
[Cubemx][HAL]使用STM32自带的IIC驱动mpu6050---2
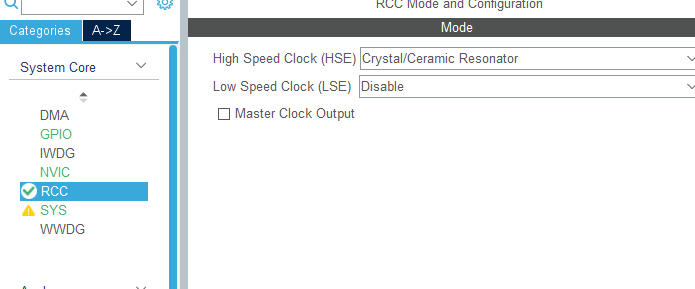
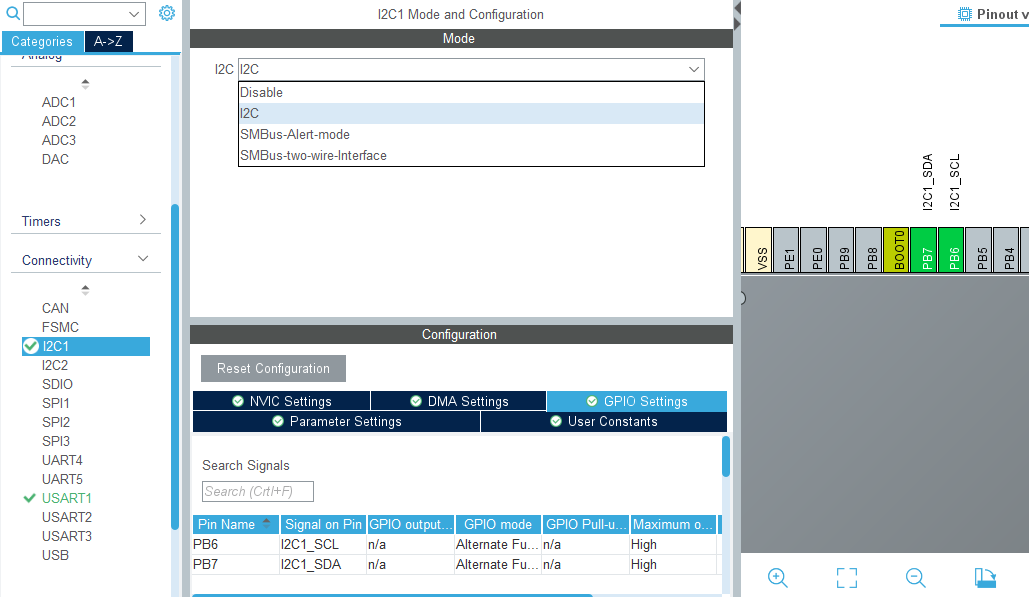
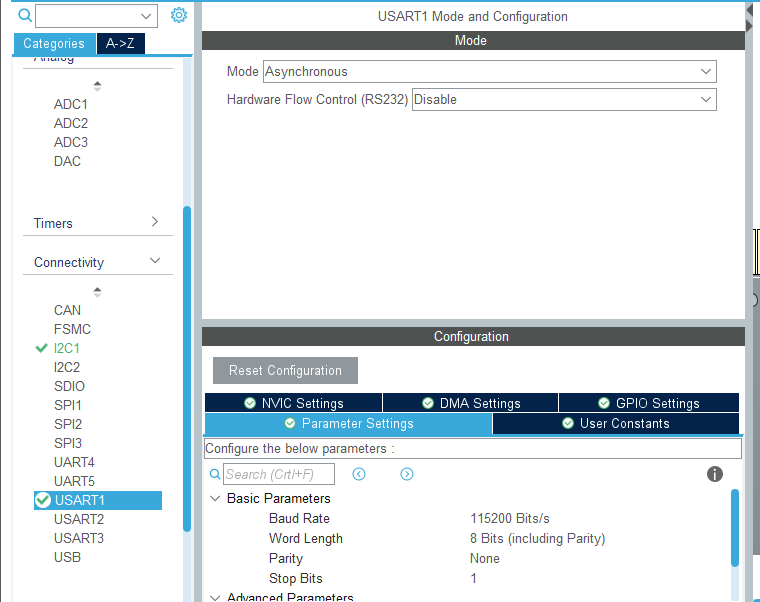
Cubemx配置部分
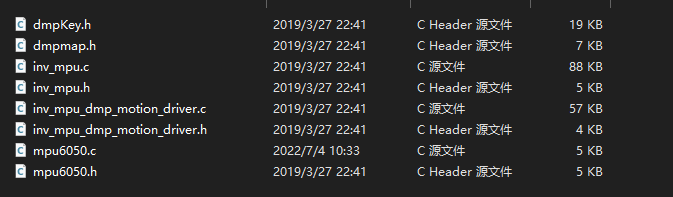
代码部分
主要用到这几个
下载:sysbrk/STM32-HAL-MPU6050-DMP解算获取角度和温度 - 码云 - 开源中国 (gitee.com)
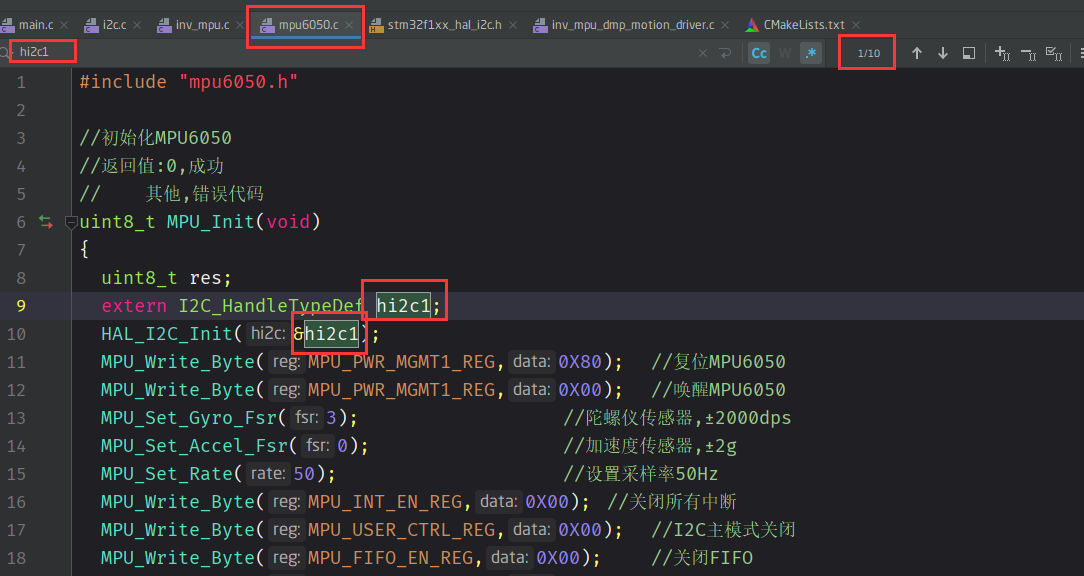
在移植的时候记得改mpu6050.c里的这10个地方:
如果用的是I2C1那就不用改,是其它的话要改
主函数:
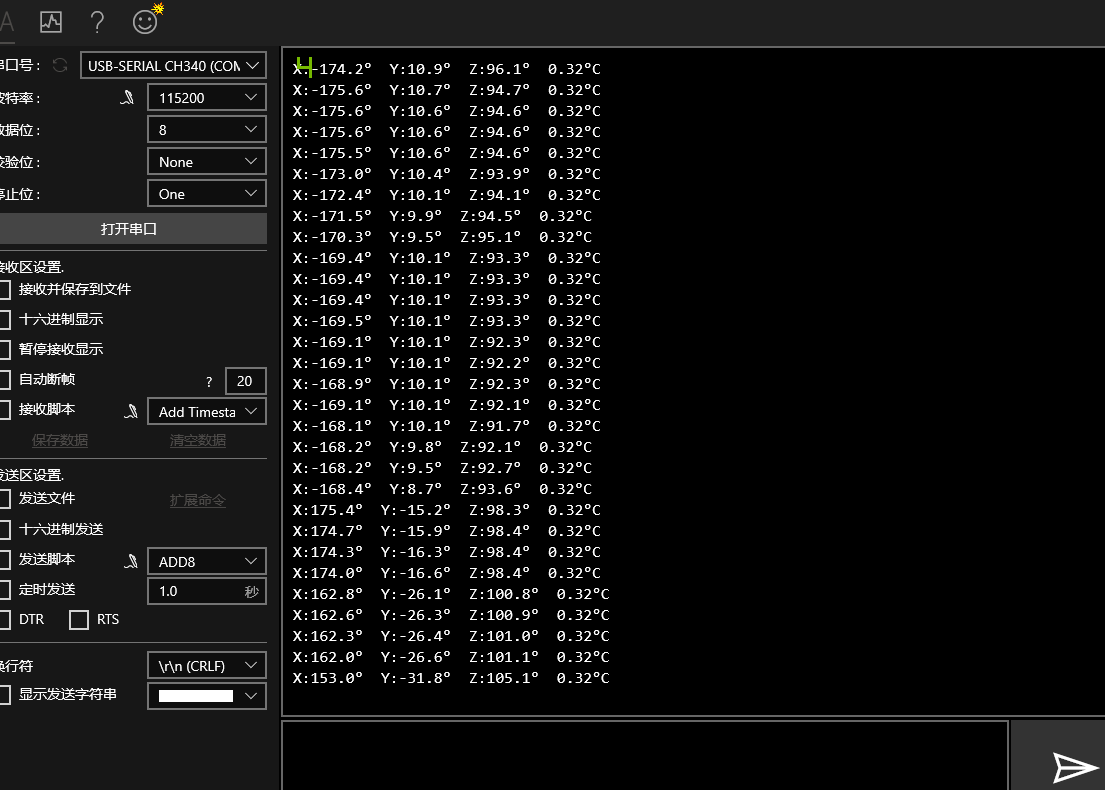
/* Includes ------------------------------------------------------------------*/ #include "main.h" #include "i2c.h" #include "usart.h" #include "gpio.h" /* Private includes ----------------------------------------------------------*/ /* USER CODE BEGIN Includes */ #include "stdio.h" #include "mpu6050.h" #include "inv_mpu.h" #include "inv_mpu_dmp_motion_driver.h" /* USER CODE END Includes */ /* Private typedef -----------------------------------------------------------*/ /* USER CODE BEGIN PTD */ /* USER CODE END PTD */ /* Private define ------------------------------------------------------------*/ /* USER CODE BEGIN PD */ /* USER CODE END PD */ /* Private macro -------------------------------------------------------------*/ /* USER CODE BEGIN PM */ /* USER CODE END PM */ /* Private variables ---------------------------------------------------------*/ /* USER CODE BEGIN PV */ /* USER CODE END PV */ /* Private function prototypes -----------------------------------------------*/ void SystemClock_Config(void); /* USER CODE BEGIN PFP */ /* USER CODE END PFP */ /* Private user code ---------------------------------------------------------*/ /* USER CODE BEGIN 0 */ int __io_putchar(int ch) { uint8_t temp[1] = {ch}; HAL_UART_Transmit(&huart1, temp, 1, 0xff); return (ch); } /* USER CODE END 0 */ /** * @brief The application entry point. * @retval int */ int main(void) { /* USER CODE BEGIN 1 */ float pitch, roll, yaw; //欧拉角 short aacx, aacy, aacz; //加速度传感器原始数据 short gyrox, gyroy, gyroz; //陀螺仪原始数据 float temp; //温度 /* USER CODE END 1 */ /* MCU Configuration--------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_I2C1_Init(); MX_USART1_UART_Init(); /* USER CODE BEGIN 2 */ MPU_Init(); mpu_dmp_init(); printf("初始化成功!\n"); /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { HAL_Delay(500); while (mpu_dmp_get_data(&pitch, &roll, &yaw)); //必须要用while等待,才能读取成功 MPU_Get_Accelerometer(&aacx, &aacy, &aacz); //得到加速度传感器数据 MPU_Get_Gyroscope(&gyrox, &gyroy, &gyroz); //得到陀螺仪数据 temp = MPU_Get_Temperature(); //得到温度信息 printf("X:%.1f° Y:%.1f° Z:%.1f° %.2f°C\r\n", roll, pitch, yaw, temp / 100);//串口1输出采集信息 /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */ }
输出:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号