

CGAL - SourceCode - Intersection_of_triangle_meshes 源码阅读
CGAL - SourceCode - Intersection_of_triangle_meshes 源码阅读
CGAL\Polygon_mesh_processing\internal\Corefinement\intersection_impl.h
基本原理
该functor用来计算三角形网格的两两相交。相交结果是polylines(多线段)。该算法的基本步骤如下:
每个三角形网格中,我们从边中提取出segments集合,从面中,提取出三角形集合。
第一步:利用Box_intersection_d粗筛
我们使用Box_intersection_d过滤出一个三角网格segments和另一个三角网格相交的区域。
第二步:求交
从这个过滤的集合中,每个(segment,triangle)对,我们查看相交类型。
-
segment和三角形内部相交:我们计算出相交的交点,对于每个与线段相关的面,我们保存交点和相交三角形的面的关系;
-
segment和三角形的边相交:计算相交的交点,保留这条边相关的三角形;
-
segment和三角形顶点相交:执行和2)相同的操作;
注意给定一对(段,三角形)=(S,T),如果S属于T所在的平面,满足下面情况的话,我们不做任何事情:
-
没有三角形T'包含S使得T和T'共面
-
至少有一个三角形包含S
特殊步骤:共面处理
共面的三角形被过滤出来单独处理。
具体实现
Operator()全览
template <class OutputIterator>
OutputIterator operator()(OutputIterator output,
bool throw_on_self_intersection,
bool build_polylines)
{
CGAL_assertion(!doing_autorefinement);
const TriangleMesh& tm1=nodes.tm1; // 第一个三角网格
const TriangleMesh& tm2=nodes.tm2; // 第二个三角网格
const VertexPointMap& vpm1=nodes.vpm1; // 第一个vertex point map
const VertexPointMap& vpm2=nodes.vpm2; // 第二个vertex point map
// 第一步:利用Box_intersection_d过滤出有交集的部分
// filter_intersections介绍详细见后面
filter_intersections(tm1, tm2, vpm1, vpm2, throw_on_self_intersection);
filter_intersections(tm2, tm1, vpm2, vpm1, throw_on_self_intersection);
Node_id current_node((std::numeric_limits<Node_id>::max)());
CGAL_assertion(current_node+1==0);
// 特殊步骤:处理共面的情况
#ifndef DO_NOT_HANDLE_COPLANAR_FACES
//first handle coplanar triangles
if (&tm1<&tm2)
compute_intersection_of_coplanar_faces(current_node, tm1, tm2, vpm1, vpm2);
else
compute_intersection_of_coplanar_faces(current_node, tm2, tm1, vpm2, vpm1);
visitor.set_number_of_intersection_points_from_coplanar_faces(current_node+1);
if (!coplanar_faces.empty())
visitor.input_have_coplanar_faces();
#endif // not DO_NOT_HANDLE_COPLANAR_FACES
// 第二步:求交
//compute intersection points of segments and triangles.
//build the nodes of the graph and connectivity infos
Edge_to_faces& tm1_edge_to_tm2_faces = (&tm1<&tm2)
? stm_edge_to_ltm_faces
: ltm_edge_to_stm_faces;
Edge_to_faces& tm2_edge_to_tm1_faces = (&tm1>&tm2)
? stm_edge_to_ltm_faces
: ltm_edge_to_stm_faces;
// 计算交点,详细见后文
compute_intersection_points(tm1_edge_to_tm2_faces, tm1, tm2, vpm1, vpm2, current_node);
compute_intersection_points(tm2_edge_to_tm1_faces, tm2, tm1, vpm2, vpm1, current_node);
if (!build_polylines){
visitor.finalize(nodes,tm1,tm2,vpm1,vpm2);
return output;
}
//remove duplicated intersecting edges:
// In case two faces are incident along an intersection edge coplanar
// in a face of another polyhedron (and one extremity inside the face),
// the intersection will be reported twice. We kept track
// (check_coplanar_edge(s)) of this so that,
// we can remove one intersecting edge out of the two
remove_duplicated_intersecting_edges();
// 构建多线段,详细见后文
//using the graph approach (at some point we know all
// connections between intersection points)
