

首先按照yolov8的环境部署
https://www.cnblogs.com/gooutlook/p/18511319
教程
https://docs.ultralytics.com/zh/guides/raspberry-pi/#convert-model-to-ncnn-and-run-inference
1更新软件包列表,安装 pip 并升级到最新版本 sudo apt update sudo apt install python3-pip -y pip install -U pip 2安装 ultralytics pip 软件包与可选依赖项 pip install ultralytics[export] 3重启设备 sudo reboot
在 Raspberry Pi 上使用NCNN
在Ultralytics.NET 支持的所有模型导出格式中,.NET 是最受欢迎的、 NCNN由于NCNN 针对移动/嵌入式平台(如 ARM 架构)进行了高度优化,因此在使用 Raspberry Pi 设备时可提供最佳推理性能。
将模型转换为NCNN 并运行推理
PyTorch 格式的 YOLO11n 模型被转换为NCNN ,以便使用导出的模型进行推理。
from ultralytics import YOLO
# Load a YOLO11n PyTorch model
model = YOLO("yolo11n.pt")
# Export the model to NCNN format
model.export(format="ncnn") # creates 'yolo11n_ncnn_model'
# Load the exported NCNN model
ncnn_model = YOLO("yolo11n_ncnn_model")
# Run inference
results = ncnn_model("https://ultralytics.com/images/bus.jpg")
Ultralytics 基准
from ultralytics import YOLO
