直观弄懂什么是PID
https://baijiahao.baidu.com/s?id=1672873422210608802&wfr=spider&for=pc
1、基本概念
虽然老套,但是必须要知道一些基本概念,否则无法下一步:P是比例调节,I是积分调节,D是微分调节

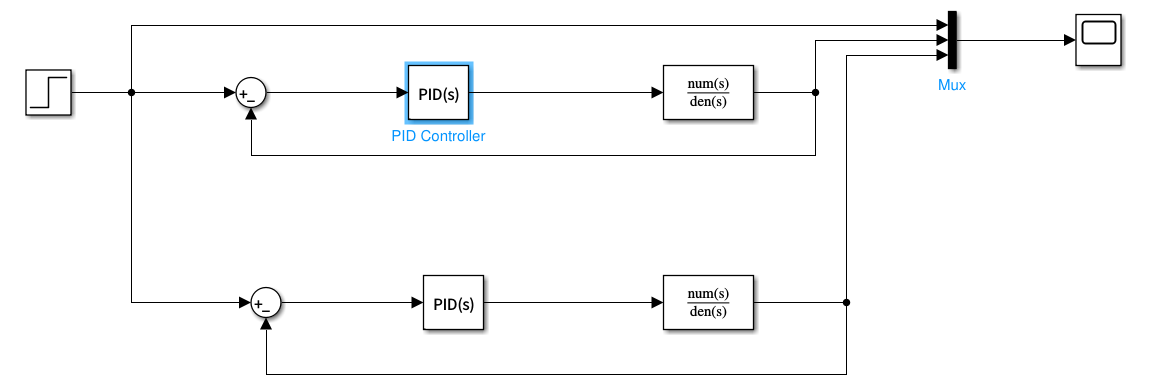
2、各个环节
P作为比例环节,作用就是一旦产生偏差,需要瞬间对偏差作出反应,使控制量朝着偏差减小的方向变化,控制作用的强弱完全取决于比例系数,系数越大,控制作用也越强。
例如:将咖啡机作为一个系统,其中的加热装置需要用PID控制,强调下,PID控制中的三个参数一旦设置成功后就是个常量,不再发生变化的。加入一开始水温是25度,设定的温度是60度,此时的温度偏差就是35度,因此,比例系数的作用就是P*温度差值,此时就是35P,经过一个周期后,假如温度升高到29度,此时温度偏差就是