
GMM+Kalman Filter+Blob 目标跟踪
转 http://www.cnblogs.com/YangQiaoblog/p/5462453.html
==========图片版==============================================================================
=====================================================================================
最近学习了一下多目标跟踪,看了看MathWorks的关于Motion-Based Multiple Object Tracking的Documention。
程序来自matlab的CV工具箱Computer Vision System Toolbox。这种方法用于静止背景下的多目标检测与跟踪。
程序可以分为两部分,1.每一帧检测运动objects;
2.实时的将检测得到的区域匹配到相同一个物体;
检测部分,用的是基于高斯混合模型的背景剪除法;
参考链接:http://blog.pluskid.org/?p=39
所谓单高斯模型,就是用多维高斯分布概率来进行模式分类

其中μ用训练样本均值代替,Σ用样本方差代替,X为d维的样本向量。通过高斯概率公式就可以得出类别C属于正(负)样本的概率。
而混合高斯模型(GMM)就是数据从多个高斯分布中产生的。每个GMM由K个高斯分布线性叠加而成。
P(x)=Σp(k)*p(x|k) 相当于对各个高斯分布进行加权(权系数越大,那么这个数据属于这个高斯分布的可能性越大)
而在实际过程中,我们是在已知数据的前提下,对GMM进行参数估计,具体在这里即为图片训练一个合适的GMM模型。
那么在前景检测中,我们会取静止背景(约50帧图像)来进行GMM参数估计,进行背景建模。分类域值官网取得0.7,经验取值0.7-0.75可调。这一步将会分离前景和背景,输出为前景二值掩码。
然后进行形态学运算,并通过函数返回运动区域的centroids和bboxes,完成前景检测部分。
跟踪部分,用的是卡尔曼滤波。卡尔曼是一个线性估计算法,可以建立帧间bboxs的关系。
跟踪分为5种状态: 1,新目标出现 2,目标匹配 3,目标遮挡 4,目标分离 5,目标消失。
卡尔曼原理在这儿我就不贴了,网上很多。
状态方程: X(k+1)=A(K+1,K)X(K)+w(K) 其中 X(k)=[x(k),y(k),w(k),h(k),v(k)], x,y,w,h,分别表示bboxs的横纵坐标,长,宽。
观测方程: Z(k)=H(k)X(k)+v(k) w(k), v(k),不相关的高斯白噪声。
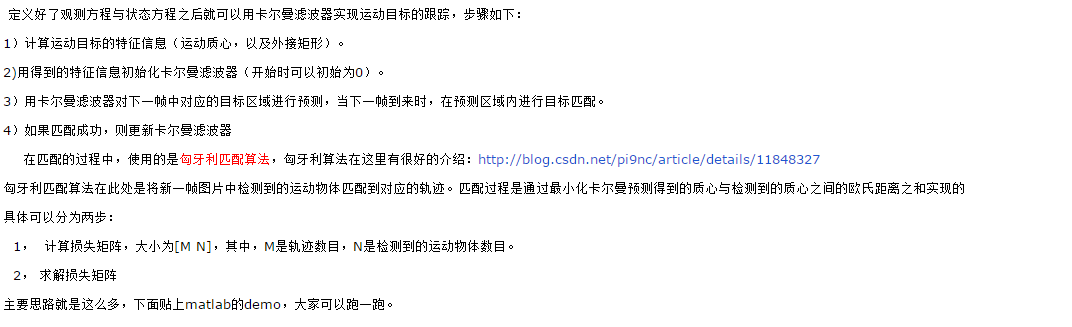
定义好了观测方程与状态方程之后就可以用卡尔曼滤波器实现运动目标的跟踪,步骤如下:
1)计算运动目标的特征信息(运动质心,以及外接矩形)。
2)用得到的特征信息初始化卡尔曼滤波器(开始时可以初始为0)。
3)用卡尔曼滤波器对下一帧中对应的目标区域进行预测,当下一帧到来时,在预测区域内进行目标匹配。
4)如果匹配成功,则更新卡尔曼滤波器
在匹配的过程中,使用的是匈牙利匹配算法,匈牙利算法在这里有很好的介绍:http://blog.csdn.net/pi9nc/article/details/11848327
匈牙利匹配算法在此处是将新一帧图片中检测到的运动物体匹配到对应的轨迹。匹配过程是通过最小化卡尔曼预测得到的质心与检测到的质心之间的欧氏距离之和实现的
具体可以分为两步:
1, 计算损失矩阵,大小为[M N],其中,M是轨迹数目,N是检测到的运动物体数目。
2, 求解损失矩阵
主要思路就是这么多,下面贴上matlab的demo,大家可以跑一跑。
function multiObjectTracking() % create system objects used for reading video, detecting moving objects, % and displaying the results obj = setupSystemObjects(); %初始化函数 tracks = initializeTracks(); % create an empty array of tracks %初始化轨迹对象 nextId = 1; % ID of the next track % detect moving objects, and track them across video frames while ~isDone(obj.reader) frame = readFrame(); %读取一帧 [centroids, bboxes, mask] = detectObjects(frame); %前景检测 predictNewLocationsOfTracks(); %根据位置进行卡尔曼预测 [assignments, unassignedTracks, unassignedDetections] = ... detectionToTrackAssignment(); %匈牙利匹配算法进行匹配 updateAssignedTracks();%分配好的轨迹更新 updateUnassignedTracks();%未分配的轨迹更新 deleteLostTracks();%删除丢掉的轨迹 createNewTracks();%创建新轨迹 displayTrackingResults();%结果展示 end %% Create System Objects % Create System objects used for reading the video frames, detecting % foreground objects, and displaying results. function obj = setupSystemObjects() % Initialize Video I/O % Create objects for reading a video from a file, drawing the tracked % objects in each frame, and playing the video. % create a video file reader obj.reader = vision.VideoFileReader('atrium.avi'); %读入视频 % create two video players, one to display the video, % and one to display the foreground mask obj.videoPlayer = vision.VideoPlayer('Position', [20, 400, 700, 400]); %创建两个窗口 obj.maskPlayer = vision.VideoPlayer('Position', [740, 400, 700, 400]); % Create system objects for foreground detection and blob analysis % The foreground detector is used to segment moving objects from % the background. It outputs a binary mask, where the pixel value % of 1 corresponds to the foreground and the value of 0 corresponds % to the background. obj.detector = vision.ForegroundDetector('NumGaussians', 3, ... %GMM进行前景检测,高斯核数目为3,前40帧为背景帧,域值为0.7 'NumTrainingFrames', 40, 'MinimumBackgroundRatio', 0.7); % Connected groups of foreground pixels are likely to correspond to moving % objects. The blob analysis system object is used to find such groups % (called 'blobs' or 'connected components'), and compute their % characteristics, such as area, centroid, and the bounding box. obj.blobAnalyser = vision.BlobAnalysis('BoundingBoxOutputPort', true, ... %输出质心和外接矩形 'AreaOutputPort', true, 'CentroidOutputPort', true, ... 