1. petalinux 指令笔记
包含非国产zynq和国产zynq生成镜像流程
1.1 镜像文件构成方式
使用 u-boot 中的 mkimage 工具,可以将 zImage 制作为 uImage。uImage 是 u-boot 专用的镜像文件,它在 zImage 的前边加上一个 64 Byte 的“头”,描述了该内核的版本、加载位置、生成时间、大小等信息,除此以外和 zImage 没有区别
| image.ub文件 |
| 1.zImage, 内核镜像 |
| 2.rootfs, 根文件系统 |
| 3.system.dtb, 设备树 |
| BOOT.BIN |
| 1. zynq_fsbl.elf, fsbl镜像-上电启动的第一个程序,后面才启动uboot裸机程序 |
| 2. u-boot, 镜像 |
| 3. system.bit, PL端的 bit文件 |
1.2 常用命令
| petalinux-create --type project --template zynqMP --name zynqMP_nvme ## 在当前目录下生成 zynqMP_nvme 项目 |
| petalinux-config --get-hw-description [./] ## 包含 .hdf 或者是 .dsp的目录 |
| petalinux-config -c kernel ## 配置内核 |
| petalinux-config -c rootfs #配置文件系统 |
| petalinux-build ## 构建u-boot |
| # |
| # |
| petalinux-package --boot --fsbl --fpga --u-boot --force ##(SD卡启动) |
| petalinux-package --boot --fsbl --fpga --u-boot --kernel --force ##(FLASH启动) |
1.3 配置nvme
- 配置内核
| petalinux-config -c kernel |
| |
| Check: Bus options->PCI support should |
| Check: Bus options->PCI support->Message Signaled Interrupts (MSI and MSI-X) |
| Check: Bus options->PCI support->Enable PCI resource re-allocation detection |
| Check: Bus options->PCI support->PCI host controller drivers->Xilinx AXI PCIe host bridge support |
| Enable: Device Drivers->Block devices->NVM Express block device |
- 配置根文件系统
| petalinux-config -c rootfs |
| |
| Filesystem Packages->console/utils->pciutils->pciutils |
| Filesystem Packages->base->util-linux->util-linux |
| Packages->base->util-linux->util-linux-blkid |
| Packages->base->util-linux->util-linux-fdisk |
| Packages->base->util-linux->util-linux-mkfs |
| Packages->base->util-linux->util-linux-mount |
| Packages->base->e2fsprogs->e2fsprogs |
| Packages->base->e2fsprogs->e2fsprogs-mke2fs |
1.4 uboot下 启动image方式
uboot主要就是用来加载内核镜像等相关文件, 以下指令都在printenv 中可以查看到相关指令的使用方式
1.4.1 从flash中启动
flash 通过地址读取, 这个地址是提前写入的, 通过网络或者tf卡将镜像读取到内存,然后直接持久化到flash中,不过需要设置相关环境
| sf probe #初始化flash |
| sf read 0x1000000 0x02394a80 0x1600000 #从flash中读取指定长度的系统文件到内存0x1000000中,这里读取的是 image.ub |
| bootm 0x1000000 # 从指定内存中启动程序 |
1.4.2 从tf卡的FAT32分区启动
| mmc list #查看mmc设备(会显示当前tf卡的分区) |
| mmc dev [mmc序号] [分区] #mmc序号可以通过 mmc list 查看 |
| mmcinfo #查看当前mmc设备详细信息 |
