
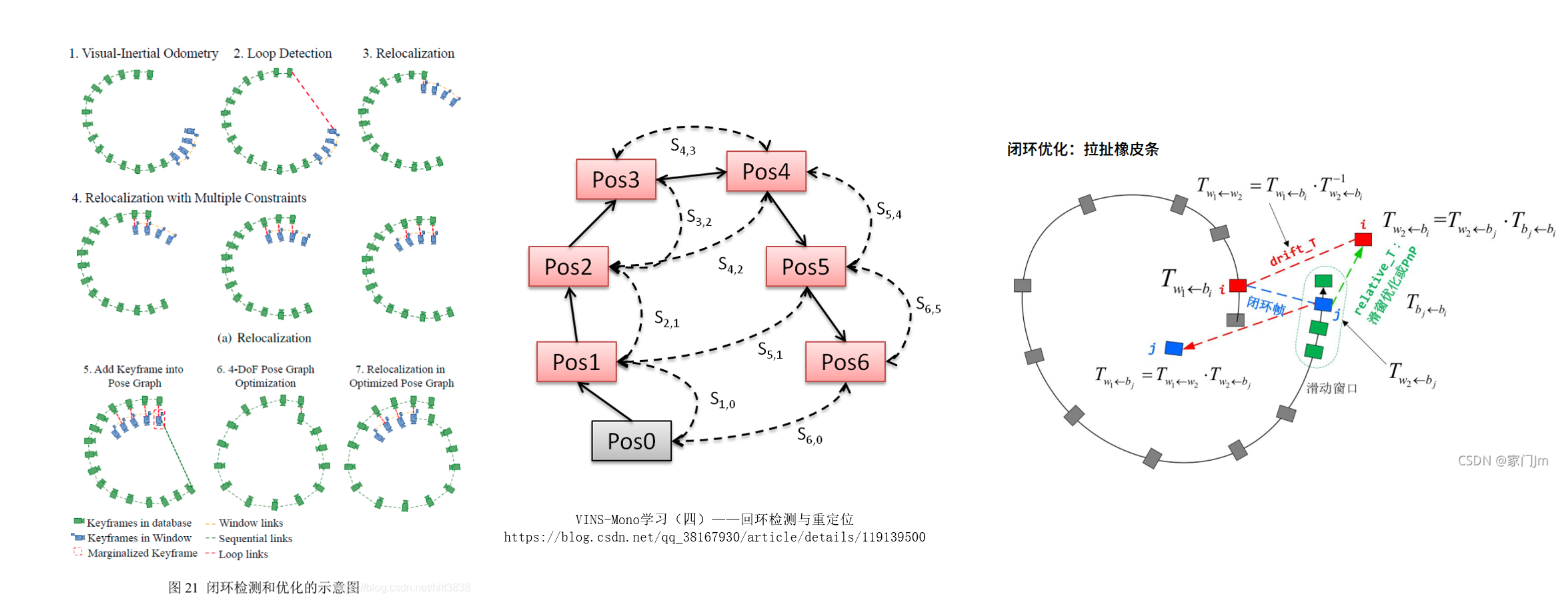
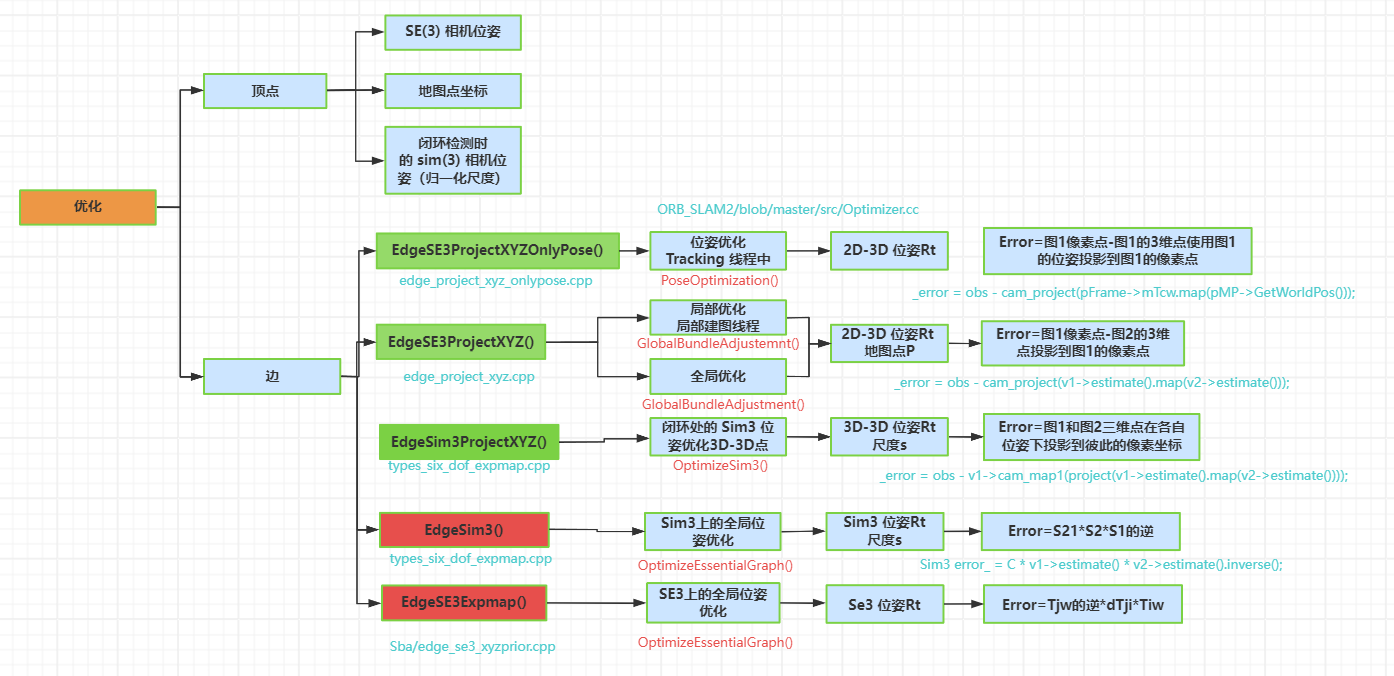