'MinimumBlobArea', 400); end %% Initialize Tracks % The |initializeTracks| function creates an array of tracks, where each % track is a structure representing a moving object in the video. The % purpose of the structure is to maintain the state of a tracked object. % The state consists of information used for detection to track assignment, % track termination, and display. % % The structure contains the following fields: % % * |id| : the integer ID of the track % * |bbox| : the current bounding box of the object; used % for display % * |kalmanFilter| : a Kalman filter object used for motion-based % tracking % * |age| : the number of frames since the track was first % detected % * |totalVisibleCount| : the total number of frames in which the track % was detected (visible) % * |consecutiveInvisibleCount| : the number of consecutive frames for % which the track was not detected (invisible). % % Noisy detections tend to result in short-lived tracks. For this reason, % the example only displays an object after it was tracked for some number % of frames. This happens when |totalVisibleCount| exceeds a specified % threshold. % % When no detections are associated with a track for several consecutive % frames, the example assumes that the object has left the field of view % and deletes the track. This happens when |consecutiveInvisibleCount| % exceeds a specified threshold. A track may also get deleted as noise if % it was tracked for a short time, and marked invisible for most of the of % the frames. function tracks = initializeTracks() % create an empty array of tracks tracks = struct(... 'id', {}, ... %轨迹ID 'bbox', {}, ... %外接矩形 'kalmanFilter', {}, ...%轨迹的卡尔曼滤波器 'age', {}, ...%总数量 'totalVisibleCount', {}, ...%可视数量 'consecutiveInvisibleCount', {});%不可视数量 end %% Read a Video Frame % Read the next video frame from the video file. function frame = readFrame() frame = obj.reader.step();%激活读图函数 end %% Detect Objects % The |detectObjects| function returns the centroids and the bounding boxes % of the detected objects. It also returns the binary mask, which has the % same size as the input frame. Pixels with a value of 1 correspond to the % foreground, and pixels with a value of 0 correspond to the background. % % The function performs motion segmentation using the foreground detector. % It then performs morphological operations on the resulting binary mask to % remove noisy pixels and to fill the holes in the remaining blobs. function [centroids, bboxes, mask] = detectObjects(frame) % detect foreground mask = obj.detector.step(frame); % apply morphological operations to remove noise and fill in holes mask = imopen(mask, strel('rectangle', [3,3]));%开运算 mask = imclose(mask, strel('rectangle', [15, 15])); %闭运算 mask = imfill(mask, 'holes');%填洞 % perform blob analysis to find connected components [~, centroids, bboxes] = obj.blobAnalyser.step(mask); end %% Predict New Locations of Existing Tracks % Use the Kalman filter to predict the centroid of each track in the % current frame, and update its bounding box accordingly. function predictNewLocationsOfTracks() for i = 1:length(tracks) bbox = tracks(i).bbox; % predict the current location of the track predictedCentroid = predict(tracks(i).kalmanFilter);%根据以前的轨迹,预测当前位置 % shift the bounding box so that its center is at % the predicted location predictedCentroid = int32(predictedCentroid) - bbox(3:4) / 2; tracks(i).bbox = [predictedCentroid, bbox(3:4)];%真正的当前位置 end end %% Assign Detections to Tracks % Assigning object detections in the current frame to existing tracks is % done by minimizing cost. The cost is defined as the negative % log-likelihood of a detection corresponding to