| fatload mmc 0 0x1000000 image.ub #将某个文件从mmc设备中读取到内存 0x1000000 |
| md 0x1000000 [长度] #查看内存值是否读取正确 |
| bootm 0x1000000 #然后通过 bootm从内核加载内核 |
1.5 tftp 启动
| setenv serverip 192.168.1.15 ##设置ftfp服务器的地址 |
| md 0x1000000 # 查看内存地址 0x1000000 是否有数据,如果有可以换个地址 |
| tftpboot 0x1000000 image.ub # 将image.ub 从服务器加载到地址为0x1000000的内存中 |
| bootm 0x1000000 # 启动镜像 |
1.6 将程序固化到flash中
| //将内存地址mem_addr开始起后面 data_len 的数据长度, 写入flash偏移 flash_offset, flash_offset也可以理解flash的地址 |
| sf write [mem_addr] [flash_offset] [data_len] |
1.7 petalinux 免登录
| petalinux-config --get-hw-description [./] |
| Yocto Settings->Enable Debug Tweaks # 选中该选项 |
1.8 jtag和串口冲突,导致串口使用不了
| petalinux-config -c kernel |
| CPU Power Management->CPU Idle->CPU idle PM support ##取消该选项 |
1.9 进口zynq, ARM linux 驱动开发,对设备树和kernel,rootfs的生成笔记
| # 1.使用petalinux 创建工程并编译配置文件生成BOOT.BIN |
| petalinux-create -t project --template zynq -n ALIENTEK-ZYNQ |
| cd ALIENTEK-ZYNQ |
| petalinux-config --get-hw-description ../hdf/ #选择以下配置选择存放 .hdf 的存放目录 |
| > 1. image storage media(选择tf) # 配置设备树从image.ub独立开来, 从tf卡中启动 |
| > 2. Root filesystem type (选择tf) # 配置根文件系统放到tf卡的EXT4分区中 |
| petalinux-build -c u-boot #会重新生成设备树, 如果生成不了,可以直接用 petalinux-build 全部编译,在image/linux *.dtsi和*.dts |
| petalinux-package --boot --fsbl --u-boot --force #生成BOOT.BIN,只包含zynq_fsbl.elf 和 u-boot.elf(平常还会包含system.bit) |
| |
| # 2. 根据device-tree仓库生成设备树文件(和petalinux-build -c uboot相比, 该方法速度快,不需要重新编译BOOT.BIN) |
| 2.1 下载设备树仓库: https: |
| 2.2 解压到 /home/hgx/tools/liunx_project/tools/device-tree |
| 2.3 输入指令 hsi,进入 hsi指令行,并输入以下指令 |
| open_hw_design /home/hgx/tools/liunx_project/hdf_dir/navigator_7010_wrapper.hdf |
| set_repo_path /home/hgx/tools/liunx_project/tools/linux-2018.3/linux-xlnx-xilinx-v2018.3 |
| create_sw_design device-tree -os device_tree -proc ps7_cortexa9_0 |
| generate_target -dir /home/hgx/tools/liunx_project/tools/dts #最后生成的设备树相关文件都在该目录下,可以自己指定 |
| exit #退出 |
| |
| # 3. 使用官方2018.3版本的linux编译kernel |
| 3.1 下载源码: https: |
| 3.2 将前面用设备树仓库生成的设备树: /home/hgx/tools/liunx_project/tools/dts,目录下的 pcw.dtsi, pl.dtsi, system-top.dts,zynq-7000.dtsi 直接拷贝到 arch/arm/boot/dts下 |
| 3.3 对 system-top.dts 修改,修改内容如下有介绍 |