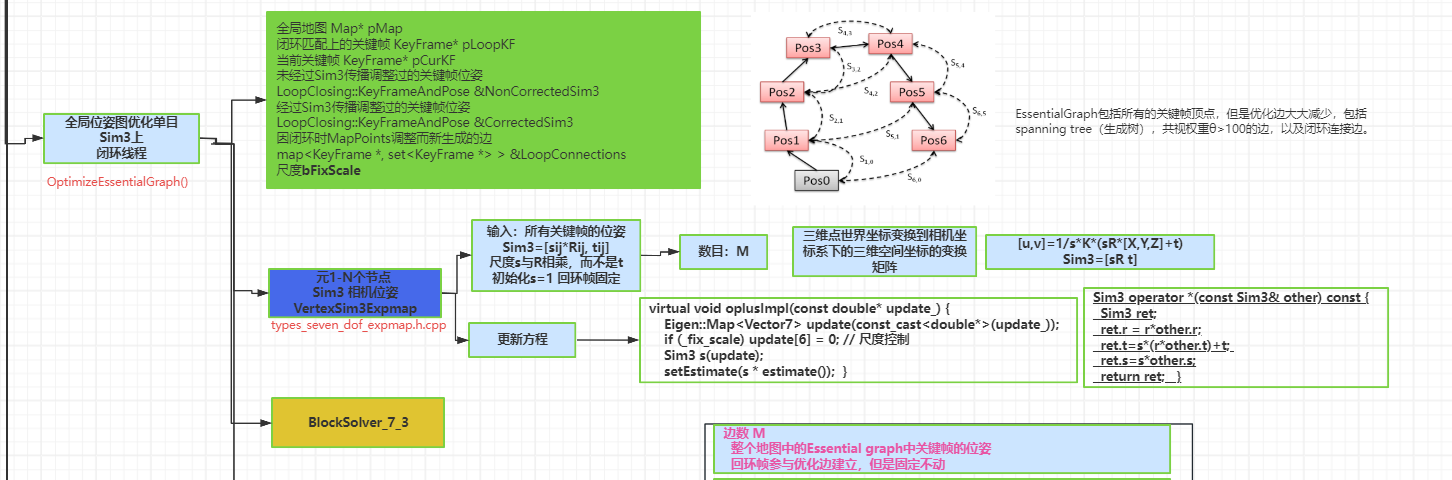
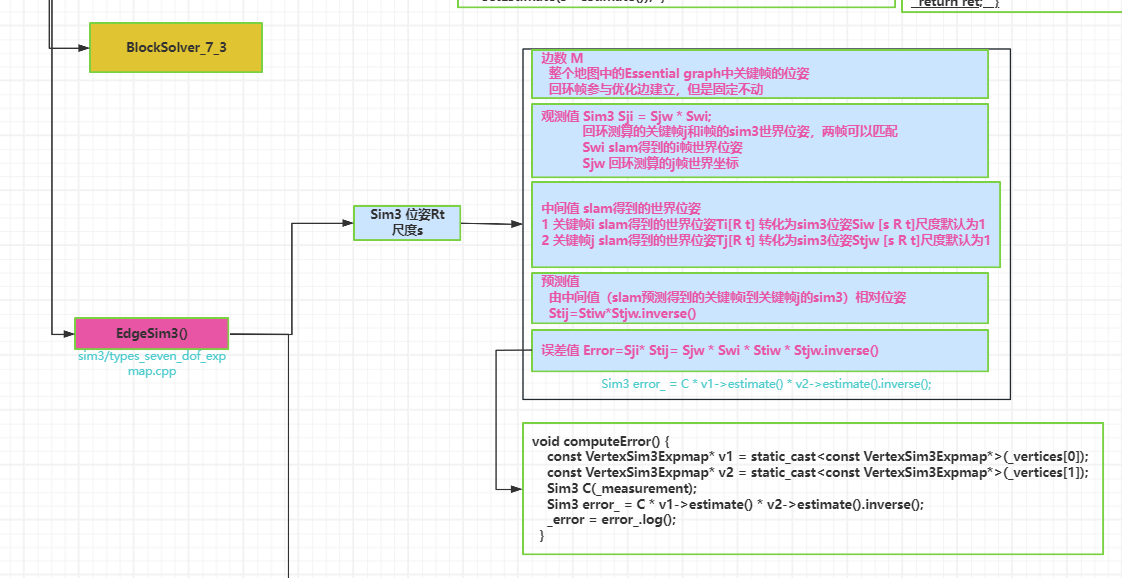
