动态规划总结 【分类1-基础模型】
动态规划总结 【分类1-基础模型】
1.线性DP
1.1 综述
线性动态规划问题,就是说每个子问题的阶段以线性方式递推的动态规划问题。
这种问题是动态规划的基础。一般来说,如果不是对状态表示层面开展优化,那么大多数问题都是线性动态规划,故这就成了最基本的动态规划问题。
2.背包DP
好,这个内容已经写过一次了,现在复制过来并进行了改进
1.01背包
所以你应该想到,这个问题有变量与答案相关:价值,有变量与限制相关:物品体积、背包;有变量与此无关,可以选择作为阶段的变量:物品数
这样应该就清楚了。读者应该已经知道方程是什么了。
优化空间复杂度
方法你应该已知,要注意的是,如果不使用倒序循环,就会出现第i阶段向第i阶段转移的问题,这会导致重复考虑物品。
2.完全背包
假如我们允许从第i个已经考虑物品i的阶段转移到自己,那么就相当于允许放无限物品i。
这仍然满足了“无后效性”的要求,因为在阶段内还是有序从已经计算转移到还没有计算的。
3.多重背包
这题目和完全背包问题很类似。基本的方程只需将完全背包问题的方程略 微一改即可。只要把物品直接拆分成Mi件就好,实现上只要加一重循环。
以上是书上说的。笔者实际上在写稿的时候发现一件好玩并且有教育意义的事。
代码1:
#include<bits/stdc++.h>
using namespace std;
const int N=10000;
int f[N],c[N],v[N],w[N],n,m;
int main(){
cin>>n>>m;
for(int i=1;i<=n;i++){
cin>>w[i]>>v[i]>>c[i];
}
for(int i=1;i<=n;i++){
for(int j=m;j>=0;j--){
for(int k=0;k<=c[i]&&k*w[i]<=j;k++){
f[j]=max(f[j],f[j-k*w[i]]+k*v[i]);
}
}
}
cout<<f[m];
return 0;
}代码2:
#include<bits/stdc++.h>
using namespace std;
const int N=10000;
int f[N],c[N],v[N],w[N],n,m;
int main(){
cin>>n>>m;
for(int i=1;i<=n;i++){
cin>>w[i]>>v[i]>>c[i];
}
memset(f,0xcf,sizeof f);
f[0]=0;
for(int i=1;i<=n;i++){
for(int k=1;k<=c[i];k++){
for(int j=m;j>=w[i];j--){
f[j]=max(f[j],f[j-w[i]]+v[i]);
}
}
}
int ans=0;
for(int i=0;i<=m;i++) ans=max(ans,f[i]);
cout<<ans;
return 0;
}这两个代码都能通过AcWing上的模板题。但是仔细看看这两个有多少不同呢。
请注意整个程序从初始化到输出答案都是动态规划的组成部分,请不要漏掉其中一些。
好吧上面那个是我看了书上代码突发奇想又写的。下面那个是书上的。
其实这两份代码有很重要的区别:他们的状态设计甚至不同。
上面那份:f[i]代表容量为i的背包可以获得最多多大的价值?
下面那份:f[i]代表已经装填了i的背包最大价值是多少?
那么,如果是下面那样设计,ok,但是这就要修改一些地方:
-
初始化除了0之外要全为-inf,因为空间i不装满在这种情况下非法
-
把第二层k改成1,这里是表示n个物品
-
最后要扫一遍,很明显吧
所以说,写DP,一定要先根据题目里相关变量确定状态表示,务必扣合,否则就会出现错误
优化
关于拆分,我们隔壁树状数组这个给我们做了一个很好的示范。
但是,如果有一个物体,我们必须把它拆出1,2,3...,Ci个才行。
所以我们知道,这些数一个一个都是可以由某些二的次幂构成的。
但是我们要保证不漏和不超范围,就只能找到这样一个数,使得:
读者自证不难。
4.分组背包
这个问题变成了每组物品有若干种策略:是选择本组的某一件,还是一件 都不选。
也就是说,依次看看每一组中的物品是否加入。
3. 区间DP
3.1 综述
区间DP求解跟区间有关的动态规划问题。通常来说,这类问题要满足区间可加性,就是要容易从两个子区间合并,这跟线段树的要求是一样的。
4.树形DP
4.1 综述
树形DP在树形结构上求解关于:子树、路径之类的问题。还有一些问题利用树形结构表达依赖等关系。
前面已经提到动态规划的转移图形,这里就更加特殊,变成了一棵树。我们可以选择从上自下更新,也可以自下而上转移。
4.2 有依赖的树形背包
转化为分组背包求解。不再赘述。
4.3 二次扫描与换根法
很多时候,题目没有给定树形的根,那么,我们难道就必须对于每个树根进行DP了吗?
注意到实际上对于每一个节点,从这个节点出发必然可以遍历整个状态空间。如果树根对答案来说很重要,那么当然是因为子问题中涉及到子树相关的内容(关心形状),那么经过一次计算,我们实际上可算出所有的点在这个根的情况下的子树里的答案,这些答案就被浪费了,造成冗余的计算。
二次扫描与换根法就是建立在这样的发现上,普遍地说:
-
先进行第一次DP,从任意一个根x出发,求出
-
再进行一次扫描,从根x出发,求出
5 计数DP
5.1 综述
计数DP,是用来求解计数类问题的动态规划。所以说,要求做到“不重不漏”。
一般情况下,我们求解这类问题,就是同时应用加法原理和乘法原理。
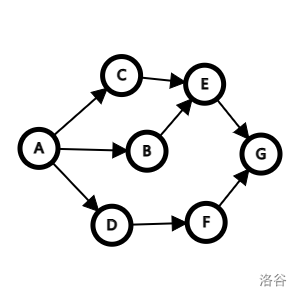
如图,比如说f[x]代表达到状态x的方案数,那么
在大多数情况下,DP都能完整地遍历状态空间,我们这类主要考虑如何避免重复以及高效计算。总结来说,就是要考虑每一个方案如果不一样,那么有什么一定不同。这种思想在下面的例题中还可窥见一二。
6 数位DP
6.1 综述
数位DP,就是要统计满足某些条件的数字。我们很容易用动态规划预处理出一些信息,然后利用这些信息拼凑答案。
本文来自博客园,作者:haozexu,转载请注明原文链接:https://www.cnblogs.com/haozexu/p/18281766


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· DeepSeek 开源周回顾「GitHub 热点速览」
· 物流快递公司核心技术能力-地址解析分单基础技术分享
· .NET 10首个预览版发布:重大改进与新特性概览!
· AI与.NET技术实操系列(二):开始使用ML.NET
· .NET10 - 预览版1新功能体验(一)