| 3.4 在 arch/arm/boot/dts 目录下的 Makefile, 中修改如下 |
| zynq-zybo.dtb \ |
| system-top.dtb #(新添加的) |
| 3.5 make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- xilinx_zynq_defconfig #根据defconfig配置.config,"./arch/arm64/configs/defconfig->./.config" |
| 3.6 make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- zImage -j8 #编译内核zImage,在目录arch/arm/boot/下 |
| 3.7 make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- system-top.dtb -j8 #编译设备树 |
| |
| # 4.编译 rootfs |
| 4.1 在1中生成的petalinux 项目中,使用指令 petalinux -c rootfs |
| >在debug-tweaks 选择账号登录 |
| 4.2 petalinux-build -c rootfs |
| |
| # 5.拷贝SD卡,并启动 |
| 5.1 将SD卡分区,如下,使用指令 sudo fdisk /dev/tfb 制作分区,并将两个分区挂载 |
| Disk /dev/tfb: 29.1 GiB, 31293702144 bytes, 61120512 sectors |
| Device Boot Start End Sectors Size Id Type |
| /dev/tfb1 * 2048 206847 204800 100M c W95 FAT32 (LBA) |
| /dev/tfb2 206848 61120511 60913664 29G 83 Linux |
| 5.2 将如下文件拷贝到tf卡的FAT分区 |
| arch/arm/boot/zImage |
| arch/arm/boot/dts/system-top.dtb |
| images/linux/system.bit |
| images/linux/BOOT.BIN |
| 5.3 然后将根文件系统解压到tf卡的 EXT4分区 |
| sudo tar -xvf images/linux/rootfs.tar.gz -C ${挂载的EXT4盘目录} |
| 5.4 将卡查到开发板上 |
| |
| # 6. 修改 env环境,设置自动启动 |
| env default -a |
| setenv bitstream_load_address 0x100000 |
| setenv bitstream_image system.bit |
| setenv bitstream_size 0x300000 |
| setenv kernel_img zImage |
| setenv dtbnetstart 0x2000000 |
| setenv netstart 0x2080000 |
| setenv cp_dtb2ram 'mmcinfo && fatload mmc 0:1 ${dtbnetstart} ${dtb_img}' |
| setenv default_bootcmd 'if mmcinfo; then run uenvboot; echo Copying Linux from SD to RAM... && load mmc 0 ${bitstream_load_address} ${bitstream_image} && fpga loadb 0 ${bitstream_load_address} ${bitstream_size} && run cp_kernel2ram && run cp_dtb2ram && bootz ${netstart} - ${dtbnetstart}; fi' |
| |
| saveenv #将环境变量保存 |
| boot/reset #启动开发板,然后会自动进入系统 |
最后修改的 system-top.dts
| |
| |
| |
| |
| |
| |
| |
| /dts-v1/; |
| #include "zynq-7000.dtsi" |
| #include "pl.dtsi" |
| #include "pcw.dtsi" |
| / { |
| model = "Alientek ZYNQ Development Board"; |
| chosen { |
| bootargs = "console=ttyPS0,115200 earlyprintk root=/dev/mmcblk0p2 rw rootwait"; |
| stdout-path = "serial0:115200n8"; |
| }; |
| aliases { |
