

https://blog.csdn.net/plejahhshsh/article/details/126002268
1 确保ros cvbriage使用的版本和openvslam 以及dow2库使用的 opencv一样
(ros 直接装的指令 默认怎装了opencv4.2 导致和自己编译的openvslam3.4.9不匹配,虽然编译通过但是后面可视化段错误)
1-1 如何修改cv_briage的opencv依赖版本
https://i.cnblogs.com/posts/edit;postId=18394497
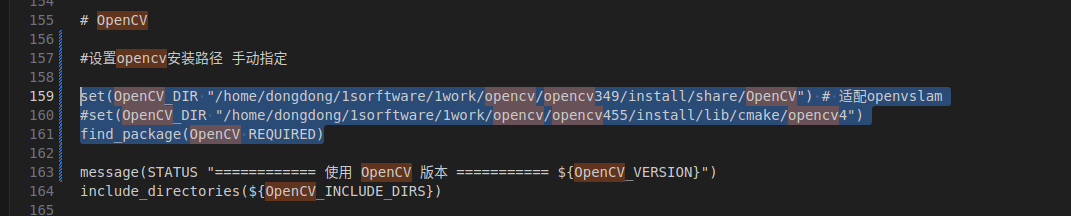
1-2 修改ros工程
opencv修改为这个这里统一使用 opencv3.4.9
2 编译带指令

编译
1 2 3 4 5 6 7 8 9 | #ros版本编译指令cd /home/dongdong/2project/1salm/GNSS_openvslam/roscatkin_make \-DBUILD_WITH_MARCH_NATIVE=ON \-DUSE_PANGOLIN_VIEWER=ON \-DUSE_SOCKET_PUBLISHER=OFF \-DUSE_STACK_TRACE_LOGGER=ON \-DBOW_FRAMEWORK=DBoW2 \-DBUILD_TESTS=OFF |
2 指令运行
首先
roscore
然后

1 | source devel/setup.bash |
定位节点
1 2 3 4 5 | rosrun openvslam run_localization \-v /home/dongdong/2project/0data/NWPU/FHY_config/orb_vocab.dbow2 \-i /home/dongdong/2project/0data/NWPU/images \-c /home/dongdong/2project/0data/NWPU/FHY_config/GNSS_config.yaml \--map-db /home/dongdong/2project/0data/NWPU/Map_GNSS.msg |