31度,此时加热装置的火力就是31P,再经过一个周期,假如水温到了36度,此时温度偏差就是24度,加热装置的火力就是24P,就这样经过多个周期后,水温逐渐接近设定的温度60度,加热装置的火力也在逐渐减小。由此可见,P的数值越大,火力就越大,控制作用就越强,反之就越弱。
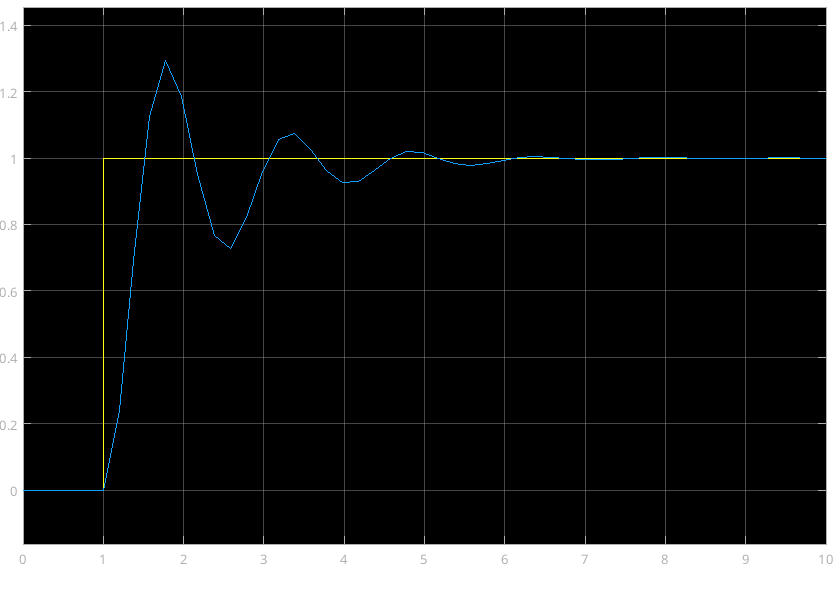
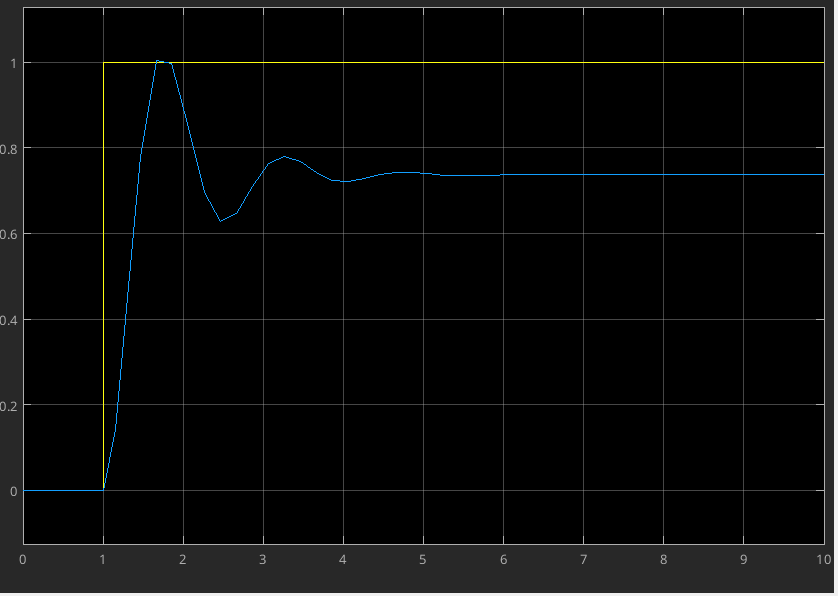
对比实验:P=1;I=0;D=0;
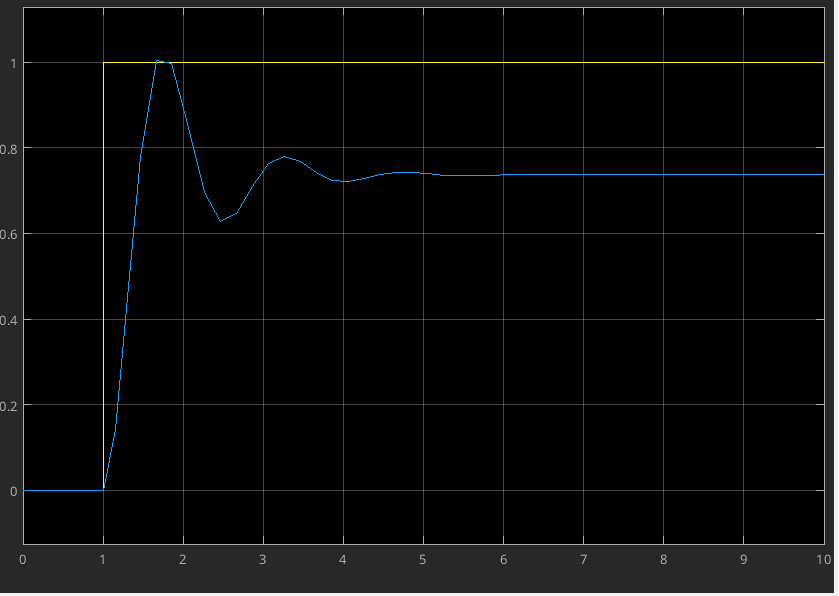
vs P=2;I=0;D=0;
通过对比图,蓝色是P=1,红色是P=2,随着比例系数从1增加到2,PID的调节能力明显增强,更快达到设定的温度,但是超调量增大。但是静态误差降低了。