# Load a YOLO11n PyTorch model
model = YOLO("yolo11n.pt")
# Benchmark YOLO11n speed and accuracy on the COCO8 dataset for all all export formats
results = model.benchmark(data="coco8.yaml", imgsz=640)
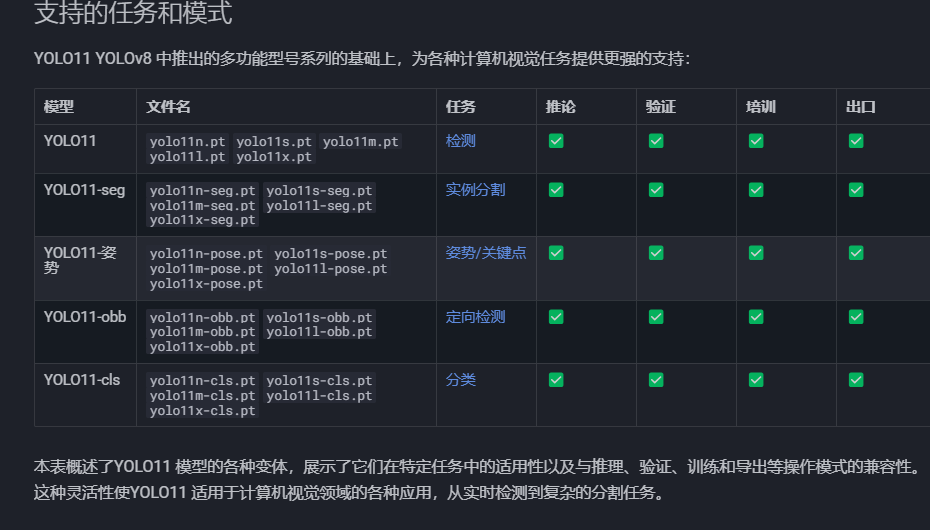
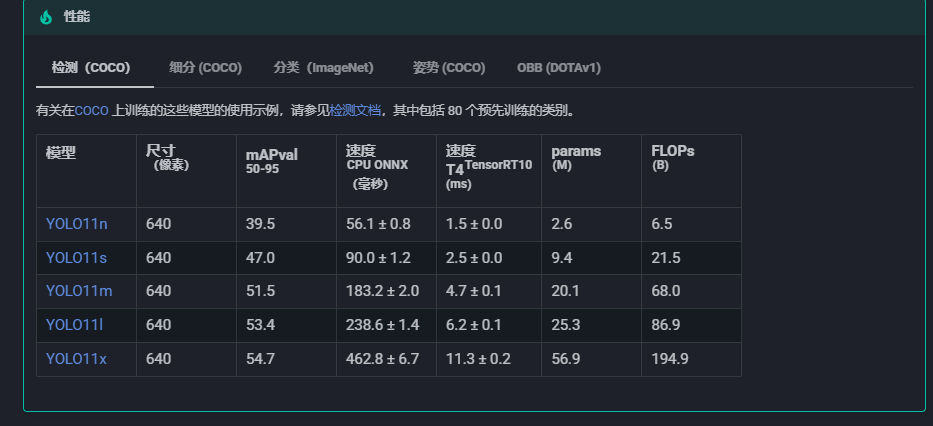
下载测试模型
https://docs.ultralytics.com/zh/models/yolo11/#overview
https://huggingface.co/Ultralytics/YOLO11/blob/365ed86341e7a7456dbc4cafc09f138814ce9ff1/yolo11n.pt
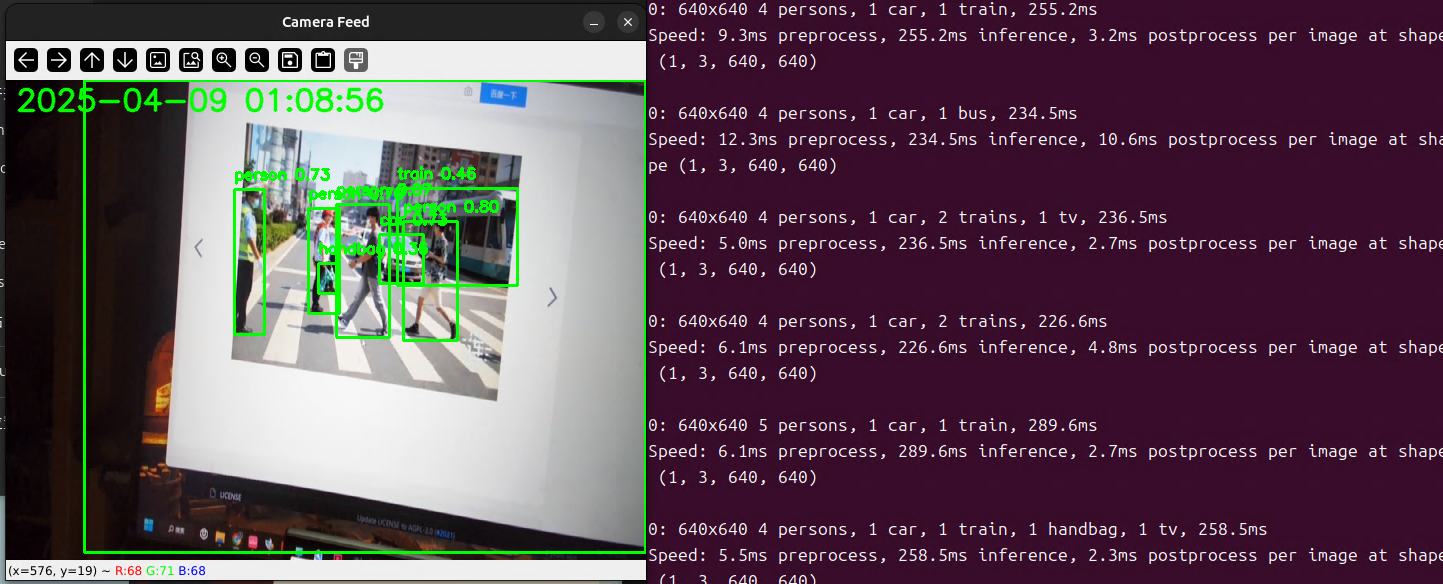
多线程测试代码
import cv2
import threading
import numpy as np
from ultralytics import YOLO
import datetime
use_ncnn = 1
# 加载YOLOv8模型
model = YOLO('./yolo11n.pt')
# Export the model to NCNN format
model.export(format="ncnn") # creates 'yolo11n_ncnn_model'
# Load the exported NCNN model
ncnn_model = YOLO("yolo11n_ncnn_model")
# 共享内存类
class SharedMemory:
def __init__(self):
self.frame = None
self.lock = threading.Lock()
