证摄像头可以在任何光线下真实清晰成像。
大尺寸像素,在低光照下依然保证较高的成像清晰度,大像素能解决昏暗环境叠加短曝光时间给车载摄像头带来的挑战。
大像素具备更高的感光能力及光子容纳能力,可以有效拓宽CIS的动态范围。在低亮度条件下,大像素更大的感光面能捕获到更多的光子,使其在相同曝光时间下获得更多图像信息;同时,大像素可以容纳更多的电子,避免由于过曝导致图片亮处细节丢失,由此实现在单次曝光过程中获取高动态范围的图像信息,以减免传统HDR技术中因时间延迟造成的伪影,实现高对比度场景下的优质成像。
车载摄像头的核心诉求是实现自动驾驶的行驶安全,高像素对视频摄像的增益较小。车载摄像头的目的是在复杂环境下实现对周围环境及车辆状态的正确感知和探测,在成像清晰度能够满足感知、探测的需求后,更高的清晰度在提升成本的同时,所带来的实用价值较低。
同时,车载摄像头应用于视频拍摄,800万像素已经可以支持4K的超高清视频流,而对于只需要做环境感知而不需要测距的摄像头来说,720P(约100万像素)或1080P(约200万像素)的车载CIS已经能够满足需求。
CMOS Image Sensor (CIS) ;
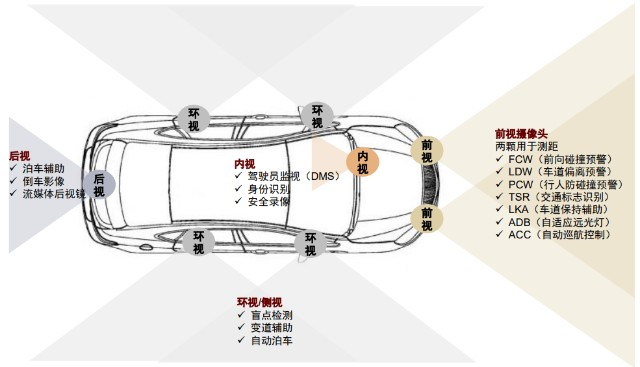
理想ADAS系统的8颗摄像头布局
不同分辨率视频流的像素要求

车载CIS和消费级CIS对比

不同曝光时间下夜间车辆成像

参考
1. Global Shutter(全局快门)与Rolling Shutter(卷帘快门)的区别与比较;
2. 中金 | 汽车传感器:车载摄像迎风口,六问六答寻真章;
3. 【自动驾驶-感知-红绿灯】红绿灯识别知识点_二十四桥下一句的博客-CSDN博客;
4. Understanding CMOS Image Sensor @ 刘斯宁;
完
心正意诚,做自己该做的事情,做自己喜欢做的事情,安静做一枚有思想的技术媛。
版权声明,转载请注明出处:https://www.cnblogs.com/happyamyhope/


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 如何编写易于单元测试的代码
· 10年+ .NET Coder 心语,封装的思维:从隐藏、稳定开始理解其本质意义
· .NET Core 中如何实现缓存的预热?
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 地球OL攻略 —— 某应届生求职总结
· 周边上新:园子的第一款马克杯温暖上架
· Open-Sora 2.0 重磅开源!
· 提示词工程——AI应用必不可少的技术
· .NET周刊【3月第1期 2025-03-02】