控制系统中的增益与控制极限环的关系
代码:


s=tf('s'); K=[2 4 6 8 10 12]; sysK=K(1); sysG=(s+1)^2/s^3; %sysZ=feedback(series(sysKxxl,sysGsc),1); subplot(231) rlocus(feedback(series(K(1),sysG),1)) grid on legend subplot(233) rlocus(feedback(series(K(2),sysG),1)) grid on legend subplot(232) rlocus(feedback(series(K(3),sysG),1)) grid on legend subplot(234) rlocus(feedback(series(K(4),sysG),1)) grid on legend subplot(236) rlocus(feedback(series(K(5),sysG),1)) grid on legend subplot(235) rlocus(feedback(series(K(6),sysG),1)) grid on legend
图像如下:
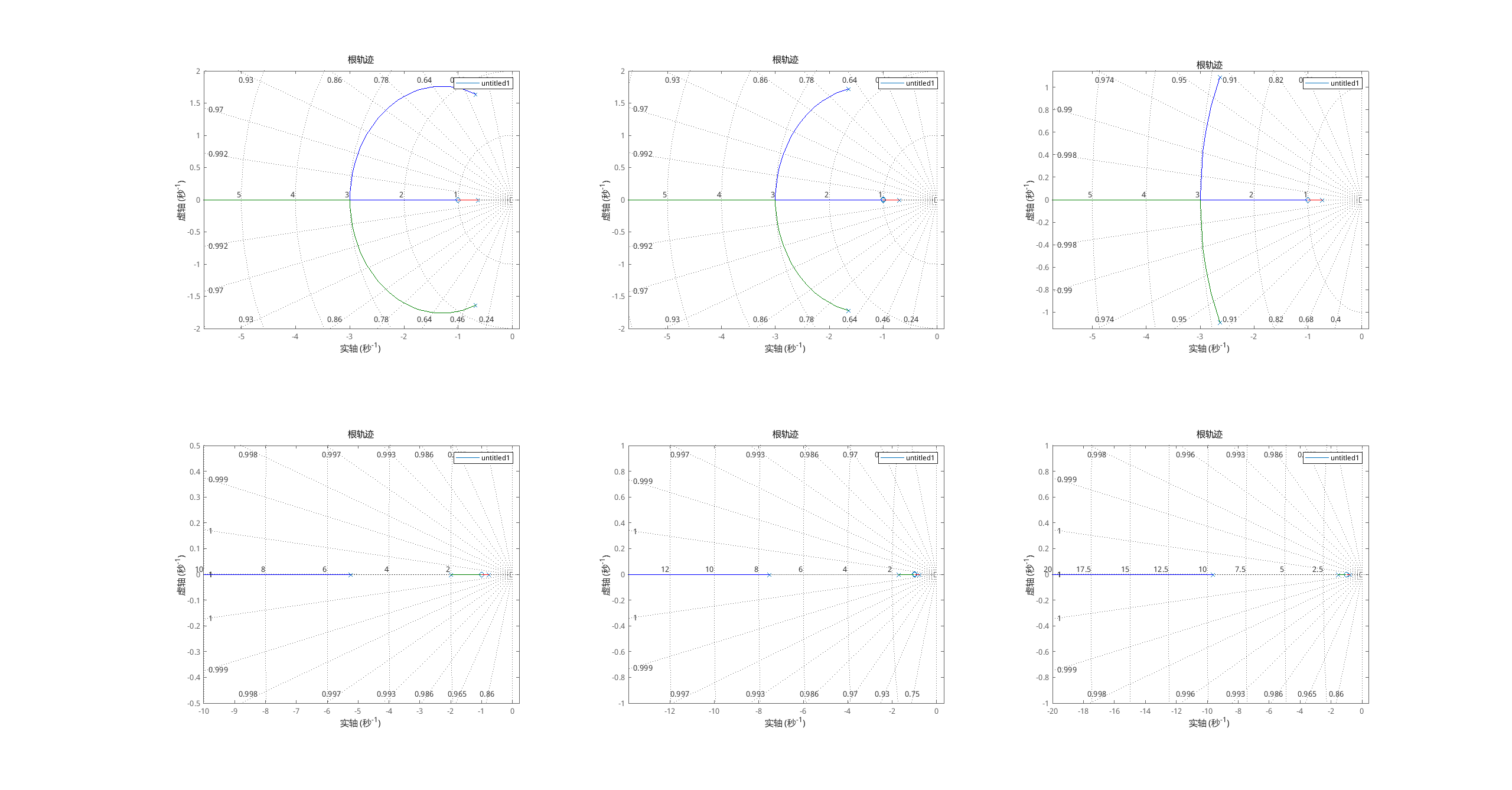
根轨迹这么分析就有点意思了,阻尼比和增益都会影响到根轨迹。
人就像是被蒙着眼推磨的驴子,生活就像一条鞭子;当鞭子抽到你背上时,你就只能一直往前走,虽然连你也不知道要走到什么时候为止,便一直这么坚持着。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· AI技术革命,工作效率10个最佳AI工具
2023-06-23 修复受损的grub启动
2023-06-23 mandriva grub
2017-06-23 霸道的代码,不能加注释