| ethernet0 = &gem0; |
| i2c0 = &i2c2; |
| i2c1 = &i2c0; |
| i2c2 = &i2c1; |
| serial0 = &uart0; |
| serial1 = &uart1; |
| spi0 = &qspi; |
| }; |
| memory { |
| device_type = "memory"; |
| reg = <0x0 0x20000000>; |
| }; |
| }; |
| |
| &gem0 { |
| local-mac-address = [00 0a 35 00 1e 53]; |
| }; |
| |
| &qspi { |
| #address-cells = <1>; |
| #size-cells = <0>; |
| flash0: flash@0 { |
| compatible = "n25q512a","micron,m25p80"; |
| reg = <0x0>; |
| #address-cells = <1>; |
| #size-cells = <1>; |
| spi-max-frequency = <50000000>; |
| partition@0x00000000 { |
| label = "boot"; |
| reg = <0x00000000 0x00500000>; |
| }; |
| partition@0x00500000 { |
| label = "bootenv"; |
| reg = <0x00500000 0x00020000>; |
| }; |
| partition@0x00520000 { |
| label = "kernel"; |
| reg = <0x00520000 0x00a80000>; |
| }; |
| partition@0x00fa0000 { |
| label = "spare"; |
| reg = <0x00fa0000 0x00000000>; |
| }; |
| }; |
| }; |
2 国产zynq 对 FSBL、设备树、uboot、系统镜像生成流程
2.1 设备树 和 FSBL的生成
| 1.新建 procise 工程 |
| 2.点击 "Create Block Design" -> 输入新创建名 "system" -> 回车 |
| 3.在 tab页面"system.bd" 处右击 "Add IP" -> 选中 "processing_system7:1.0" -> 回车添加即可 |
| 4.双击"IP核"设置对应的外设管脚, 一般有 "flash", "以太网", "uart"等。 |
| 5.在 source 标签栏下右击 "system_i" -> 选择 "Generate Output Products" -> 双击即可 |
| 6.在工具栏中点击 "PSOC" -> 选中 "Repositories" -> 其中 "Local Repositorie" 中只能有一个仓库 -> 点击退出 |
| 7.在 source 标签栏下右击 "system_i" -> 选择 "Export Hardware ..." -> 选择 "FSBL" 和 "DeviceTree" |
| 8.然后打开项目的位置, 打开"../SDK/system_platform" |
| 9.然后双击 "system_platform.eww", 然后, 用IAR 编译"Make", 生成 "FSBL.out" 即可生成 FSBL程序 |
| 10.其中DeviceTree就是生成的设备树, 直接拷贝到linux环境下用于编译 uboot |
| 补充: |
| 11.如果JTAG的线是在PL连的话, 第一次烧写使用IAR需要线烧写bit |
| 12.在步骤3中, 如果是从 vivadio 导入的文件 "system.bd" 和 "system_processing_system7_0_0.xci", 就可以不用去自己设置IP核 |
2.2 设备树的编译 和 uboot 生成
| 1.将文件 "FMQL-Linux-SDK_20201022.tar.bz2" 拷贝到 具有"petalinux" 环境的linux系统, 然后解压 |
| 2.将生成设备树的步骤"10"中,将生成的设备树拷贝到linux中 |
| 3.然后 进入"FMQL-Linux-SDK_20201022",输入"source env.sh" |
| 4.编辑 "SDK_20201022/device-tree/xlnx-dts/openhdf.sh" 文件第"8"行, 添加"petalinux"安装目录 |
| 5.输出指令 "./build.sh --hw /home/{user_name}/Downloads/DeviceTree/ --nofpga dtb", 其中 "--nofpga" 是忽略"PL"部分, 如果包含fpga部分,则需要输入 "./build.sh --hw /home/{user_name}/Downloads/DeviceTree/ --hdf xxx/xxx.hdf dtb" |
