视觉SLAM(二)三维空间刚体运动的描述
本文将一步一步探索如何描述三维空间中的刚体运动(平移+旋转)。
1.点与坐标系
在2D平面中,两个向量之间的变换可以用两个坐标加旋转角表达;
在3D空间中描述刚体需要一些别的概念来描述(略写),主要有:坐标系(参考系);点;向量;向量的坐标。
2.旋转矩阵
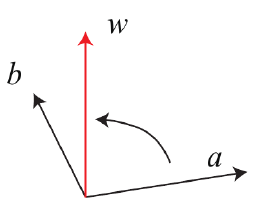
考虑一次旋转:坐标系\((e1,e2,e3)\)发生了旋转,变成\(e_1',e_2',e_3')\),而向量a不动,那么它的坐标如何变化?


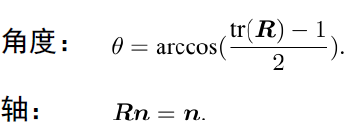
其中,𝑅称为旋转矩阵,可以验证:
• R是一个正交矩阵;
• R的行列式为+1。
• 满足这两个性质的矩阵称为旋转矩阵

•Special Orthogonal Group 特殊正交群
于是,1到2的旋转可表达为:\(𝑎_1=𝑅_{12}𝑎_2\),反之:\(𝑎_2=𝑅_{21}𝑎_1\)。(要注意下标顺序)
矩阵关系:\(𝑅_{21}=𝑅_{12}^{−1}=𝑅_{12}\)
3.旋转向量和欧拉角
旋转向量
除了旋转矩阵/变换矩阵之外,还存在其他的表示方式;旋转矩阵R有九个元素,但仅有三个自由度;能否以更少的元素表达旋转?
旋转向量:1.方向为旋转轴,长度为转过的角度;2.称为角轴/轴角(AngleAxis)或旋转向量(RotationVector)。
旋转向量与矩阵的不同:1.它仅有三个量 ;2.无约束;3. 更直观。它们可以是同一个旋转的不同表达方式。
罗德里格斯公式(Rodrigues’sFormula):
(可以想办法证明这个公式)
•旋转矩阵转向量:
欧拉角
欧拉角( Euler Angles)
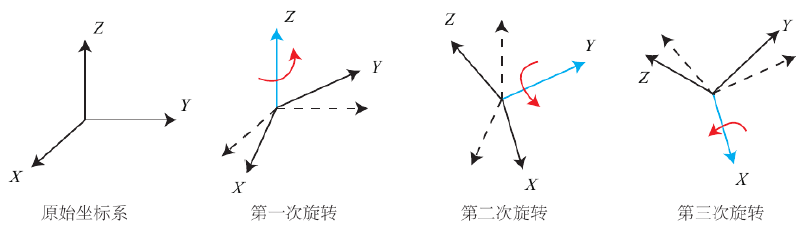
将旋转分解为三个方向上的转动例,按Z-Y-X顺序转动
轴可以是定轴或动轴,顺序亦可不同
常见的有:yaw-pitch-roll,东北天
不同领域的习惯有所不同
1.绕物体的乙轴旋转,得到偏航角yaw
2.绕旋转之后的Y轴旋转,得到俯仰角 pitch
3.绕旋转之后的X轴旋转,得到滚转角roll。
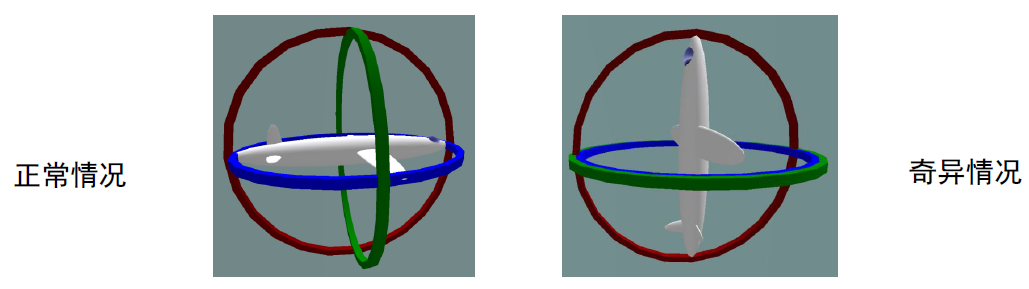
万向锁
- 欧拉角的奇异性问题
- 在特定值时,旋转自由度减1
- Yaw- pitch-rol顺序下,当 pitch为90度时,存在奇异性
![]()
4.四元数
旋转矩阵用9个量描述3自由度的旋转,具有冗余性;欧拉角和旋转向量是紧凑的,但具有奇异性。事实上,我们找不到不带奇异性的三维向量描述方式[19]。这有点类似于用两个坐标表示地球表面(如经度和纬度),将必定存在奇异性(纬度为+-90◦ 时经度无意义)。
四元数的描述
一个四元数q 拥有一个实部和三个虚部。如下:
\(q = q_0 + q_1i + q_2j + q_3k\);
其中i; j; k 为四元数的三个虚部。这三个虚部满足以下关系式:
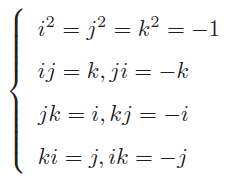
如果把i; j; k 看成三个坐标轴,那么它们与自己的乘法和复数一样,相互之间的乘法和外积一样。有时人们也用一个标量和一个向量来表达四元数:
\(q = [s; v]^T, s = q_0 \in R, v = [q_1; q_2; q_3]^T\in R^3\)
这里,s称为四元数的实部,而v称为它的虚部。如果一个四元数的虚部为0,称之为实四元数。反之,若它的实部为0,则称之为虚四元数
四元数的运算
四元数和通常复数一样,可以进行一系列的运算。常见的包括四则运算、数乘、求逆、共轭等。下面将分别介绍。
现有两个四元数\(q_a,q_b\),它们的向量表示为\([s_a; v_a]T; [s_b; v_b]T\),或者原始四元数表示为:
\(q_a = s_a + x_ai + y_aj + z_ak; q_b = s_b + x_bi + y_bj + z_bk\).

四元数到角轴:\(q=[cos(\theta/2).n_xsin(\theta/2),n_ysin(\theta/2),n_zsin(\theta/2)]\)
角轴到四元数:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号