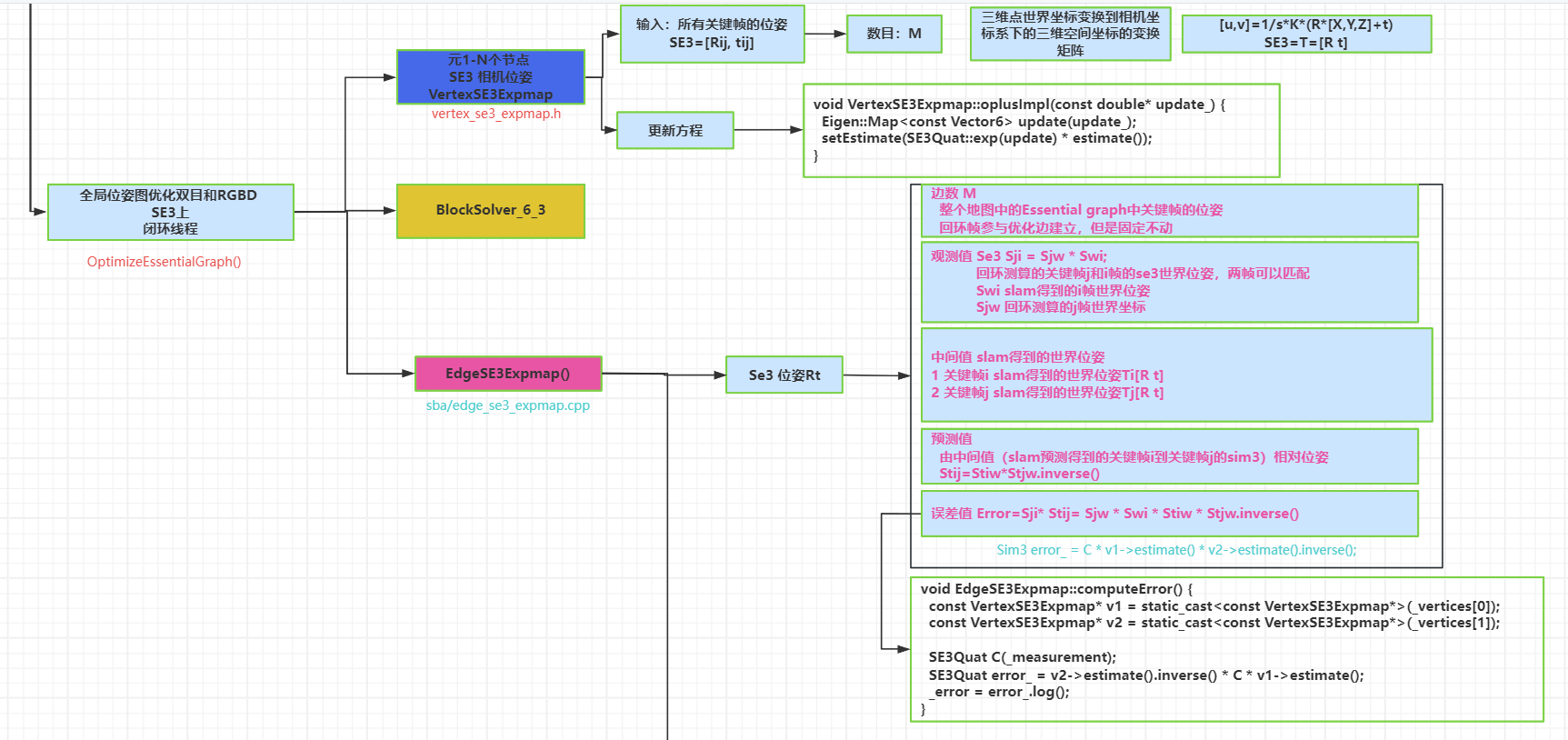