I积分环节是为了解决静差,深入理解以下静差。接着咖啡机加热,只要有了温度的偏差就会使系统开启加热的系统加热,若没有温度偏差呢,自然就不会加热了。但是,考虑一下特殊情况,若外界稳定比较低,当水温是50度时,加热的火力是10P,那么正好在水温上升的过程中,水的散热导致降温的效果也是10P;此时,加热的速度与散热的速度相等,温度的偏差不变,单纯的依靠比例控制很明显是无法是水温达到60度的,温度偏差不变,加热火力就不变,散热效率也固定,就这样成了死循环了。这就是说误差的值被确定下来了,就构成了静差。也就是说,当系统处于一个稳定状态的时候,实际的温度和目标的温度之间存在一个稳定的差值,这就是静态误差。积分环节将温度的偏差累加后作用到加热设备上。可以想到的是,此时的比例环节虽然是没有办法变化了,但是温度偏差的存在,积分环节的加入,还是会让温度继续升高,积分环节导致升温,升温过大了,比例环节有无能为例了。并且积分环节的加入,增加了相应的时间。
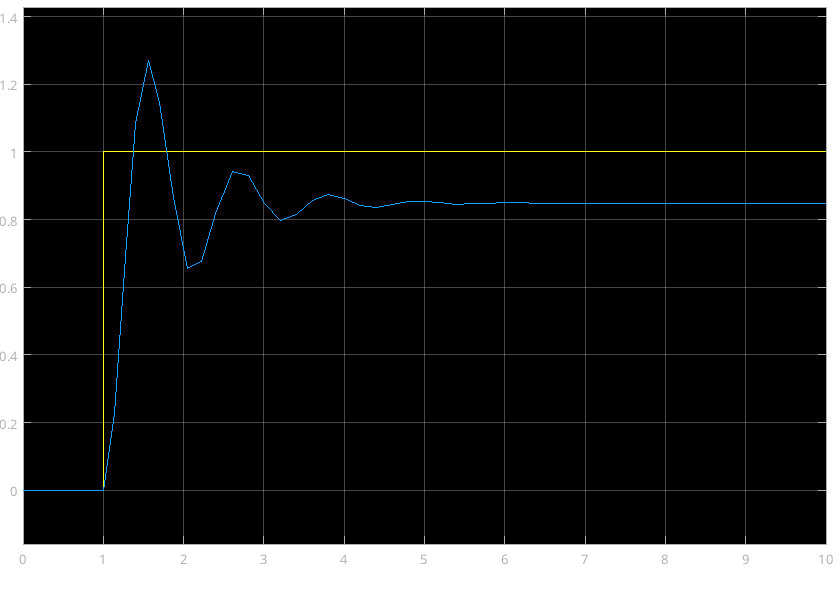
