AutoSAR基础_COM
模块详解:
- COM: 从应用层传下来数据首先就进入这里,应用层无需关心收发的数据是通过什么总线传输的,应用只需要将它传输给COM即可。这些收发的数据是由用户的DBC文件或者ARXML文件已经定义好了的(这些文件一般OEM整车厂在整车设计的时候就做出来了,里面有总线的网络拓扑图,每个传输的数据应该走什么总线都有定义,所以应用层是无需关心的,只需要优雅的将数据和COM交换即可)。同样,COM上传的数据也是很单纯的数据,里面没有这个数据是什么总线上传的这样无意义的信息,应用层关心的是这个数据的实际意义和数据大小。所以COM主要就起了一个信号接口和网关的作用
- PDU Router: PDU——Protocol Data Unit,协议数据单元。这个模块的功能就是将COM下发的信号数据分配到相应的协议总线上去;或者将不同的协议变成同一信号上传给COM。
- IPDU Mux: 用于解析一些特殊的协议,比如CAN FD或者用户自定义的一些协议。就是起了一个统一CAN ID,不同信号Layout的作用
- CAN Tp: 分包数据传输与错误检测,一般来说只有在诊断的时候才会使用
- CAN Interface: 与硬件已经无关了,与硬件相关的是下面两个Driver做的工作,这个Interface主要可以配置收发队列;组帧(FlexRay);管理时间触发总线的调度表(LIN, FlexRay)
- CAN Driver: 就是MCAL中对主芯片上CAN模块的驱动封装
- Trcv Driver: Trcv——Transceiver的缩写,就是收发器驱动的意思。如果是外置CAN收发器,这里就要用到Trcv Driver这个驱动,而非CAN Driver。
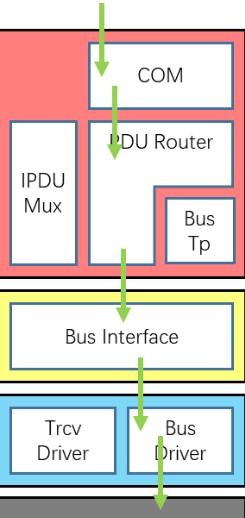
发送:
- 应用层Send一个数据进COM
- COM写信号进PDU Buffer中
- PDU被PDU Router立刻发送或按周期发送(每个PDU都有一个独立的ID),之后PDU Router辨认总线种类,并把PDU发向不同的下级模块
- Interface根据不同的通道,把报文写入不同的队列
- Driver根据报文的优先级立刻发送报文
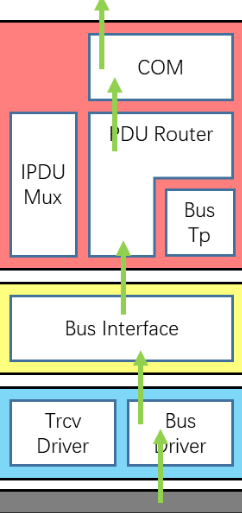
接收:
中断或者循环接收(这里假设为中断):
- 硬件接收报文
- 由Driver发出Rx中断(函数),之后通过RxIndication,数据被传递到Interface
- 传递到PDU Router
- 传递到COM(如果SWCs使用Data ReceptionTrigger,就通知RTE;否则暂存到Buffer中)
- 信号被RTE读取,然后应用层读取