construct_polylines(output);
visitor.finalize(nodes,tm1,tm2,vpm1,vpm2);
return output;
}
filter_intersections全览
box_intersection_d使用的介绍可以参见:https://www.cnblogs.com/grass-and-moon/p/13219926.html
void filter_intersections(const TriangleMesh& tm_f,
const TriangleMesh& tm_e,
const VertexPointMap& vpm_f,
const VertexPointMap& vpm_e,
bool throw_on_self_intersection)
{
std::vector<Box> face_boxes, edge_boxes;
// 使用指针可以提高box_intersection_d速度
std::vector<Box*> face_boxes_ptr, edge_boxes_ptr;
// 遍历获取tm_f面片的box
face_boxes.reserve(num_faces(tm_f));
face_boxes_ptr.reserve(num_faces(tm_f));
BOOST_FOREACH(face_descriptor fd, faces(tm_f))
{
halfedge_descriptor h=halfedge(fd,tm_f);
face_boxes.push_back( Box(
get(vpm_f,source(h,tm_f)).bbox() +
get(vpm_f,target(h,tm_f)).bbox() +
get(vpm_f,target(next(h,tm_f),tm_f)).bbox(),
h ) );
face_boxes_ptr.push_back( &face_boxes.back() );
}
// 遍历获取tm_e边的box
edge_boxes.reserve(num_edges(tm_e));
edge_boxes_ptr.reserve(num_edges(tm_e));
BOOST_FOREACH(edge_descriptor ed, edges(tm_e))
{
halfedge_descriptor h=halfedge(ed,tm_e);
edge_boxes.push_back( Box(
get(vpm_e,source(h,tm_e)).bbox() +
get(vpm_e,target(h,tm_e)).bbox(),
h ) );
edge_boxes_ptr.push_back( &edge_boxes.back() );
}
/// \todo experiments different cutoff values
std::ptrdiff_t cutoff = 2 * std::ptrdiff_t(
std::sqrt(face_boxes.size()+edge_boxes.size()) );
Edge_to_faces& edge_to_faces = &tm_e < &tm_f
? stm_edge_to_ltm_faces // 较小地址的网格的边和较大地址的网格面组成的map
: ltm_edge_to_stm_faces; // 较大地址的网格的边和较小地址的网格面组成的map
#ifdef DO_NOT_HANDLE_COPLANAR_FACES
typedef Collect_face_bbox_per_edge_bbox<TriangleMesh, Edge_to_faces>
Callback;
Callback callback(tm_f, tm_e, edge_to_faces);
#else
typedef Collect_face_bbox_per_edge_bbox_with_coplanar_handling<
TriangleMesh, VertexPointMap, Edge_to_faces, Coplanar_face_set>
Callback;
Callback callback(tm_f, tm_e, vpm_f, vpm_e, edge_to_faces, coplanar_faces);
#endif
//using pointers in box_intersection_d is about 10% faster
if (throw_on_self_intersection){
Callback_with_self_intersection_report<TriangleMesh, Callback> callback_si(callback);
CGAL::box_intersection_d( face_boxes_ptr.begin(), face_boxes_ptr.end(),
edge_boxes_ptr.begin(), edge_boxes_ptr.end(),
callback_si, cutoff );
if (callback_si.self_intersections_found())
throw Self_intersection_exception();
}
else
CGAL::box_intersection_d( face_boxes_ptr.begin(), face_boxes_ptr.end(),
edge_boxes_ptr.begin(), edge_boxes_ptr.end(),
callback, cutoff );
}
该函数计算一个网格的三角面的box和另一个网格边的box的相交。并利用回调函数对相交的box进行进一步的处理。接着就需要看一下回调函数做了什么事情。此处先假设不做共面处理,自相交不抛出异常。那么只需要Collect_face_bbox_per_edge_bbox的实现即可。
Collect_face_bbox_per_edge_bbox
代码位于:CGAL\Polygon_mesh_processing\internal\Corefinement\intersection_callbacks.h
template<class TriangleMesh, class EdgeToFaces>
class Collect_face_bbox_per_edge_bbox {
protected:
const TriangleMesh& tm_faces;
const TriangleMesh& tm_edges;
EdgeToFaces& edge_to_faces;