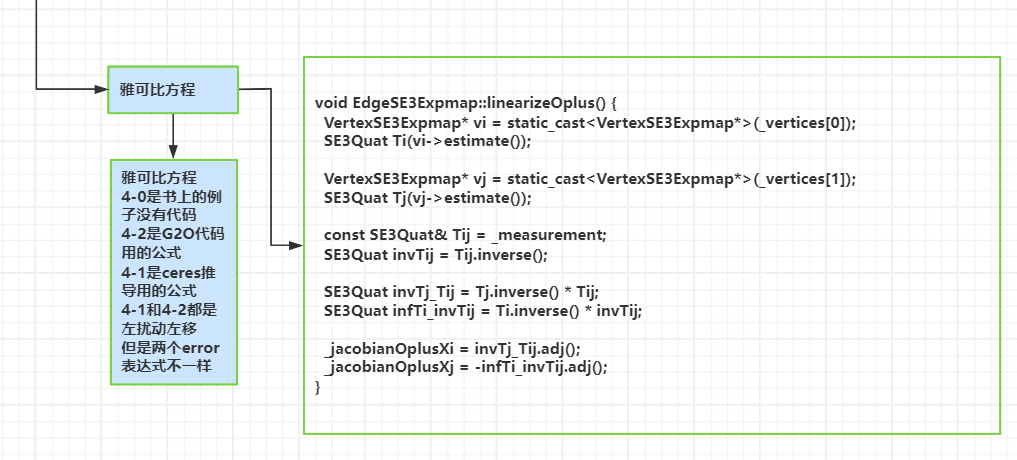
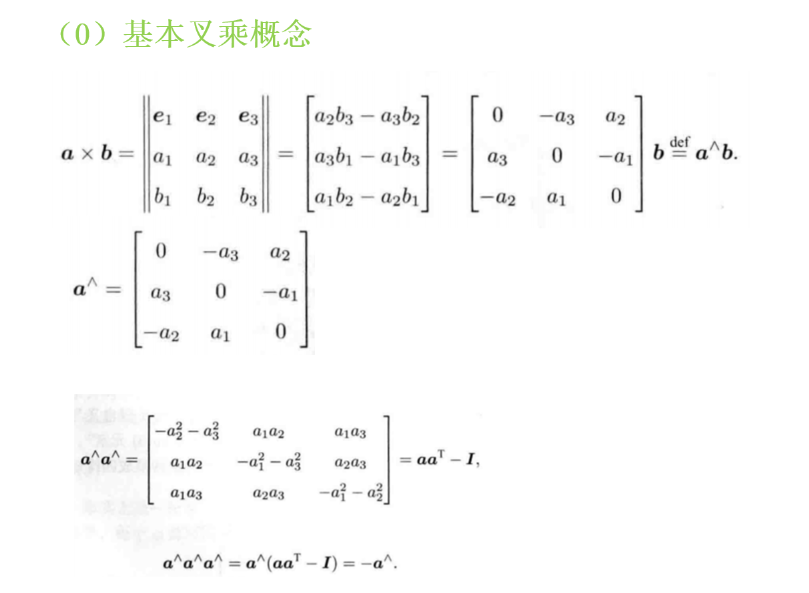