a track. % % The algorithm involves two steps: % % Step 1: Compute the cost of assigning every detection to each track using % the |distance| method of the |vision.KalmanFilter| System object. The % cost takes into account the Euclidean distance between the predicted % centroid of the track and the centroid of the detection. It also includes % the confidence of the prediction, which is maintained by the Kalman % filter. The results are stored in an MxN matrix, where M is the number of % tracks, and N is the number of detections. % % Step 2: Solve the assignment problem represented by the cost matrix using % the |assignDetectionsToTracks| function. The function takes the cost % matrix and the cost of not assigning any detections to a track. % % The value for the cost of not assigning a detection to a track depends on % the range of values returned by the |distance| method of the % |vision.KalmanFilter|. This value must be tuned experimentally. Setting % it too low increases the likelihood of creating a new track, and may % result in track fragmentation. Setting it too high may result in a single % track corresponding to a series of separate moving objects. % % The |assignDetectionsToTracks| function uses the Munkres' version of the % Hungarian algorithm to compute an assignment which minimizes the total % cost. It returns an M x 2 matrix containing the corresponding indices of % assigned tracks and detections in its two columns. It also returns the % indices of tracks and detections that remained unassigned. function [assignments, unassignedTracks, unassignedDetections] = ... detectionToTrackAssignment() nTracks = length(tracks); nDetections = size(centroids, 1); % compute the cost of assigning each detection to each track cost = zeros(nTracks, nDetections); for i = 1:nTracks cost(i, :) = distance(tracks(i).kalmanFilter, centroids);%损失矩阵计算 end % solve the assignment problem costOfNonAssignment = 20; [assignments, unassignedTracks, unassignedDetections] = ... assignDetectionsToTracks(cost, costOfNonAssignment);%匈牙利算法匹配 end %% Update Assigned Tracks % The |updateAssignedTracks| function updates each assigned track with the % corresponding detection. It calls the |correct| method of % |vision.KalmanFilter| to correct the location estimate. Next, it stores % the new bounding box, and increases the age of the track and the total % visible count by 1. Finally, the function sets the invisible count to 0. function updateAssignedTracks() numAssignedTracks = size(assignments, 1); for i = 1:numAssignedTracks trackIdx = assignments(i, 1); detectionIdx = assignments(i, 2); centroid = centroids(detectionIdx, :); bbox = bboxes(detectionIdx, :); % correct the estimate of the object's location % using the new detection correct(tracks(trackIdx).kalmanFilter, centroid); % replace predicted bounding box with detected % bounding box tracks(trackIdx).bbox = bbox; % update track's age tracks(trackIdx).age = tracks(trackIdx).age + 1; % update visibility tracks(trackIdx).totalVisibleCount = ... tracks(trackIdx).totalVisibleCount + 1; tracks(trackIdx).consecutiveInvisibleCount = 0; end end %% Update Unassigned Tracks % Mark each unassigned track as invisible, and increase its age by 1. function updateUnassignedTracks() for i = 1:length(unassignedTracks) ind = unassignedTracks(i); tracks(ind).age = tracks(ind).age + 1; tracks(ind).consecutiveInvisibleCount = ... tracks(ind).consecutiveInvisibleCount + 1; end end %% Delete Lost Tracks % The |deleteLostTracks| function deletes tracks that have been invisible % for too many consecutive frames. It also deletes recently created tracks % that have been invisible for too many frames overall. function deleteLostTracks() if isempty(tracks) return; end invisibleForTooLong = 10; ageThreshold = 8; % compute