
最大流
最大流:
定义:
有一张图,要求从源点流向汇点的最大流量(可以有很多条路到达汇点)
概念:
残量网络:
定义 \(c_f(u,v)\) 为边的流量之差,表示这条边的容量和流量之差,即:
对于流函数 \(f\) ,残存网络 \(G_f\) 是网络 \(G\) 中 所有节点和剩余容量大于 \(0\) 的边 构成的子图。
形式化的定义: \(G_f=(V_f=V,E_f=\left\{(u,v)\in E,c_f(u,v)>0\right\})\)
注意:剩余容量大于零的边可能不在原图 \(G\) 中。
残量网络中包括了那些还剩了流量空间的边构成的图,也包括反向边。
增广路:
在原图 \(G\) 中若一条从源点到汇点的路径上所有边的 剩余容量大于零,这条路就被称为增广路。
或者说,在残存网络 \(G_f\) 中,一条从源点到汇点的路径被称为增广路.
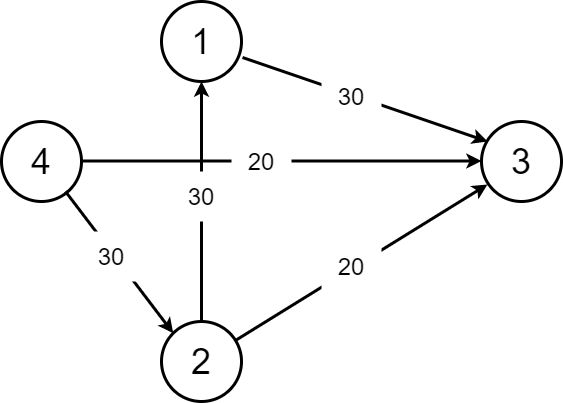
在这张图中,从 \(4 \rightarrow 3\), 先走 \(f_(4,3)=20\) 这条边。
然后判断 \(4 \rightarrow 2 \rightarrow 3\) 这条增广路 的总流量为 \(20\), \(4 \rightarrow 2 \rightarrow 1 \rightarrow 3\) 这条路总流量为 \(30\).
因此最大流就是 \(20+30=50\)
算法:
\(EK\) 算法:
思想:用 \(BFS\) 不断寻找增广路,直到网络上不存在增广路为止。
分析:
每轮寻找增广路的过程中,只考虑图中所有 \(f(u,v)<c(u,v)\) 的边,用 \(BFS\) 找到任意一条 \(s \rightarrow t\) 的路径,同时计算出路径上个边的剩余容量的最小值 \(minn\) ,则网络的流量可以增加 \(minn\)。
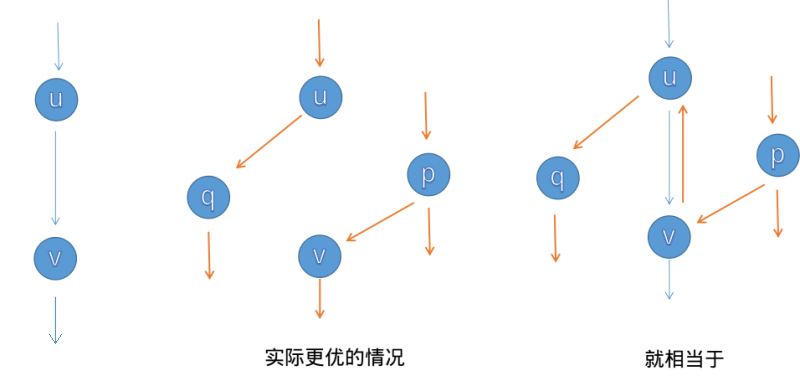
同时,当一条边流量 \(f(u,v)>0\) 时,我们需要建立反向边 \(f(v,u)=-f(u,v)\) ,此时必定有 \(f(y,x)<c(y,x)\) 。
在该算法中,我们需要遍历正反边,利用 邻接表成对存储 的技巧,也就是
\(2^1=3,3^1=2\) 这样能相互得到,存储标号从 \(2\) 开始。
对于每条边,我们只记录剩余容量 \(c(u,v)-f(u,v)\) 。
当一条边经过一条流量为 \(e\) 的边,令 \((u,v)\) 的剩余流量减少 \(e\) ,\((v,u)\) 的剩余容量增加 \(e\)。
想法就像这张图:
时间复杂度为 \(O(nm^2)\) ,时间复杂度较高
代码:
#include<bits/stdc++.h>
using namespace std;
const int N=1005,M=2e5+5,inf=0x3f3f3f3f;
#define ll long long
int head[N],nxt[M],ver[M],tot=1,edge[M];
int n,m,s,t;
ll maxflow;
int vis[N],incf[N],pre[N];
void add(int x,int y,int z){
ver[++tot]=y; nxt[tot]=head[x]; head[x]=tot; edge[tot]=z;
ver[++tot]=x; nxt[tot]=head[y]; head[y]=tot; edge[tot]=0;
}
void update(){
int x=t;
while(x!=s){
int i=pre[x];
edge[i]-=incf[t]; edge[i^1]+=incf[t];
x=ver[i^1]; //继续回溯
}
maxflow+=incf[t];
}
bool bfs(){
memset(vis,0,sizeof(vis)); queue<int> q; q.push(s); vis[s]=1;
incf[s]=inf;//各边剩余最小容量
while(!q.empty()){
int x=q.front(); q.pop();
for(int i=head[x]; i; i=nxt[i]){
int y=ver[i],z=edge[i];
if(vis[y]||!z) continue;
incf[y]=min(incf[x],z);//限制流量和当前点能流的最大流量比较
pre[y]=i;//记录前驱,用来找到最长路的实际方案
