source impl - 网格差异可视化
source impl - 网格差异可视化
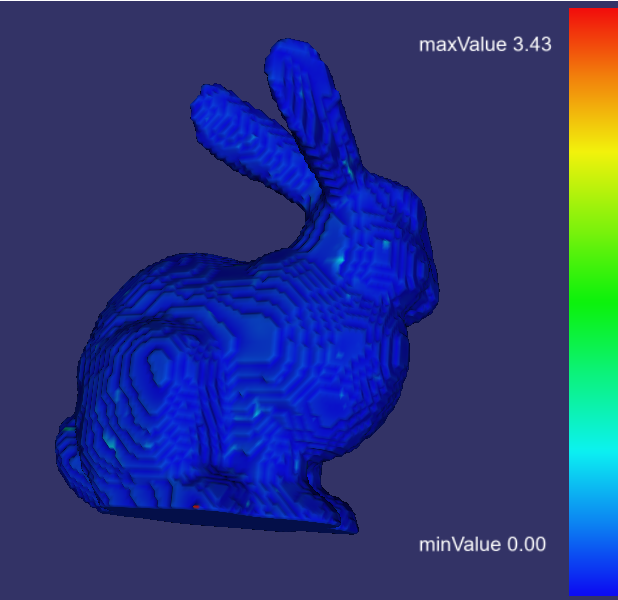
[[paper-1998-metro-measuring-error-on-simplified-surfaces]] 介绍了网格近似误差的计算。这里需要完成的是输入两个网格(通常是基准网格和变化后的网格,如精简,重新生成,细分等)。计算变化后的网格上的所有的顶点,相对于基准网格的距离,然后对变化后的网格进行绘制,并将距离用伪彩的颜色进行显示。
此处借助八叉树的空间划分结构。划分的对象为三角网格的顶点,八叉树的实现参考:brandonpelfrey/SimpleOctree: A simple octree with good commenting for learning how octrees work. (github.com)
空间划分结束后,遍历变化后的网格的所有顶点v_i,在构建的八叉树中查找对应的box。从该box中取出含有的基准网格的顶点v_j。然后计算v_i和v_j相邻三角形的最短距离,即为最后计算得到的结果。伪代码如下:
# input: triMesh, triMeshBase
# output: triMesh with min distance vertex property
octree = constructOctree(triMeshBase)
for vertex in triMesh:
leaf = octree.findLeaf(vertex)
for vertexBase in leaf:
for triangle around vertexBase:
vertex.minDis = min(vertex.minDis, distance(vertex, triangle))
openmesh 顶点划分的八叉树
如果直接利用链接中的实现,对点云进行八叉树划分,那么点对应的面,边的拓扑信息就会丢失,因此,这里对原来的实现进行了更改,使得每个叶子节点存储openmesh的顶点handle,这样就很方便获取拓扑信息。同时对八叉树的深度进行了限制。
利用八叉树,可以找到某个点最近的顶点,然后获取该顶点周围的三角形,进一步计算顶点和三角形之间的距离,此处可以参考:GeometricTools/DistPointTriangle.h at master · davideberly/GeometricTools (github.com) 。
八叉树的主要代码如下:
// ref: https://github.com/brandonpelfrey/SimpleOctree
// https://www.cnblogs.com/Glucklichste/p/11505743.html
#ifndef OPENMESH_Octree_H
#define OPENMESH_Octree_H
#include <cstddef>
#include <vector>
#include "openmesh_typedef.h"
#include "openmesh_utils.h"
/**!
* Octree data struct used for openmesh datastruct
*/
class OpenMeshOctree {
/*
Children follow a predictable pattern to make accesses simple.
Here, - means less than 'origin' in that dimension, + means greater than.
child: 0 1 2 3 4 5 6 7
x: - - - - + + + +
y: - - + + - - + +
z: - + - + - + - +
*/
public:
OpenMeshOctree(const TriMesh& triMesh, const TriMesh::Point& origin, const TriMesh::Point& halfDimension, unsigned int currentDepth)
: triMesh_(triMesh), origin_(origin), halfDimension_(halfDimension), currentDepth_(currentDepth)
{
// Initially, there are no children
for(int i=0; i<8; ++i)
children_[i] = nullptr;
}
OpenMeshOctree(const OpenMeshOctree& copy) = delete;
~OpenMeshOctree()
{
// Recursively destroy octants
for (int i = 0; i < 8; ++i)
{
if (children_[i])
delete children_[i];
}
}
void Insert(const TriMesh::VertexHandle& vh) {
if (currentDepth_ == 0) // Reach the max depth
{
data_.insert(vh);
return;
}
else if (!hasChild_ && data_.empty()) // the current node has no data and has no child
{
data_.insert(vh);
return;
}
else if (!hasChild_ && !data_.empty()) // the current node has no child and has data
{
// We're at a leaf, but there's already something here
// We will split this node so that it has 8 child octants
// and then insert the old data that was here, along with
// this new data point
std::set<TriMesh::VertexHandle> oldData;
oldData.swap(data_);
assert(oldData.size() == 1);
// only create used child
int idxChild0 = GetOctantContainingPoint(*oldData.begin());
int idxChild1 = GetOctantContainingPoint(vh);
int idxChild[] = { idxChild0, idxChild1 };
int idxChildCount = idxChild0 == idxChild1 ? 1 : 2;
for (int i = 0; i < idxChildCount; ++i)
{
if (children_[idxChild[i]] == nullptr)
{
TriMesh::Point newOrigin = origin_;
newOrigin[0] += halfDimension_[0] * (idxChild[i] & 4 ? .5f : -.5f);
newOrigin[1] += halfDimension_[1] * (idxChild[i] & 2 ? .5f : -.5f);
newOrigin[2] += halfDimension_[2] * (idxChild[i] & 1 ? .5f : -.5f);
children_[idxChild[i]] = new OpenMeshOctree(triMesh_, newOrigin, halfDimension_ * .5f, currentDepth_ - 1);
}
}
// Re-insert the old point, and insert this new point
// (We wouldn't need to insert from the root, because we already
// know it's guaranteed to be in this section of the tree)
children_[idxChild0]->Insert(*oldData.begin());
children_[idxChild1]->Insert(vh);
hasChild_ = true;
}
else
{
// We are at an interior node. Insert recursively into the
