


西门子PLC1200内使用SCL实现简化版PID算法
西门子自带的PID效果很好,但是会比较吃性能,使用次数有限,很多地方需要PID但不需要这么精准的PID,所以网上找个简单的算法自己调用。
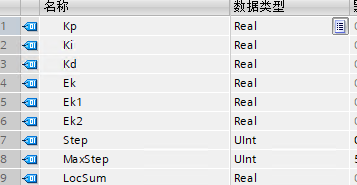
新建数据类型
前三个就是PID三个参数
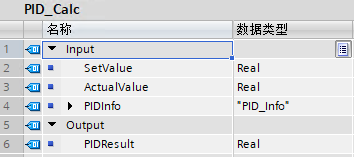
新建FC块:
#PIDInfo.Step += 1; IF #PIDInfo.Step >= #PIDInfo.MaxStep-1 THEN #PIDInfo.Step := 0; #PIDInfo.Ek := #SetValue - #ActualValue; #PIDInfo.LocSum += #PIDInfo.Ek; //累计误差 #PIDResult := #PIDInfo.Kp * #PIDInfo.Ek + (#PIDInfo.Ki * #PIDInfo.LocSum) + #PIDInfo.Kd * (#PIDInfo.Ek1 - #PIDInfo.Ek); #PIDInfo.Ek1 := #PIDInfo.Ek; END_IF;
调用:
DB块内增加变量

Step和MaxStep用于控制扫描多少次调用一次,以及可以错开调用

左边填入设置值,实际值,和刚才添加的变量,右边输出PID,PID输出值没有明确的范围,自己用Limite限制范围,调整P值让输出值在范围内浮动
附C#实现
class PID_Info { float Kp = 1; //比例系数Proportional float Ki = 0.2f; //积分系数Integral float Kd = 0.1f; //微分系数Derivative float Ek; //当前误差 float Ek1; //前一次误差 e(k-1) float Ek2; //再前一次误差 e(k-2) float LocSum; //累计积分位置 public static float PID_Calc1(float SetValue, float ActualValue, PID_Info PID) { float PIDLoc; //位置 PID.Ek = SetValue - ActualValue; PID.LocSum += PID.Ek; //累计误差 PIDLoc = PID.Kp * PID.Ek + (PID.Ki * PID.LocSum) + PID.Kd * (PID.Ek1 - PID.Ek); PID.Ek1 = PID.Ek; return PIDLoc; } public float Calc1(float SetValue, float ActualValue) { return PID_Calc1(SetValue, ActualValue, this); } public static float PID_Inc(float SetValue, float ActualValue, PID_Info PID) { float PIDInc; //增量 PID.Ek = SetValue - ActualValue; PIDInc = (PID.Kp * PID.Ek) - (PID.Ki * PID.Ek1) + (PID.Kd * PID.Ek2); PID.Ek2 = PID.Ek1; PID.Ek1 = PID.Ek; return PIDInc; } public float Inc(float SetValue, float ActualValue) { return PID_Inc(SetValue, ActualValue, this); } }
算法来自
blog。csdn。net/weibo1230123/article/details/80812211

