VINS_Fusion 初始化过程
VINS_Fusion的初始化与VINS_mono差不多.
按照<<手写VIO>>课程中的说法
1. 背景技术
在介绍VINS的初始化模块之前,先介绍以下背景知识:
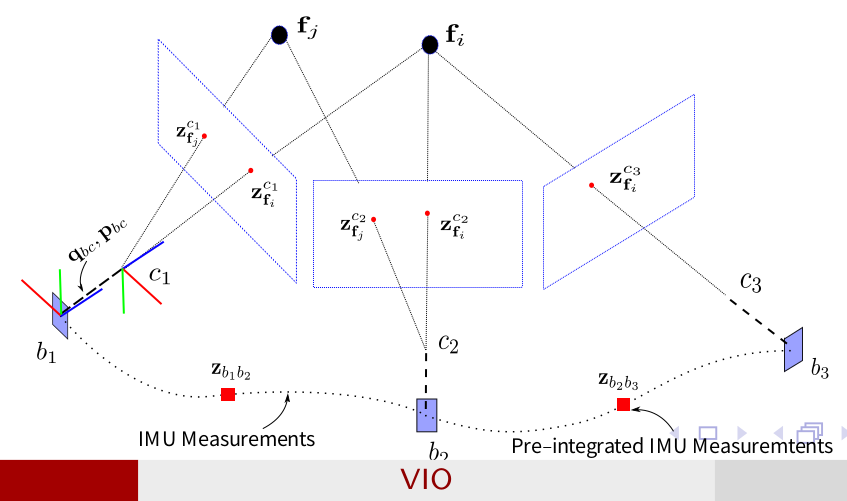
A.IMU预积分
IMU传感器模型可以表示为如下式子:
IMU 预积分即:将一段时间内的 IMU 数据直接积分起来就能得到两时刻 i, j 之间关于 IMU 的测量约束,即 预积分量:
上式中,位移增量为什么是伪位移增量呢,因为加速度为0的时候,相机的速度不一定为0;
根据上述的数学模型,我们可以计算两个时刻之间IMU的轨迹.
B.视觉几何基础
根据得到的两张图片,可以通过如下过程来计算相机的变换.
- 已知两图像:特征点提取,匹配(光流,特征描述子)
- 已知俩图像特征匹配点:利用对极几何约束 (E 矩阵,H 矩阵), 计算两图像之间的 pose (update to scale).
- 已知相机 pose, 已知特征点二维坐标: 通过三角化得到三维坐标.
- 已知 3d 点,2d 特征点:通过 Perspective-n-Point(PnP) 求取新的 相机 pose
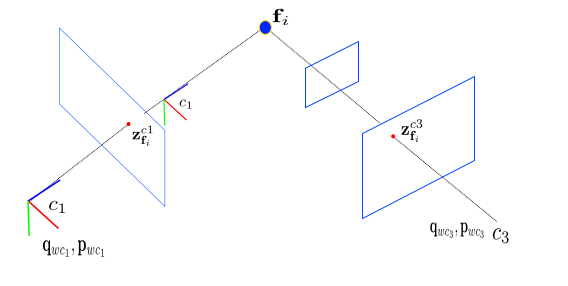
根据上述过程,我们可以根据相机的图片信息得到图片之间的变换.
两套轨迹带来的问题->如何融合?
根据前两个模型,我们得到了两套的轨迹.对于这两套轨迹,我门有以下问题:
- IMU 怎么和世界坐标系对齐,计算初始时刻的 \(q_{wb_0}\) ?
- 单目视觉姿态如何和 IMU 轨迹对齐,尺度如何获取?
- VIO 系统的初始速度 v,传感器 bias 等如何估计?
- IMU 和相机之间的外参数等...
VINS的初始化
1.视觉与IMU之间的联系
基于这些联系构建几何约束
考虑相机坐标系 \(c_0\) 为世界坐标系,则利用外参数 \(q_{bc} , t_{bc}\) 构建等式
带一横表示带了尺度。其中,s 为尺度因子,\(\overline{p}\) 表示非米制单位的轨迹。等式(3)等价于
旋转没有尺度信息。
通过该约束来与相机提供的约束打通关系。
2.视觉IMU对齐流程
估计流程
-
旋转外参数 \(q_{bc}\) 未知, 则先估计旋转外参数.(很多时候由于相机与IMU很近,因此平移参数不是很重要)
-
利用旋转约束估计陀螺仪 bias.(短时间内是个常数,因此需要估计以得到更准确的值)
\[q_{c_0b_k} = q_{c_0c_k} ⊗ q^{-1}_{bc} \] -
利用平移约束估计重力方向,速度,以及尺度初始值.(把非米制单位拉伸到米制单位)
\[s\overline{p}_{c_0b_k} = s\overline{p}_{c_0c_k} − R_{c_0b_k}p_{bc} \] -
对重力向量 \(g^{c_0}\) 进行进一步优化.