// appropriate child octant
int octant = GetOctantContainingPoint(vh);
if (children_[octant] == nullptr)
{
TriMesh::Point newOrigin = origin_;
newOrigin[0] += halfDimension_[0] * (octant & 4 ? .5f : -.5f);
newOrigin[1] += halfDimension_[1] * (octant & 2 ? .5f : -.5f);
newOrigin[2] += halfDimension_[2] * (octant & 1 ? .5f : -.5f);
children_[octant] = new OpenMeshOctree(triMesh_, newOrigin, halfDimension_ * .5f, currentDepth_ - 1);
}
children_[octant]->Insert(vh);
}
}
// The PointType must support
// pt[0], pt[1], pt[2] to access the coordinate value
template <typename PointType>
void GetNodeContainPoint(const PointType& pt, OpenMeshOctree*& result)
{
// Compute the min/max corners of this child octant
auto cmax = origin_ + halfDimension_;
auto cmin = origin_ - halfDimension_;
// If the query rectangle is outside the child's bounding box,
// then continue
if (cmax[0] < pt[0] || cmax[1] < pt[1] || cmax[2] < pt[2]) return;
if (cmin[0] > pt[0] || cmin[1] > pt[1] || cmin[2] > pt[2]) return;
result = this;
bool isLeafNode = !hasChild_ || currentDepth_ == 0;
if (!isLeafNode)
{
for (int i = 0; i < 8; ++i) {
if (children_[i] == nullptr) continue;
// At this point, we've determined that this child is containing the pt
children_[i]->GetNodeContainPoint(pt, result);
}
}
}
void GetDataInCurrentNode(std::set<TriMesh::VertexHandle>& data)
{
bool isLeafNode = !hasChild_ || currentDepth_ == 0;
if (isLeafNode)
{
data.insert(data_.begin(), data_.end());
}
else
{
for (int i = 0; i < 8; ++i)
{
if (children_[i] == nullptr) continue;
children_[i]->GetDataInCurrentNode(data);
}
}
}
private:
// Determine which octant of the tree would contain 'point'
int GetOctantContainingPoint(const TriMesh::VertexHandle& vh) const {
const TriMesh::Point& point = triMesh_.point(vh);
int oct = 0;
if (point[0] >= origin_[0]) oct |= 4;
if (point[1] >= origin_[1]) oct |= 2;
if (point[2] >= origin_[2]) oct |= 1;
return oct;
}
const TriMesh& triMesh_;
// Physical position/size. This implicitly defines the bounding
// box of this node
TriMesh::Point origin_; //! The physical center of this node
TriMesh::Point halfDimension_; //! Half the width/height/depth of this node
// The tree has up to eight children and can additionally store
// a point, though in many applications only, the leaves will store data.
OpenMeshOctree* children_[8]; //! Pointers to child octants
std::set<TriMesh::VertexHandle> data_; //! Data point to be stored at a node
unsigned int currentDepth_ = 0; // The depth of root is max, the depth of leaf node is 0 or all child is null
bool hasChild_ = false;
};
/// \brief Create octree data struct from openmesh trimesh
/// \param[in] trimesh input triangle mesh
/// \param[in] maxDepth max depth of octree, the depth is from 16(root) to 0
OpenMeshOctree* CreateOpenMeshOctree(const TriMesh& trimesh, unsigned int maxDepth = 16)
{
TriMesh::Point low, high;
GetTriMeshBoundingBox(trimesh, low, high);
TriMesh::Point center = (low + high) * 0.5;
TriMesh::Point halfDimension = (high - low) * 0.5;
OpenMeshOctree* root = new OpenMeshOctree(trimesh, center, halfDimension, maxDepth);
for (auto vh : trimesh.vertices())
{
root->Insert(vh);
}
return root;
}
OpenMeshOctree* CreateOpenMeshOctree(const TriMesh& trimesh, const TriMesh::Point& low, const TriMesh::Point& high, unsigned int maxDepth = 16)
{
TriMesh::Point center = (low + high) * 0.5;
TriMesh::Point halfDimension = (high - low) * 0.5;
OpenMeshOctree* root = new OpenMeshOctree(trimesh, center, halfDimension, maxDepth);
for (auto vh : trimesh.vertices())
{
root->Insert(vh);
}
return root;
}
#endif
OSG可视化结果
作者: grassofsky
出处: http://www.cnblogs.com/grass-and-moon
本文版权归作者,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出, 原文链接 如有问题, 可邮件(grass-of-sky@163.com)咨询.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号