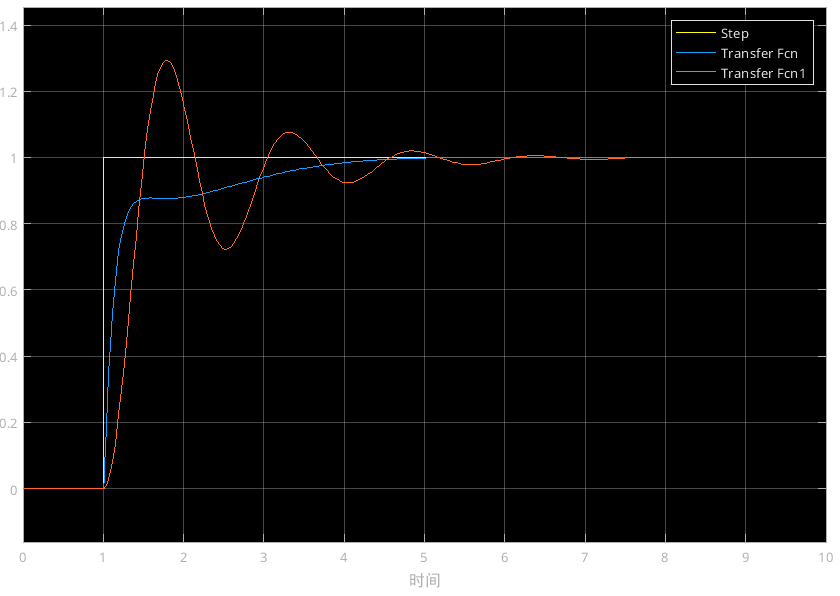
对比实验:P=1;I=1;D=0;
vs P=1;I=0;D=0;
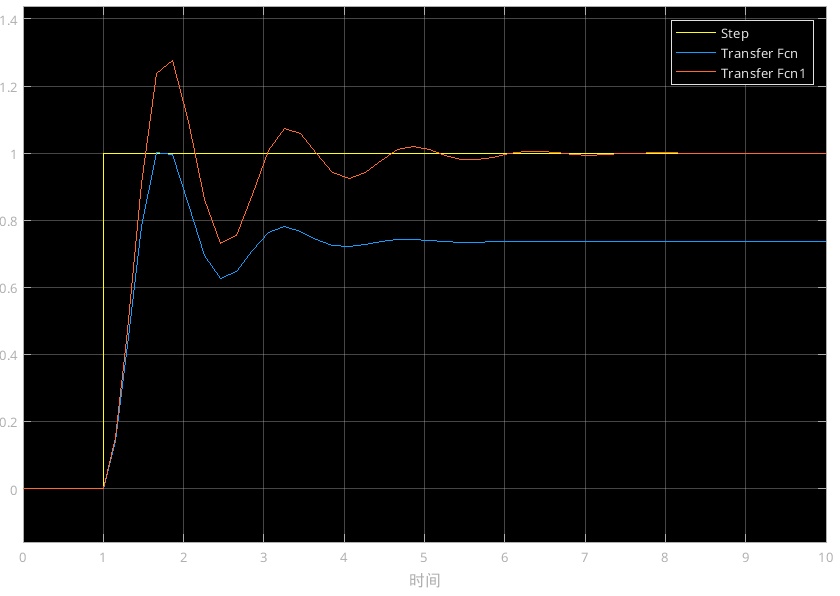
通过对比图,P=1时,蓝色是I=0,红色是I=1,此时比例系数都为1,随着积分系数从0增加到1,PID的比例调节部分几乎是一样,达到设定的温度的时刻差距不大,但是达到稳定条件后,随着积分系数的增大,振荡次数明显增大,增加了响应的时长,积分环节使得响应时长增大,但是最终静态误差几乎被剔除了。
D微分环节为了探测温度的变化趋势的大小与方向,进而对下一步的变化趋势进行处理。
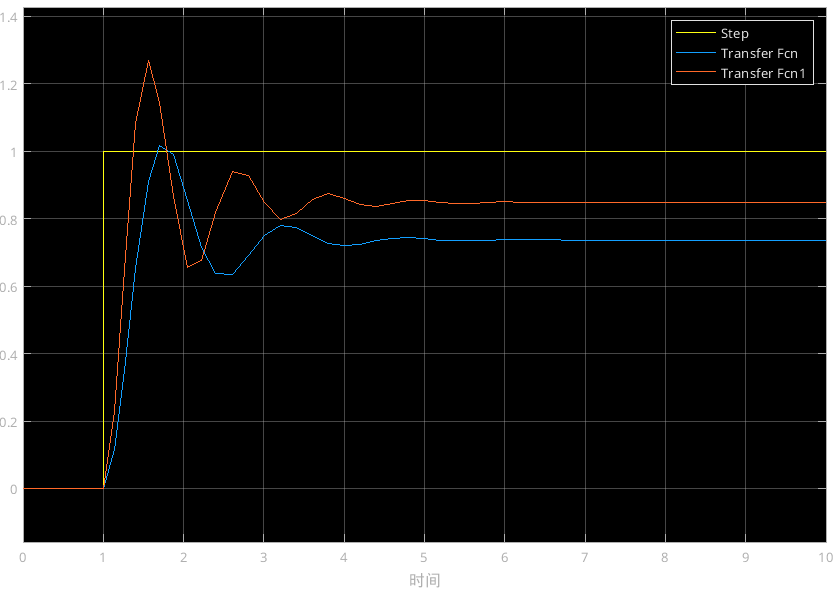
对比实验:P=1;I=1;D=0.5;
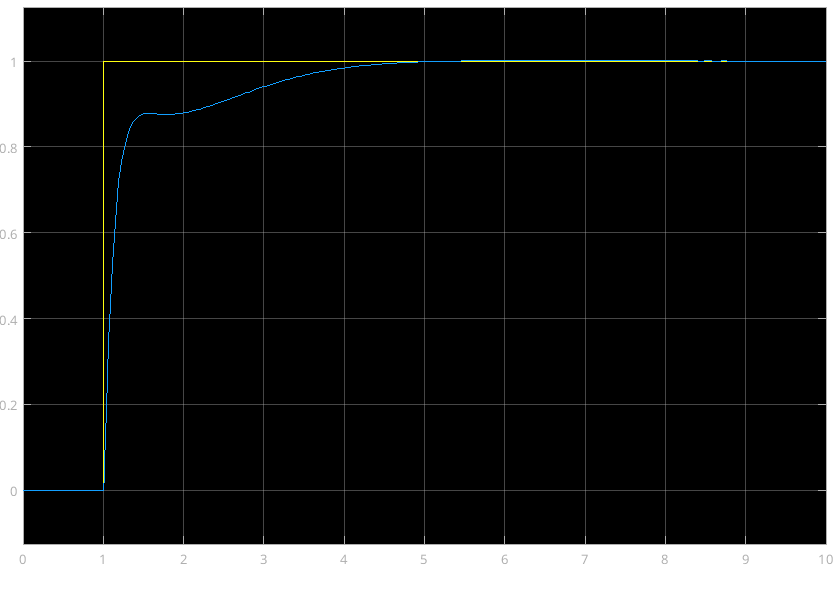
vs P=1;I=1;D=0;