the fraction of the track's age for which it was visible ages = [tracks(:).age]; totalVisibleCounts = [tracks(:).totalVisibleCount]; visibility = totalVisibleCounts ./ ages; % find the indices of 'lost' tracks lostInds = (ages < ageThreshold & visibility < 0.6) | ... [tracks(:).consecutiveInvisibleCount] >= invisibleForTooLong; % delete lost tracks tracks = tracks(~lostInds); end %% Create New Tracks % Create new tracks from unassigned detections. Assume that any unassigned % detection is a start of a new track. In practice, you can use other cues % to eliminate noisy detections, such as size, location, or appearance. function createNewTracks() centroids = centroids(unassignedDetections, :); bboxes = bboxes(unassignedDetections, :); for i = 1:size(centroids, 1) centroid = centroids(i,:); bbox = bboxes(i, :); % create a Kalman filter object kalmanFilter = configureKalmanFilter('ConstantVelocity', ... centroid, [200, 50], [100, 25], 100); % create a new track newTrack = struct(... 'id', nextId, ... 'bbox', bbox, ... 'kalmanFilter', kalmanFilter, ... 'age', 1, ... 'totalVisibleCount', 1, ... 'consecutiveInvisibleCount', 0); % add it to the array of tracks tracks(end + 1) = newTrack; % increment the next id nextId = nextId + 1; end end %% Display Tracking Results % The |displayTrackingResults| function draws a bounding box and label ID % for each track on the video frame and the foreground mask. It then % displays the frame and the mask in their respective video players. function displayTrackingResults() % convert the frame and the mask to uint8 RGB frame = im2uint8(frame); mask = uint8(repmat(mask, [1, 1, 3])) .* 255; minVisibleCount = 8; if ~isempty(tracks) % noisy detections tend to result in short-lived tracks % only display tracks that have been visible for more than % a minimum number of frames. reliableTrackInds = ... [tracks(:).totalVisibleCount] > minVisibleCount; reliableTracks = tracks(reliableTrackInds); % display the objects. If an object has not been detected % in this frame, display its predicted bounding box. if ~isempty(reliableTracks) % get bounding boxes bboxes = cat(1, reliableTracks.bbox); % get ids ids = int32([reliableTracks(:).id]); % create labels for objects indicating the ones for % which we display the predicted rather than the actual % location labels = cellstr(int2str(ids')); predictedTrackInds = ... [reliableTracks(:).consecutiveInvisibleCount] > 0; isPredicted = cell(size(labels)); isPredicted(predictedTrackInds) = {' predicted'}; labels = strcat(labels, isPredicted); % draw on the frame frame = insertObjectAnnotation(frame, 'rectangle', ... bboxes, labels); % draw on the mask mask = insertObjectAnnotation(mask, 'rectangle', ... bboxes, labels); end end % display the mask and the frame obj.maskPlayer.step(mask); obj.videoPlayer.step(frame); end %% Summary % This example created a motion-based system for detecting and % tracking multiple moving objects. Try using a different video to see if % you are able to detect and track objects. Try modifying the parameters % for the detection, assignment, and deletion steps. % % The tracking in this example was solely based on motion with the % assumption that all objects move in a straight line with constant speed. % When the motion of an object significantly deviates from this model, the % example may produce tracking errors. Notice the mistake in tracking the % person labeled #12, when he is occluded by the tree. % % The likelihood of tracking errors can be reduced by using a more complex % motion model, such as constant acceleration, or by using multiple Kalman % filters for every object. Also, you can incorporate other cues for % associating detections over time, such as size, shape, and color. displayEndOfDemoMessage(mfilename) end
dd