typedef boost::graph_traits<TriangleMesh> Graph_traits;
typedef typename Graph_traits::face_descriptor face_descriptor;
typedef typename Graph_traits::halfedge_descriptor halfedge_descriptor;
typedef typename CGAL::Box_intersection_d::Box_with_info_d<double, 3, halfedge_descriptor> Box;
public:
Collect_face_bbox_per_edge_bbox(
const TriangleMesh& tm_faces,
const TriangleMesh& tm_edges,
EdgeToFaces& edge_to_faces)
: tm_faces(tm_faces)
, tm_edges(tm_edges)
, edge_to_faces(edge_to_faces)
{}
// 记录相交的半边和面片的关系
void operator()( const Box& face_box, const Box& edge_box) const
{
halfedge_descriptor fh = face_box.info();
halfedge_descriptor eh = edge_box.info();
edge_to_faces[eh].insert(face(fh, tm_faces));
}
void operator()( const Box* face_box_ptr, const Box* edge_box_ptr) const
{
operator()(*face_box_ptr, *edge_box_ptr);
}
};
执行完之后就得到了相交的边和面的对应关系了。接下来执行交点计算。
compute_intersection_points
void compute_intersection_points(Edge_to_faces& tm1_edge_to_tm2_faces,
const TriangleMesh& tm1,
const TriangleMesh& tm2,
const VertexPointMap& vpm1,
const VertexPointMap& vpm2,
Node_id& current_node)
{
// tuple<相交类型,相交面上的halfedge,p点是否在面上,q点是否在面上
typedef cpp11::tuple<Intersection_type, halfedge_descriptor, bool,bool> Inter_type;
for(typename Edge_to_faces::iterator it=tm1_edge_to_tm2_faces.begin();
it!=tm1_edge_to_tm2_faces.end();++it)
{
edge_descriptor e_1=it->first;
halfedge_descriptor h_1=halfedge(e_1,tm1);
Face_set& fset=it->second;
while (!fset.empty()){
face_descriptor f_2=*fset.begin();
// 计算相交类型,Intersection_type的类型有:
// EMPTY: 不相交
// ON_FACE:交点在三角面上
// ON_EDGE:交点在边上
// ON_VERTEX: 交点在顶点上
Inter_type res=intersection_type(h_1,f_2,tm1,tm2,vpm1,vpm2);
Intersection_type type=cpp11::get<0>(res);
// 获取所有相关的边,
// 如果边穿过面,那么就是这条边;
// 如果边的一个点在面上,那么就是这个点相关的所有的边;
//handle degenerate case: one extremity of edge belong to f_2
std::vector<halfedge_descriptor> all_edges;
if ( cpp11::get<3>(res) ) // is edge target in triangle plane
std::copy(halfedges_around_target(h_1,tm1).first,
halfedges_around_target(h_1,tm1).second,
std::back_inserter(all_edges));
else{
if ( cpp11::get<2>(res) ) // is edge source in triangle plane
std::copy(halfedges_around_source(h_1,tm1).first,
halfedges_around_source(h_1,tm1).second,
std::back_inserter(all_edges));
else
all_edges.push_back(h_1);
}
CGAL_precondition(all_edges[0]==h_1 || all_edges[0]==opposite(h_1,tm1));
// #ifdef USE_DETECTION_MULTIPLE_DEFINED_EDGES
// check_coplanar_edges(cpp11::next(all_edges.begin()),
// all_edges.end(),CGAL::cpp11::get<1>(res),type);
// #endif
typename std::vector<halfedge_descriptor>::iterator it_edge=all_edges.begin();
switch(type){
case COPLANAR_TRIANGLES:
#ifndef DO_NOT_HANDLE_COPLANAR_FACES
assert(!"COPLANAR_TRIANGLES : this point should never be reached!");
#else
//nothing needs to be done, cf. comments at the beginning of the file
#endif
break;
case EMPTY:
fset.erase(fset.begin());
break;
// Case when the edge pierces the face in its interior.