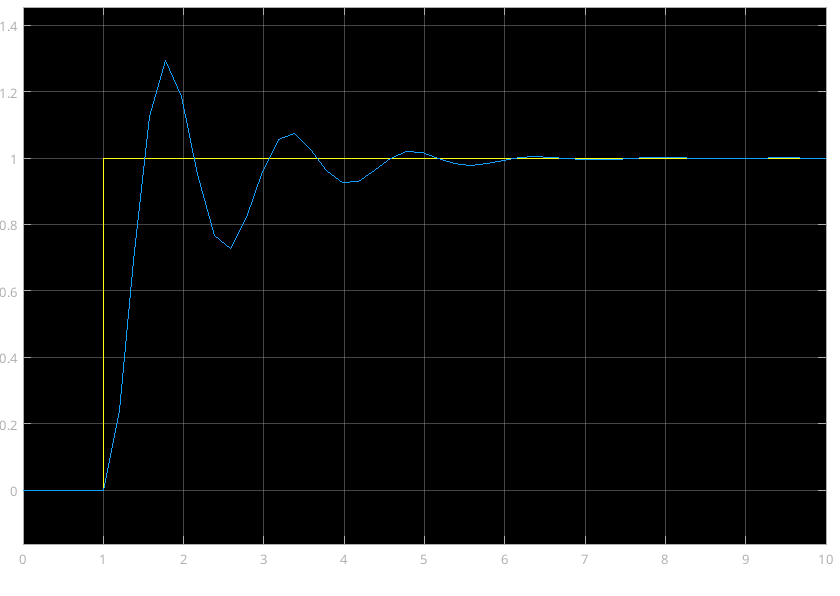
通过对比图,P=1,I=1时,蓝色是D=0.5,红色是D=0,此时比例系数都为1和积分系数都为1,随着微分系数从0增加到0.5,随着微分系数的增大,振荡次数明显降低,减小了响应的时长,微分环节使得响应时长减小,同时也大大减小了系统的超调量。
.


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· AI技术革命,工作效率10个最佳AI工具
2020-12-19 linux下库的使用--动态库
2020-12-19 linux下库的使用--静态库
2020-12-19 linux下程序编译的各个阶段记录
2020-12-19 ASCII码表
2019-12-19 python设计模式---单例模式
2019-12-19 python设计模式---绪论
2019-12-19 win10任务栏不显示垃圾的搜狗图标