编写脚本执行 参考
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 | #!/bin/bash#外部给与执行权限#sudo chmod +x run_ros_nodes.sh# conda activate gaussian_splattingWORKSPACE_DIR="/home/dongdong/2project/1salm/GNSS_openvslam/ros" # 修改1-1 自己创建的ros节点工程catkin_make根目录python_DIR="/home/dongdong/2project/1salm/GNSS_openvslam/ros/src/image_gaosi/src" # 修改1-2 自己创建的python脚本位置config_DIR="/home/dongdong/2project/0data/NWPU/FHY_config/GNSS_config.yaml" # 修改1-3 数据集conda_envs="/home/dongdong/1sorftware/1work/yes" # 修改2-1 自己的conda 安装路径ROS_cv_briage_dir = "/home/dongdong/1sorftware/1work/opencv/catkin_ws_cv_bridge/devel/setup.bash" # 修改2-2 自己编译的cv_briage包节点,貌似不用也行 制定了依赖opencv3.4.9 而非自带4.2echo $ROS_cv_briage_dirconda_envs_int=$conda_envs"/etc/profile.d/conda.sh" # 不用改 conda自带初始化文件echo $conda_envs_intconda_envs_bin=$conda_envs"/envs/gaussian_splatting/bin" # 不用改 conda自带python安装位置 脚本中需要指定是conda特定的环境python而不是系统默认的echo $conda_envs_binROS_SETUP="/opt/ros/noetic/setup.bash" #不用改 安装时候添加到系统路径了 不需要每次都source 这里留着#指定目录# 启动 ROS Master 不用改echo "Starting ROS 总结点..."gnome-terminal -- bash -c "\cd $WORKSPACE_DIR; source devel/setup.bash; \ roscore; \exec bash"# 等待 ROS Master 启动sleep 3# 运行 C++ 发布节点# echo "Running C++ 发布节点..."# gnome-terminal -- bash -c "\# cd $WORKSPACE_DIR; source devel/setup.bash; \# rosrun openvslam run_slam \#-v /home/dongdong/2project/0data/NWPU/FHY_config/orb_vocab.dbow2 \#-i /home/dongdong/2project/0data/NWPU/images \#-c /home/dongdong/2project/0data/NWPU/FHY_config/GNSS_config.yaml \#--map-db /home/dongdong/2project/0data/NWPU/Map_GNSS.msg ; \# exec bash"# 运行 C++ 接收节点 echo "Running C++ 接收节点..."gnome-terminal -- bash -c "\cd $WORKSPACE_DIR; source devel/setup.bash; \source $ROS_cv_briage_dir; \rosrun openvslam run_localization \-v /home/dongdong/2project/0data/NWPU/FHY_config/orb_vocab.dbow2 \-i /home/dongdong/2project/0data/NWPU/images \-c /home/dongdong/2project/0data/NWPU/FHY_config/GNSS_config.yaml \--map-db /home/dongdong/2project/0data/NWPU/Map_GNSS.msg ; \exec bash"# 运行 python 渲染图节点# source conda_envs_int 和 source ROS_cv_briage_dir 非必要,但是考虑到脚本经常因为系统环境默认变量找不到导致的路径问题,这里还是强制给了也便于学习了解执行流程。echo "Running python 订阅节点..."echo "1 激活conda本身(脚本执行需要) 2 激活conda环境 3运行python 节点 并跟上输入参数[训练模型保存根目录,指定要使用的模型训练次数,要测试的模型精度模式]"gnome-terminal -- bash -c "\source $conda_envs_int; \ source $ROS_cv_briage_dir; \ conda activate gaussian_splatting ; \cd $python_DIR; \python3 v1_image_pose_subscriber.py \-m /home/dongdong/2project/0data/NWPU/gs_out/train1_out_sh0_num30000 \--iteration 30000 \--models baseline ;\exec bash"#$conda_envs_bin/python3 image_gps_subscriber.py \ |
其他指令参考
1 2 3 4 5 6 7 8 9 10 11 12 13 | 1)将图像更改为话题发布出去roscorerosrun image_publisher image_publisher /opt/ros/melodic/share/rviz/images/splash.png2)播放bag包,将指定的话题进行新话题名的映射rosbag play 2023-03-15-19-28-26.bag /camera/infra1/image_rect_raw:=/camera/image_raw3)显示图像的话题rosrun image_view image_view image:=/image_publisher_1603025741590002479/image_raw4)读取视频rosrun image_publisher image_publisher /xxx/1.mp45)读取摄像头数据,将参数改为摄像头设备号或者设备文件,执行以下指令:rosrun image_publisher image_publisher 0与以下指令等价:rosrun image_publisher image_publisher /dev/video0 |
1 | stella_vslam_ros是单独的代码,这里没用到 |
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 | 1)发布数据基于视频的方法rosrun image_publisher image_publisher ./aist_living_lab_1/video.mp4 /image_raw:=/camera/image_raw2)发布数据基于一般摄像头的apt install ros-${ROS_DISTRO}-usb-camrosparam set usb_cam/pixel_format yuyvrosrun usb_cam usb_cam_noderosrun image_transport republish \ raw in:=/usb_cam/image_raw raw out:=/camera/image_raw3)运行(Tracking and Mapping 源码位置:stella_vslam_ros/src/run_slam.cc)source ~/catkin_ws/devel/setup.bashrosrun stella_vslam_ros run_slam \ -v /path/to/orb_vocab.fbow \ -c /path/to/config.yaml \ --map-db-out /path/to/map.msg4)运行(Localization 源码位置:stella_vslam_ros/src/run_slam.cc)source ~/catkin_ws/devel/setup.bashrosrun stella_vslam_ros run_slam \ --disable-mapping \ -v /path/to/orb_vocab.fbow \ -c /path/to/config.yaml \ --map-db-in /path/to/map.msg |
分类:
1_1_1SLAM
, 1_1_8 openvslam



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 单元测试从入门到精通
· 上周热点回顾(3.3-3.9)
· winform 绘制太阳,地球,月球 运作规律
2020-07-31 opencv-python读取摄像头
2018-07-31 小度之家SDK功能介绍