// 处理交点在三角形面内的情况
case ON_FACE:
{
CGAL_assertion(f_2==face(cpp11::get<1>(res),tm2));
Node_id node_id=++current_node;
// 计算交点并添加到nodes中
add_new_node(h_1,f_2,tm1,tm2,vpm1,vpm2,res);
visitor.new_node_added(node_id,ON_FACE,h_1,halfedge(f_2,tm2),tm1,tm2,CGAL::cpp11::get<3>(res),CGAL::cpp11::get<2>(res));
// 建立点的id和相关的所有面的关系,f_to_node,
// std::map< Face_pair_and_int, Node_id_set > f_to_node
for (;it_edge!=all_edges.end();++it_edge){
add_intersection_point_to_face_and_all_edge_incident_faces(f_2,*it_edge,tm2,tm1,node_id);
//erase face from the list to test intersection with it_edge
if ( it_edge==all_edges.begin() )
fset.erase(fset.begin());
else
{
typename Edge_to_faces::iterator it_ets=tm1_edge_to_tm2_faces.find(edge(*it_edge,tm1));
if(it_ets!=tm1_edge_to_tm2_faces.end()) it_ets->second.erase(f_2);
}
}
} // end case ON_FACE
break;
// Case when the edge intersect one edge of the face.
// 处理交点在边上的情况
case ON_EDGE:
{
Node_id node_id=++current_node;
add_new_node(h_1,f_2,tm1,tm2,vpm1,vpm2,res);
halfedge_descriptor h_2=cpp11::get<1>(res);
visitor.new_node_added(node_id,ON_EDGE,h_1,h_2,tm1,tm2,cpp11::get<3>(res),cpp11::get<2>(res));
for (;it_edge!=all_edges.end();++it_edge){
if ( it_edge!=all_edges.begin() ){
typename Edge_to_faces::iterator it_ets=tm1_edge_to_tm2_faces.find(edge(*it_edge,tm1));
Face_set* fset_bis = (it_ets!=tm1_edge_to_tm2_faces.end())?&(it_ets->second):NULL;
cip_handle_case_edge(node_id,fset_bis,*it_edge,h_2,tm1,tm2);
}
else
cip_handle_case_edge(node_id,&fset,*it_edge,h_2,tm1,tm2);
}
} // end case ON_EDGE
break;
case ON_VERTEX:
{
Node_id node_id=++current_node;
halfedge_descriptor h_2=cpp11::get<1>(res);
nodes.add_new_node(get(vpm2, target(h_2,tm2))); //we use the original vertex to create the node
//before it was ON_FACE but do not remember why, probably a bug...
visitor.new_node_added(node_id,ON_VERTEX,h_1,h_2,tm1,tm2,cpp11::get<3>(res),cpp11::get<2>(res));
for (;it_edge!=all_edges.end();++it_edge){
if ( it_edge!=all_edges.begin() ){
typename Edge_to_faces::iterator it_ets=tm1_edge_to_tm2_faces.find(edge(*it_edge,tm1));
Face_set* fset_bis = (it_ets!=tm1_edge_to_tm2_faces.end())?&(it_ets->second):NULL;
cip_handle_case_vertex(node_id,fset_bis,*it_edge,h_2,tm1,tm2);
}
else
cip_handle_case_vertex(node_id,&fset,*it_edge,h_2,tm1,tm2);
}
} // end case ON_VERTEX
break;
} // end switch on the type of the intersection
} // end loop on all faces that intersect the edge
} // end loop on all entries (edges) in 'edge_to_face'
CGAL_assertion(nodes.size()==unsigned(current_node+1));
}
这一步执行完之后,nodes里面会存有所有的交点,f_to_node会存有所有face_pair和交点的关系。
construct_polylines
得到所有的交点,以及face_pair和交点之间的关系之后,需要构建线段,如下:
template <class Output_iterator>
void construct_polylines(Output_iterator out){
typedef typename boost::property_traits<VertexPointMap>::value_type Point_3;
std::size_t nb_nodes=nodes.size();
std::vector<Graph_node> graph(nb_nodes);
//counts the number of time each node has been seen
bool isolated_point_seen=false;
// 将所有的顶点构建成一个graph
for (typename Faces_to_nodes_map::iterator it=f_to_node.begin();it!=f_to_node.end();++it){
const Node_id_set& segment=it->second;
CGAL_assertion(segment.size()==2 || segment.size()==1);
if (segment.size()==2){
Node_id i=segment.first;
Node_id j=segment.second;
graph[i].insert(j);
graph[j].insert(i);
}
else{
CGAL_assertion(segment.size()==1);
isolated_point_seen=true;
}
}
// ...