-
求解世界坐标系 w 和初始相机坐标系 \(c_0\) 之间的旋转矩阵 \(q_{wc_0}\),
并将轨迹对齐到世界坐标系。
A. 利用旋转约束估计外参数旋转\(Q_{bc}\)
相邻两时刻 k, k + 1 之间有:IMU旋转积分 \(q_{b_kb_{k+1}}\) ,视觉测量\(q_{c_kc_{k+1}}\) 。则有:
上式可写成:
其中,\([·]_L , [·]_R\) 表示 left and right quaternion multiplication。
将多个时刻线性方程(6)累计起来(提高信噪比),并加上鲁棒核权重得到:
其中
由旋转矩阵和轴角之间的关系 \(tr(R) = 1 + 2 cos θ\), 能得到角度误差 r
的计算为:
即从视觉数据计算得到的R应当与Q相同,因此括号中应该为一个单位矩阵
公式(7)的求解同样采用 SVD 分解,即最小奇异值对应的奇异向量。
具体代码见:initial_ex_rotation.cpp 函数 CalibrationExRotation()。
B. 基于旋转约束的Gyroscope Bias
-
估计bias可以使两个时刻之间IMU的旋转更准。因为旋转是通过积分得到的。
-
假定\(q_{c_kc_{k+1}}\)准确,且g估计到的外参准确,则\(q_{c_kb_k}\)准确.
如果外参数 \(q_{bc}\) 已标定好,利用旋转约束,可估计陀螺仪 bias:
其中, B 表示所有的图像关键帧集合,另有预积分的一阶泰勒近似:
\(q_{b_kb_{k+1}}\)的误差近似于第二项。
公式(10)为普通的最小二乘问题,求取雅克比矩阵,构建正定方程 HX = b =0 即可以求解 。
具体代码见:initial_aligment.cpp 函数 solveGyroscopeBias().
C. 初始化速度、重力和尺度因子
研究将IMU与相机对齐之后如何初始化速度、重力和尺度因子。
待估计变量
其中,\(v_k^{b_k}\)表示k时刻body 坐标系的速度在 body 坐标系下的表示。
\(g^{c_0}\)为重力向量在第 0 帧相机坐标系下的表示。s 表示尺度因子,将视
觉轨迹拉伸到米制单位。
回顾:预积分量约束
世界坐标系w下有
将世界坐标系 w 换成相机初始时刻坐标系 \(c_0\) 有
将公式(3)代入公式(14)进行简单整理有:
将待估计变量放到方程右边,有:


具体代码见:initial_aligment.cpp 函数 LinearAlignment().
D. 优化重力向量\(g^{c_0}\)
疑问:为什么需要优化重力向量
利用公式(16)求解重力向量 g_{c_0} 过程中,并没有加入模长限制
\(∥g^{c_0}∥ = 9.81\)。三维变量 \(g^{c_0}\) 实际只有两个自由度。
重力向量的参数化

三维向量自由度为 2,可以采用球面坐标
进行参数化:
其中,w1, w2 为待优化变量
将公式g代入,待优化变量变为:
公式中的观测方程变为:
然后采用最小二乘对\(\chi_I\)重新进行优化。
E. 将相机坐标系对齐到世界坐标系
对齐流程
-
找到 \(c_0\) 到 w 系的旋转矩阵 \(R_{wc_0} = \exp([θu])\)
\[$u =\frac{ĝ^{c_0}\times ĝ^w}{∥ĝ^{c_0}×ĝ^w∥} θ = atan2(∥ĝ^{c_0}\times ĝ^w ∥,ĝ^{c_0}·ĝ^w) \] -
把所有 \(c_0\) 坐标系下的变量旋转到 \(w\) 下。
-
把相机平移和特征点尺度恢复到米制单位。
-
至此,完成了系统初始化过程
初始化拓展
疑问
-
加速度 bias 为何没有估计? 加速度bias一般很小,不一定能估计出来,与重力向量相比,量纲很小
-
平移外参数 \(p_{bc}\) 为何没有初始化?
答:影响不大。1.陀螺仪的bias会影响旋转,旋转是一个非线性的东西,平移是线性的东西。旋转比平移重要。2. 平移外参一般在设备上很小,影响不大,可提前设置一个值,在后续中优化。
其他初始化方法
- 静止初始化:直接用加速度测量重力方向,初始速度为 0.
- 除 vins-mono 外的其他运动初始化方案 a , b 。
- Janne Mustaniemi et al. “Inertial-based scale estimation for structure from motion on mobile devices”. In: 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE. 2017, pp. 4394–4401.
- Javier Domínguez-Conti et al. “Visual-Inertial SLAM Initialization: A General Linear Formulation and a Gravity-Observing Non-Linear Optimization”. In: 2018 IEEE International Symposium on Mixed and Augmented Reality (ISMAR). IEEE. 2018, pp. 37–45.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号