q.push(y); vis[y]=1;
if(y==t) return 1;
}
}
return 0;
}
int main(){
cin>>n>>m>>s>>t;
for(int i=1,x,y,z;i<=m;i++){
scanf("%d%d%d",&x,&y,&z); add(x,y,z);
}
while(bfs()) update();//证明有一条新边可以更新
cout<<maxflow<<endl;
system("pause");
return 0;
}
\(Dinic\) 算法:
\(EK\) 每轮会遍历整个残量网络,但只能找出一条增广路,属实是拉了属于是
我们可以利用 分层图 的性质(即满足 \(dep[u]+1=dep[v]\) 的边 \((u,v)\) 构成的子图) 。
流程:
-
在残量网络上 \(BFS\) 求出节点的层次,构造分层图。
-
在分层图上 \(DFS\) 寻找增广路,在回溯时实时更新剩余容量,另外,各个点可以流向多条出边,同时还需要剪枝等操作。
时间复杂度为 \(O(n^2m)\) ,实际上会更优。
当前弧优化:
每次增广一条路后可以看做 榨干 了这条路,既然榨干了就没有再增广的可能了。
但如果每次都扫描这些枯萎的边是很浪费时间的。
那我们就记录一下榨取到那条边了,然后下一次直接从这条边开始增广,就可以节省大量的时间。这就是 当前弧优化。
具体怎么实现呢,先把链式前向星的 \(head\) 数组复制一份,存进 \(cur\) 数组,然后在 \(cur\) 数组中每次记录“榨取”到哪条边了。
代码:
#include<bits/stdc++.h>
using namespace std;
#define ll long long
const int inf=0x3f3f3f3f,N=5005,M=200005;
int nxt[M],ver[M],tot=1,edge[M],head[N];
int n,m,s,t;
ll maxflow;
int dep[N],incf[N],pre[N],cur[N];
void add(int x,int y,int z){
ver[++tot]=y; edge[tot]=z; nxt[tot]=head[x]; head[x]=tot;
ver[++tot]=x; edge[tot]=0; nxt[tot]=head[y]; head[y]=tot;
}
bool bfs(){
memset(dep,0,sizeof(dep)); queue<int> q; q.push(s); dep[s]=1;
while(!q.empty()){
int x=q.front(); q.pop();
for(int i=head[x];i;i=nxt[i]){
int y=ver[i],z=edge[i];
if(dep[y]||!z) continue;
q.push(y);
dep[y]=dep[x]+1;
if(y==t) return 1;
}
}
return 0;
}
int dinic(int x,int flow){//flow表示限制流量
if(x==t) return flow;
int totflow=0;//从这个点总共可以增广多少流量
for(int i=cur[x];i;i=nxt[i]){
cur[x]=i;//记录上一次增广到哪条边了
int y=ver[i],z=edge[i];
if(dep[y]!=dep[x]+1||!edge[i]) continue;
int canflow=dinic(y,min(flow,z));//表示这条增广路上能增加多少流量
edge[i]-=canflow; edge[i^1]+=canflow;
totflow+=canflow;//总共增加多少流量
flow-=canflow;
if(flow<=0) break;//当前点已经没有流量
}
return totflow;
}
int main(){
cin>>n>>m>>s>>t;
for(int i=1,x,y,z;i<=m;i++){
scanf("%d%d%d",&x,&y,&z); add(x,y,z);
}
while(bfs()){
memcpy(cur,head,sizeof(head));
maxflow+=dinic(s,inf);
}
cout<<maxflow<<endl;
system("pause");
return 0;
}

