SLAM中的后端优化
本节介绍SLAM中的后端优化过程
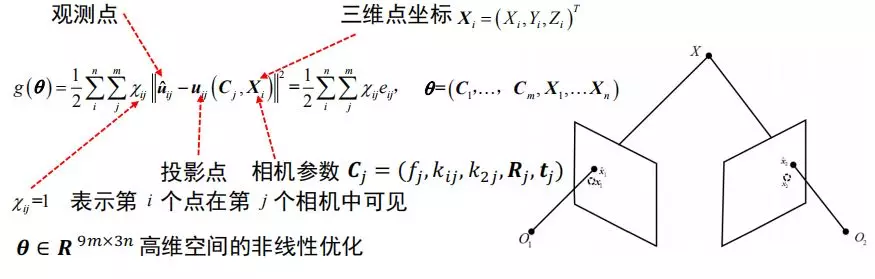
一、问题阐述
同时对三维点位置和相机参数进行非线性优化
二、LM法的原理与优势
原理:是一种“信赖域”的方法,当收敛速度较快时,增大信赖域使算法趋向于高斯牛顿法;当收敛速度较慢时,减小信赖域使算法趋向于最速下降法。
优势:速度快;可以在距离初始值较远处得到最优解。
SLAM优化算法对比
| 算法 | 缺点 | 优点 |
|---|---|---|
| KF/EKF | 假设噪声为高斯分布,在高维状态空间时计算效率较低,不适合大规模场景的地图构建 | 原理简单,小场景下收敛性好。 |
| PF | 会不可避免出现粒子退化现象,每个粒子需包含整张地图信息导致不适合大场景地图构建 | 将运动方程表示为一组粒子,通过蒙特卡罗方法求解,能够处理非线性非高斯噪声。 |
| EM | 计算量大,不能用于大规模场景 | 有效解决了数据关联问题 |
| 图优化 | 对闭环检测算法的要求严格 | 出现多种图优化框架,能够有效解决滤波器算法的缺陷,能用于大规模场景的地图创建 |

 浙公网安备 33010602011771号
浙公网安备 33010602011771号