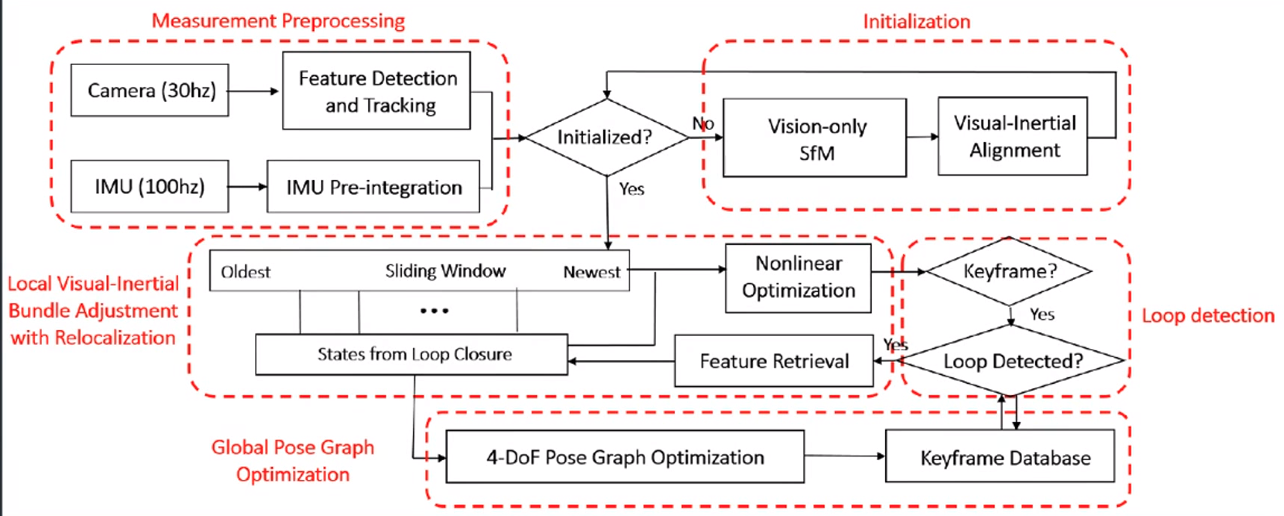
基本框架
基本框架如下图所示
![image-20191202164309191]()
![image-20191202163857217]()
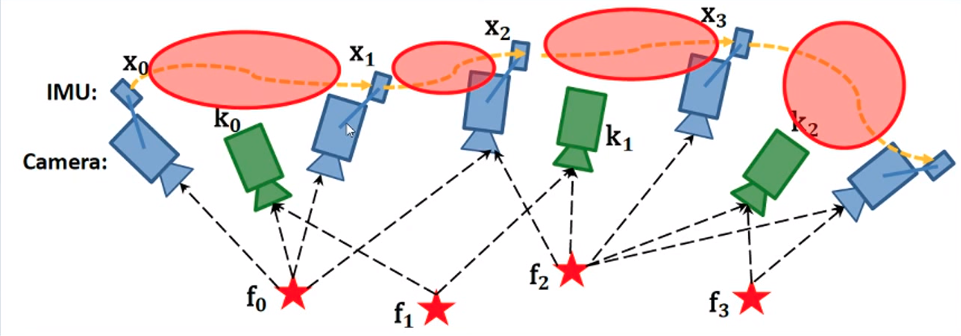
- 黄色的是IMU的帧间约束(PVQBaBg 15*1)
- 蓝色为视觉重投影误差约束(2*1)
- 绿色为闭环帧,用来计算相对位资,用于闭环优化时使用
- 红色的是IMU预计分步骤
本文重点看IMU约束与视觉约束
前端使用光流跟踪
- cv::goodfeaturesToTrack检测Harris角点
- cv::CalcOpticalFlowPyrLK跟踪相邻帧的角点
- cv::findFundamentalMat 去除异常点
- 统一的球面模型
关键帧选择机制
- 平均视差大于某个阈值
- 跟踪的特征点数量小于某个阈值
posted @
2020-02-14 16:00
少年笔谈
阅读(
343)
评论()
收藏
举报

 浙公网安备 33010602011771号
浙公网安备 33010602011771号