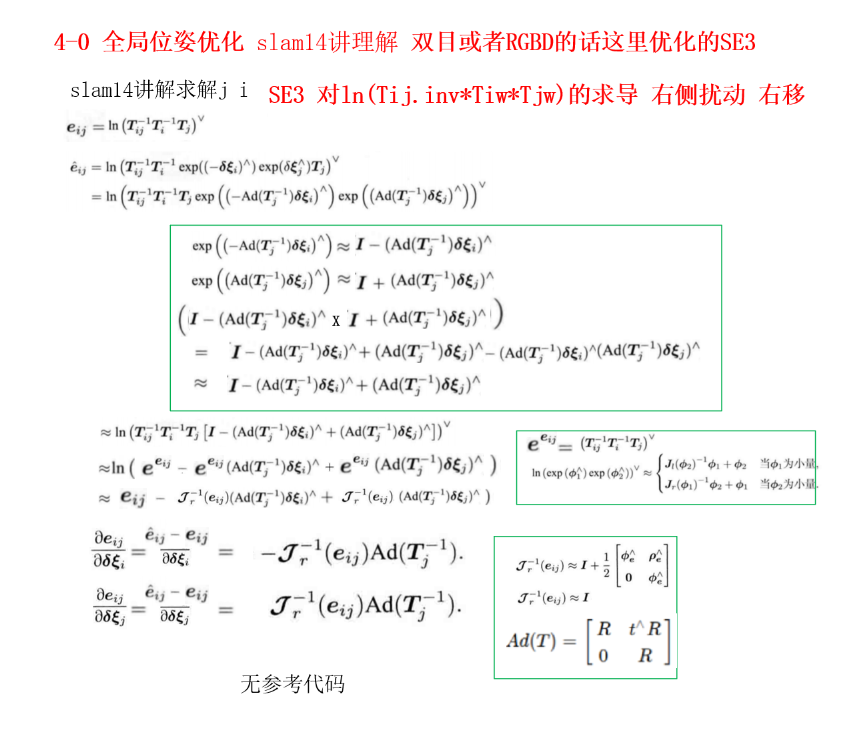
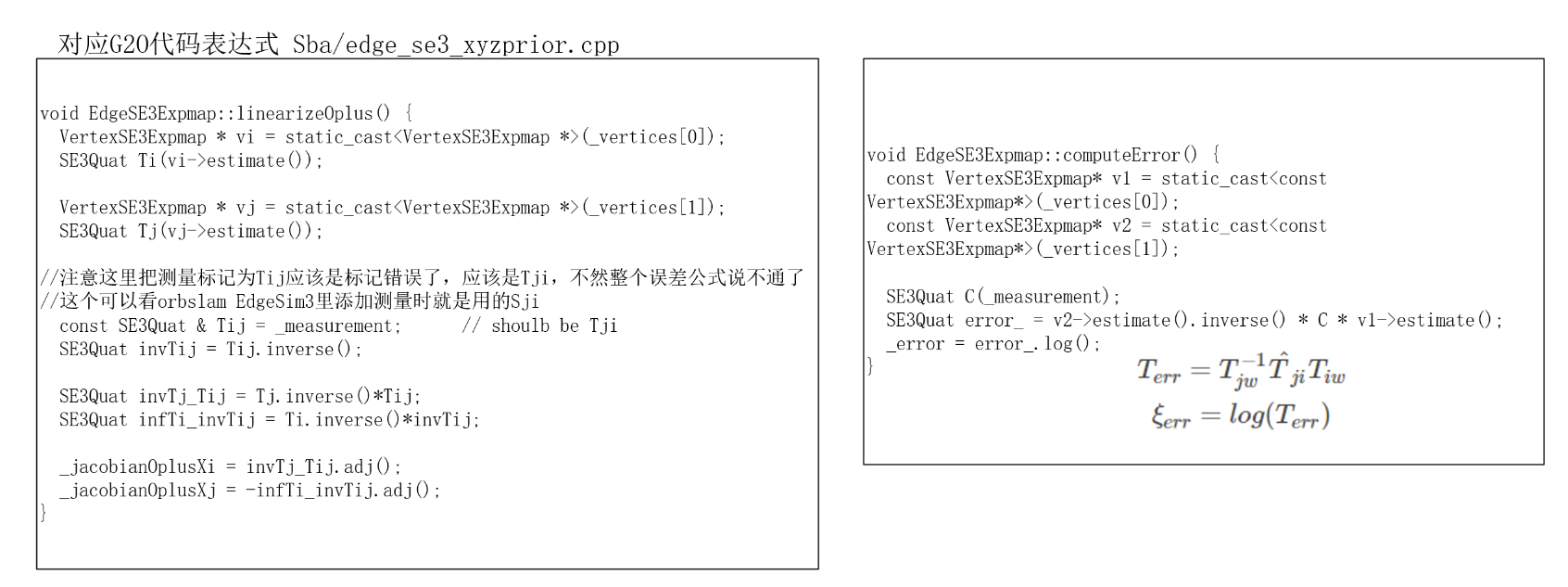