| 6.就会生成在"FMQL-Linux-SDK_20201022/images"目录下生成 "system-top.dtb" |
| 7.然后进入"FMQL-Linux-SDK_20201022/u-boot-2018.07-fmsh"目录下 |
| 8.输入指令 "make fmql_common_defconfig" 生成 ".config" 配置文件 |
| 9.输入指令 "make EXT_DTB=../images/system-top.dtb -j4" 编译 "uboot" |
| 10.在 "FMQL-Linux-SDK_20201022/u-boot-2018.07-fmsh"目录中会出现 "u-boot.bin" 和 "u-boot.elf" 文件, "u-boot.bin" 用于制作 "BOOT.bin" |
2.3 根文件系统的生成
| 1.进入"FMQL-Linux-SDK_20201022/buildroot-2018.02.3" 目录下 |
| 2.输入"make fmsh_tiny_defconfig" 生成 ".config"文件 |
| 3.输入"make busybox-dirclean" 和 "make initscripts-dirclean" 清除之前编译的 |
| 4.然后输入 "make" 进行编译 |
| 5.编译完成后 "FMQL-Linux-SDK/buildroot-2018.02.3/output/images"目录下将生成多种格式的 "rootfs" 文件 |
| 6. 进入目录 output/images |
| mkdir rootfs && cd rootfs |
| sudo cpio -i < ../rootfs.cpio #使用root解压 rootfs.cpio |
| sudo find . | sudo cpio -H newc -o| gzip -9 > ../rootfs.cpio.gz #使用root权限打包 |
| cd ../ && sudo cp roofs.cpio.gz ../../../images |
| 7. "rootfs.cpio.gz" 将用于制作 "image.ub" |
2.4 uImage 系统镜像生成
1)Image 内核镜像文件
2)zImage 压缩的内核镜像文件
3)uImage 是 u-boot 专用镜像, 相比 zImage 多了 64Byte 的头,用来描述内核版本,加载位置, 生成时间,大小位置等信息
| 1.进入 "FMQL-Linux-SDK_20201022/ linux-4.14.55-fmsh" 目录中 |
| 2.输入 "make fmsh_fmql_defconfig" 生成 ".config" 配置文件, 然后输入 "make -j4" 开始执行编译 |
| 3.生成的镜像位于 "arch/arm/boot" 目录下, "ZImage" 格式的镜像用于制作 "image.ub" |
2.5 image.ub 镜像的生成
| 1.选择制作的类型, 编辑"FMQL-Linux-SDK_20201022/env.sh" 中的 "IMAGE_TYPE"为 "ramdisk" |
| 2.需要上述生成的文件"system-top.dtb","zImage","rootfs.cpio.gz","Image" 拷贝到目录"FMQL-Linux-SDK_20201022/images" 下 |
| 3."FMQL-Linux-SDK_20201022" 目录下, 输入 "./build.sh image", 开始制作 "image.ub" 镜像 |
| 4."FMQL-Linux-SDK_20201022/image" 目录下会生成 "image.ub"文件 |
2.6 BOOT.bin 生成
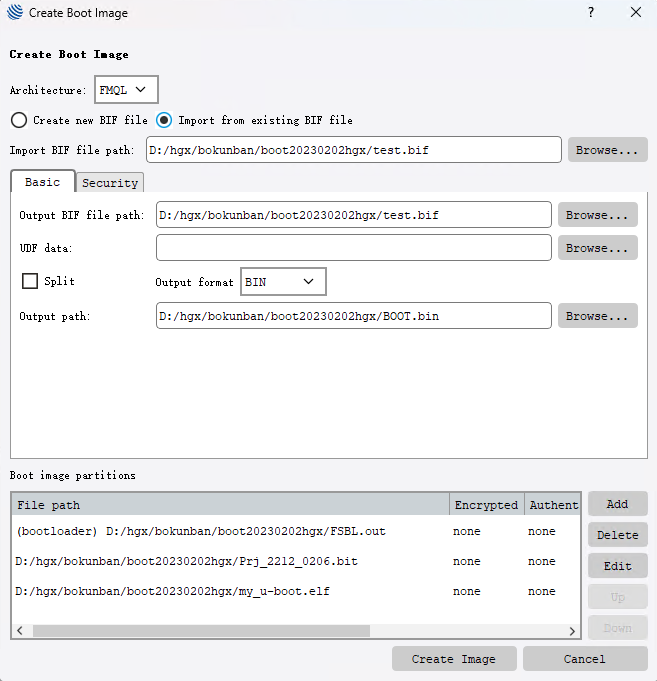
BOOT.bin 是 FSBL.out, system.bit, u-boot/u-boot.elf 合并而成, 烧进去之后, 直接烧镜像 "image.ub" 即可
| 1.打开 "Star Procise", 点击 工具栏中的 "PSOC" -> "Create Boot Image" |
| 2.点击add, 添加"FSBL.out", "system.bit"(如果有PL需要加), "u-boot"/"u-boot.elf", 然后点击 "Create Image" 即可生成 |
碰见的问题
1. uboot下和liunx环境下, flash 识别不到和分区创建
通过电路图可知, "flash" 存储器型号为 XM25QH256CXIQT08S, 大小为 250Mb(32MB),
通过设备树修改, 将flash 最后的4MB大小创建分区, 用于系统挂载,存放文件
