Ubuntu利用ROS搭建手机移动网络摄像头(Android)
| PC -> Ubuntu 16.04 - > ROS Kinetic |
| Android系统手机 |
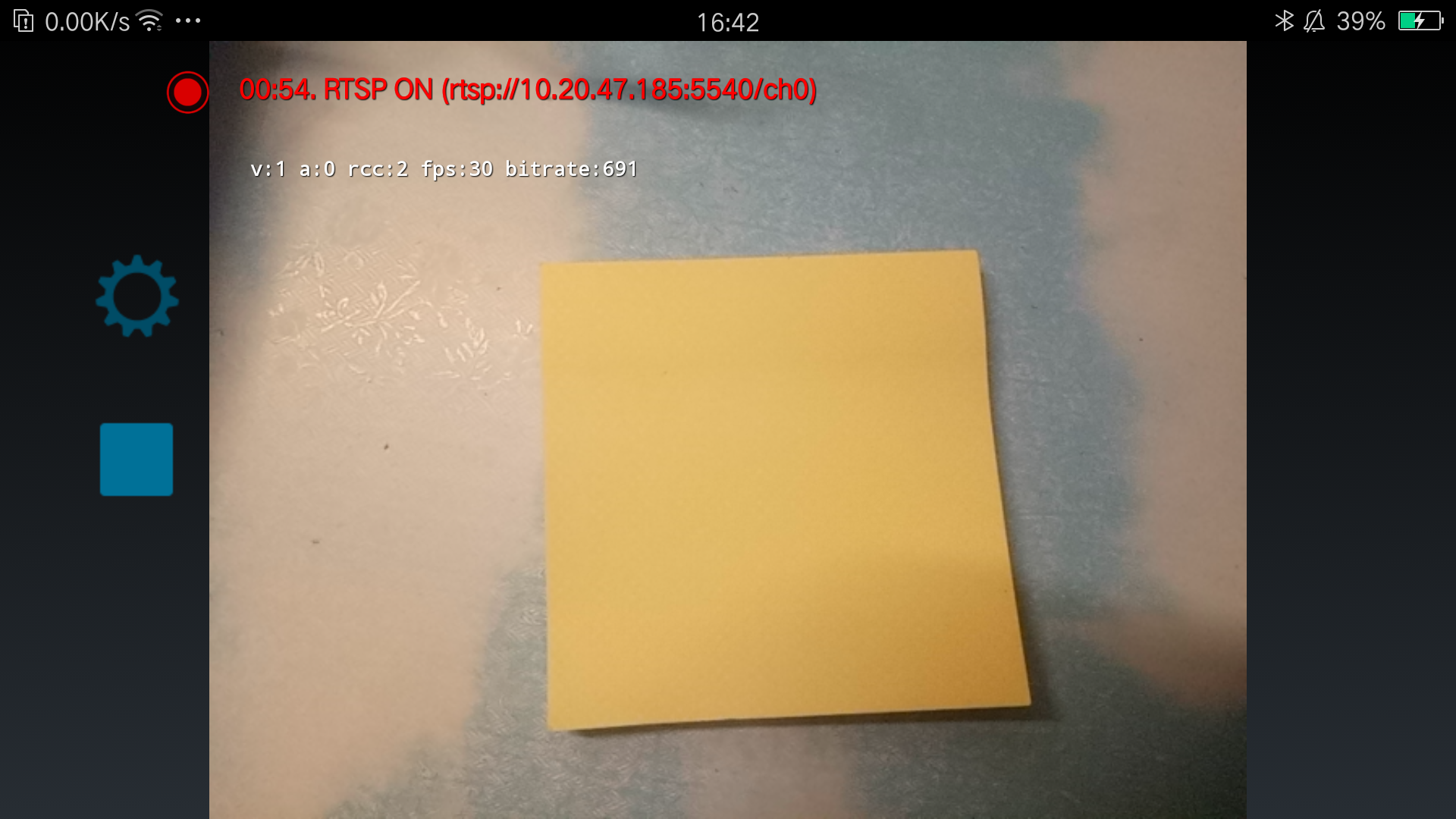
1、Android移动端APP下载安装
配置手机端:(一般默认即可RTSP)
2、源码下载(rocon_devices_kinetic)
将文件解压在catkin_ws/src文件夹;
3、编译
1 | catkin_make |
4、配置
1 | source xxx/devel/setup.bash (×××是路径) |
5、查看手机端接口,并配置
1 | export ROCON_RTSP_CAMERA_RELAY_URL=rtsp://×××:5540/ch0 (×××是IP) |
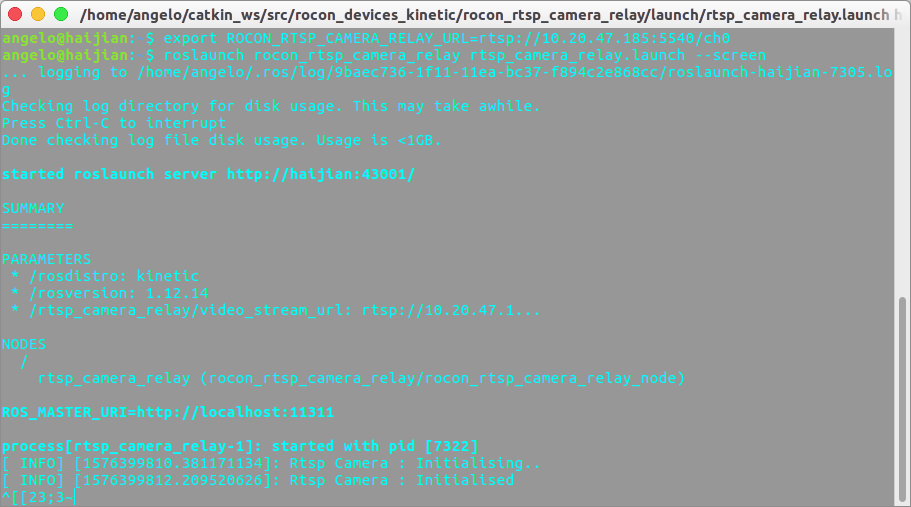
6、运行驱动
1 | roslaunch rocon_rtsp_camera_relay rtsp_camera_relay.launch --screen |
7、查看ros接口
1 | rostopic list |
1 2 3 4 5 6 7 8 9 10 11 12 13 14 | /rosout/rosout_agg/rtsp_camera_relay/camera_info/rtsp_camera_relay/image/rtsp_camera_relay/image/compressed/rtsp_camera_relay/image/compressed/parameter_descriptions/rtsp_camera_relay/image/compressed/parameter_updates/rtsp_camera_relay/image/compressedDepth/rtsp_camera_relay/image/compressedDepth/parameter_descriptions/rtsp_camera_relay/image/compressedDepth/parameter_updates/rtsp_camera_relay/image/theora/rtsp_camera_relay/image/theora/parameter_descriptions/rtsp_camera_relay/image/theora/parameter_updates/rtsp_camera_relay/status |
8、数据可视化
1 | rosrun image_view image_view image:=/rtsp_camera_relay/image |

过程可能遇到错误:
error while loading shared libraries: libopencv_core3.so.3.3: cannot open shared object file: No such file or directory
解决方法:
①打开路径/etc/ld.so.conf.d
②创建文件OpenCV.conf
③在OpenCV.conf中写入:opencv文件夹lib的路径
④在终端执行命令:
1 | sudo ldconfig |
作者:HaijianYang
欢迎任何形式的转载,但请务必注明出处。
限于本人水平,如果文章和代码有表述不当之处,还请不吝赐教。
分类:
ubuntu


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· winform 绘制太阳,地球,月球 运作规律
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· AI与.NET技术实操系列(五):向量存储与相似性搜索在 .NET 中的实现
· 超详细:普通电脑也行Windows部署deepseek R1训练数据并当服务器共享给他人
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理