self.running = True # 添加运行状态标志
# 从 USB 相机读取图像的线程
def capture_thread(shared_memory):
cap = cv2.VideoCapture(0)
if not cap.isOpened():
print("无法打开相机")
return
while shared_memory.running:
ret, frame = cap.read()
if not ret:
print("无法读取图像")
break
# 将图像存储到共享内存
with shared_memory.lock:
shared_memory.frame = frame.copy()
cap.release()
# 从共享内存读取图像并展示的线程
def display_thread(shared_memory):
while shared_memory.running:
with shared_memory.lock:
if shared_memory.frame is not None:
global results
if use_ncnn==1:
results = ncnn_model(shared_memory.frame)
else:
# 使用YOLOv8进行检测
results = model(shared_memory.frame)
frame = shared_memory.frame
# 解析结果并绘制检测框
for result in results:
boxes = result.boxes
for box in boxes:
x1, y1, x2, y2 = map(int, box.xyxy[0]) # 获取检测框坐标
confidence = box.conf[0] # 获取置信度
cls = int(box.cls[0]) # 获取类别
label = model.names[cls] # 获取类别名称
# 绘制检测框和标签
cv2.rectangle(frame, (x1, y1), (x2, y2), (0, 255, 0), 2)
cv2.putText(frame, f"{label} {confidence:.2f}", (x1, y1 - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
# 获取当前时间
now = datetime.datetime.now()
time_str = now.strftime("%Y-%m-%d %H:%M:%S")
cv2.putText(frame, time_str, (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2, cv2.LINE_AA)
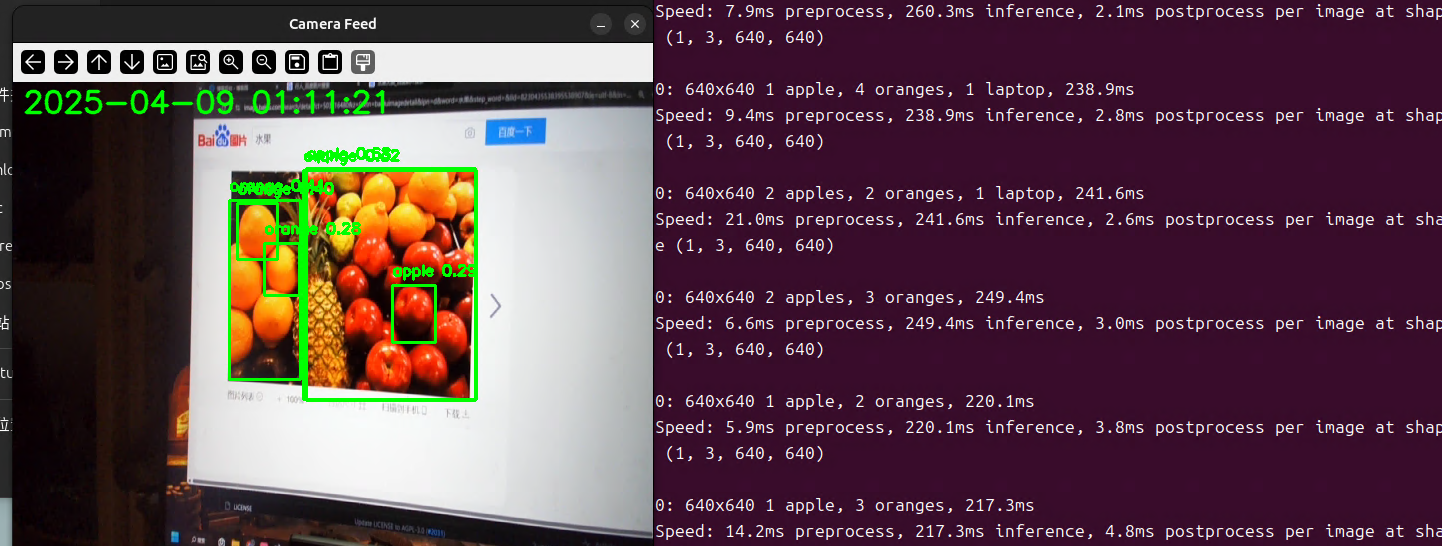
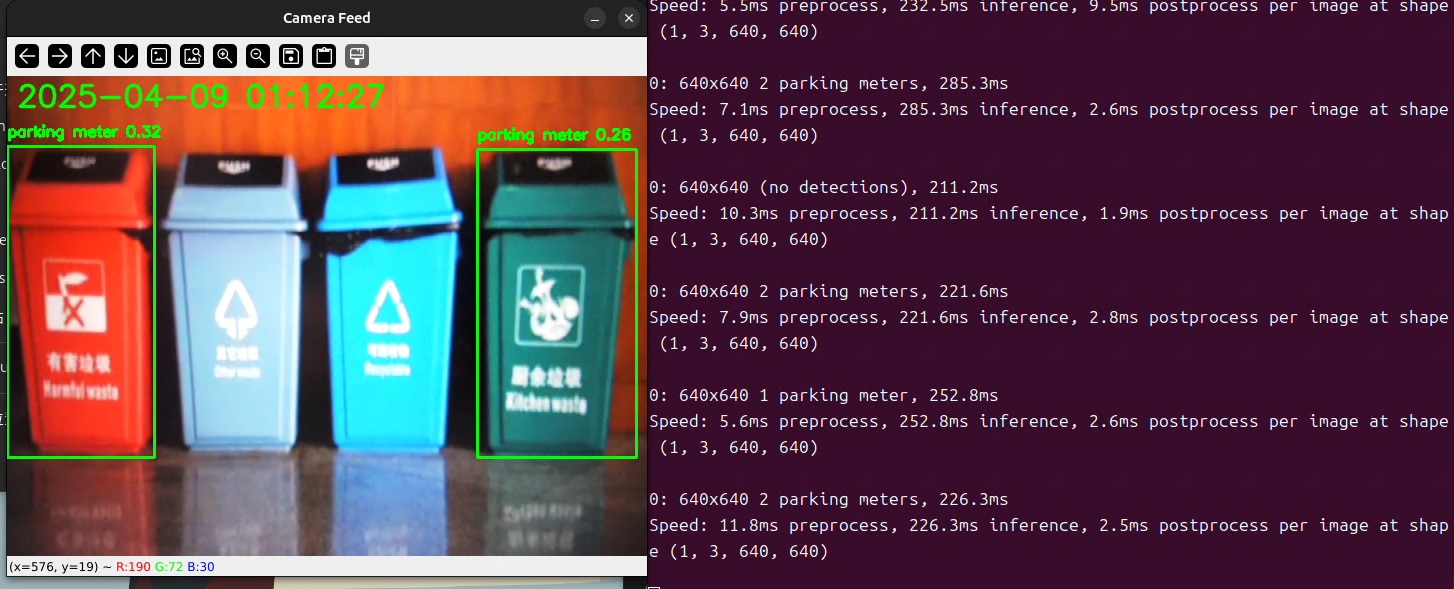
cv2.imshow('Camera Feed', frame)
# 检查按键是否为 'q'
if cv2.waitKey(1) & 0xFF == ord('q'):
shared_memory.running = False # 设置运行状态为 False
break
cv2.destroyAllWindows()
# 主函数
if __name__ == "__main__":
shared_memory = SharedMemory()
# 启动捕获线程
capture_thread = threading.Thread(target=capture_thread, args=(shared_memory,))
capture_thread.start()
# 启动显示线程
display_thread = threading.Thread(target=display_thread, args=(shared_memory,))
display_thread.start()
capture_thread.join()
display_thread.join()

 浙公网安备 33010602011771号
浙公网安备 33010602011771号