在 "uboot" 源码下 u-boot-2018.07-fmsh/drivers/mtd/spi/spi_flash_ids.c 中 spi_flash_ids[]数组中添加对应flash型号
在linux-4.14.55-fmsh/drivers/mtd/spi-nor/spi-nor.c 中spi_nor_ids[]数组中添加对应flash id
eg: { "n25q256abcd", INFO(0x204019, 0, 64*1024, 512, SECT_4K) },, 其中 0x204019 需要在手册中查看
2. 自启动脚本设置
在 buildroot-2018.02.3/package/initscripts/init.d 目录下创建脚本
| #!/usr/bin/env sh |
| echo -e "---------------------------\n" |
| # 挂载盘 |
| # 执行挂载盘中的脚本或者程序 |
然后在 重新走下 2.3 步骤,生成跟文件系统
petalinux 驱动开发笔记
设备号
- 设备号的类型为 unsigned int, 其中高12bit为主设备号(0~4095), 低20位为 次设备号
| #define MINORBITS 20 |
| #define MINORMASK ((1U << MINORBITS) - 1) |
| |
| #define MAJOR(dev) ((unsigned int) ((dev) >> MINORBITS)) |
| #define MINOR(dev) ((unsigned int) ((dev) & MINORMASK)) |
| #define MKDEV(ma,mi) (((ma) << MINORBITS) | (mi)) |
宏 MINORBITS 表示次设备号位数,一共是 20 位。
宏 MINORMASK 表示次设备号掩码。
宏 MAJOR 用于从 dev_t 中获取主设备号,将 dev_t 右移 20 位即可。
宏 MINOR 用于从 dev_t 中获取次设备号,取 dev_t 的低 20 位的值即可。
宏 MKDEV 用于将给定的主设备号和次设备号的值组合成 dev_t 类型的设备号。
2. 设备号分配, 静态分配和动态分配
静态设备容易起冲突, 在注册前可以动态申请设备号
| int alloc_chrdev_region(dev_t *dev, unsigned baseminor, unsigned count, const char *name); |
| void unregister_chrdev_region(dev_t from, unsigned count); |
LICENSE 和作者信息
LICENSE 是必须添加的
| MODULE_LICENSE("GPL"); |
| MODULE_AUTHOR("alientek"); |
printk输出级别
include/linux/kern_levels.h 中包含了 prink输出的级别
include/linux/printk.h CONSOLE_LOGLEVEL_DEFAULT 默认输出级别
编译驱动并加载
1. 设置 Makefile
| KERN_DIR:=/home/hgx/tools/liunx_project/tools/linux-2018.3/linux-xlnx-xilinx-v2018.3 |
| obj-m := driver_char.o |
| |
| all: |
| make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- -C $(KERN_DIR) M=`pwd` modules |
| |
| clean: |
| make -C $(KERN_DIR)=`pwd` clean |
2. 加载 驱动
- 将 xx.ko 直接拷贝到开发板中的linux中
- 然后使用
insmod/modprobe xxx.ko 加载驱动
cat /proc/devices 查看设备号`mknod /dev/chrdevbase c 200 0 根据设备号创建节点文件- 在ubuntu中编写用户态代码对
/dev/chrdevbase文件进行读写测试, 并使用 arm-linux-gnueabihf-gcc xxx.c -o xxx
- 然后将编译完的文件直接拷贝到开发板上直接 运行即可



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· Manus的开源复刻OpenManus初探
· AI 智能体引爆开源社区「GitHub 热点速览」
· C#/.NET/.NET Core技术前沿周刊 | 第 29 期(2025年3.1-3.9)
· 从HTTP原因短语缺失研究HTTP/2和HTTP/3的设计差异
2021-04-08 iperf3 测试宽带, 设置tcp和udp包大小
2021-04-08 jdk下载登录账号