// 如果带有孤立点则进行如下处理
//handle polylines
while(terminal_nodes.any())
{
std::size_t i=terminal_nodes.find_first();
Graph_node& node_i = graph[i];
std::vector<Point_3> polyline;
std::size_t j=node_i.top();
visitor.start_new_polyline(i,j);
CGAL_assertion(i!=j);
node_i.pop();
if (node_i.empty())
terminal_nodes.reset(i);
polyline.push_back(nodes[i]);
while(true){
Graph_node& node_j=graph[j];
CGAL_assertion(!node_j.empty());
node_j.erase(i);
i=j;
polyline.push_back(nodes[i]);
if (node_j.is_terminal())
{
if (node_j.empty())
terminal_nodes.reset(j);
break;
}
else{
j=node_j.top();
visitor.add_node_to_polyline(j);
node_j.pop();
CGAL_assertion(node_j.empty());
interior_nodes.reset(i);
}
}
*out++=polyline;
}
// 根据graph构建polyline
//handle cycles
while(interior_nodes.any())
{
std::size_t i=interior_nodes.find_first();
Graph_node& node_i=graph[i];
std::vector<Point_3> polyline;
Node_id j=node_i.top();
visitor.start_new_polyline(i,j);
interior_nodes.reset(i);
polyline.push_back(nodes[i]);
Node_id first=i;
do{
Graph_node& node_j=graph[j];
interior_nodes.reset(j);
node_j.erase(i);
i=j;
polyline.push_back(nodes[i]);
j=node_j.top();
visitor.add_node_to_polyline(j);
}while(j!=first);
polyline.push_back(nodes[j]);// we duplicate first point for cycles
*out++=polyline;
}
}
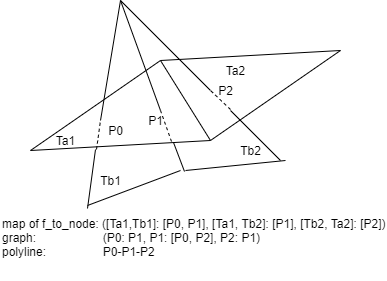
下面给出一个示意图用来辅助理解construct_polylines。
Example For Debug
为了更好的对代码加深理解,下面给出简化的调试示例。
// t1.off
OFF
4 2 0
0 0 0
1 0 0
1 1 0
0 1 0
3 0 1 2
3 0 2 3
// t2.off
OFF
4 2 0
0.1 0.9 -1
0.1 0.9 1
0.9 0.1 -1
0.9 0.1 1
3 0 1 3
3 0 3 2
示例代码:
#include <CGAL/Exact_predicates_inexact_constructions_kernel.h>
#include <CGAL/Polygon_mesh_processing/corefinement.h>
#include <CGAL/Surface_mesh.h>
typedef CGAL::Exact_predicates_inexact_constructions_kernel Kernel;
typedef CGAL::Surface_mesh<Kernel::Point_3> Mesh;
typedef CGAL::property_map_selector<Mesh, CGAL::vertex_point_t>::type Vpm;
namespace PMP = CGAL::Polygon_mesh_processing;
void read_mesh(Mesh& mesh, std::string filename)
{
std::ifstream input(filename);
if (!input || !(input >> mesh) || !CGAL::is_triangle_mesh(mesh)) {
std::cerr << "Not a valid input file" << std::endl;
return;
}
}
void test_intersection()
{
Mesh tm1, tm2;
read_mesh(tm1, "t1.off");
read_mesh(tm2, "t2.off");
Vpm vpm1 = get_property_map(boost::vertex_point, tm1);
Vpm vpm2 = get_property_map(boost::vertex_point, tm2);
PMP::Corefinement::Intersection_of_triangle_meshes<Mesh, Vpm> functor(tm1, tm2, vpm1, vpm2);
functor(CGAL::Emptyset_iterator(), false, true);
}
int main()
{
test_intersection();
return 0;
}
作者: grassofsky
出处: http://www.cnblogs.com/grass-and-moon
本文版权归作者,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出, 原文链接 如有问题, 可邮件(grass-of-sky@163.com)咨询.