视觉VO(11-3-1)orb-slam 位姿到位姿边 --全局位姿图优化

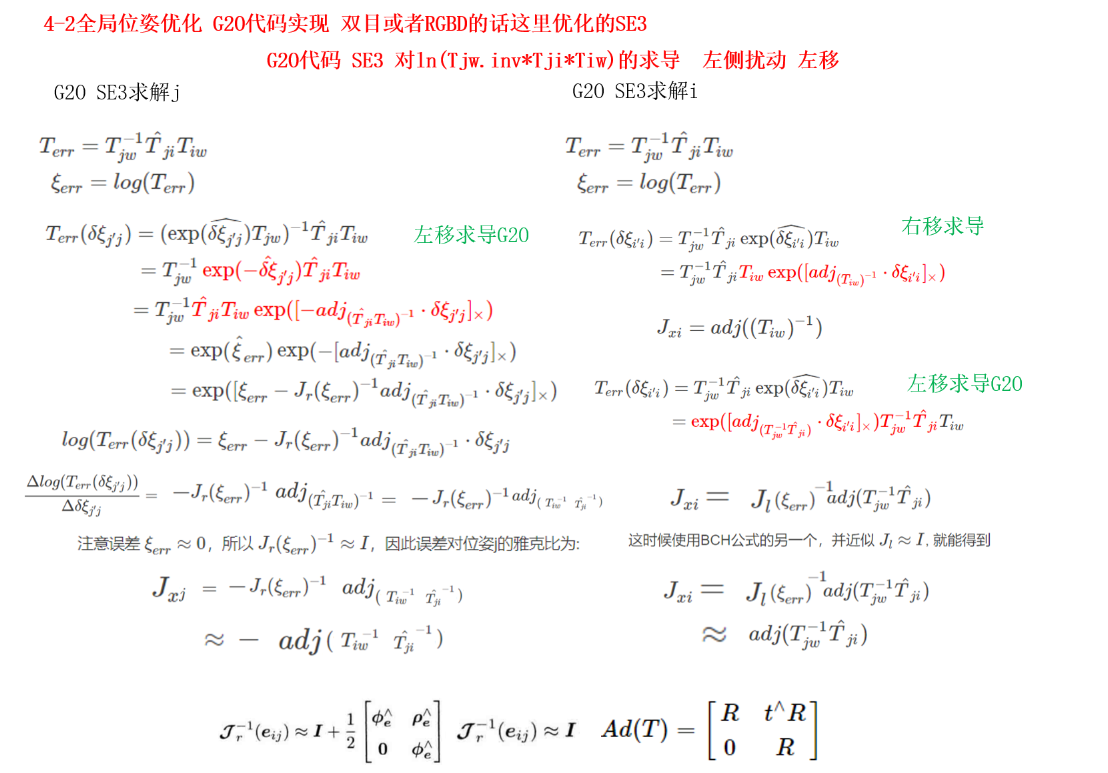
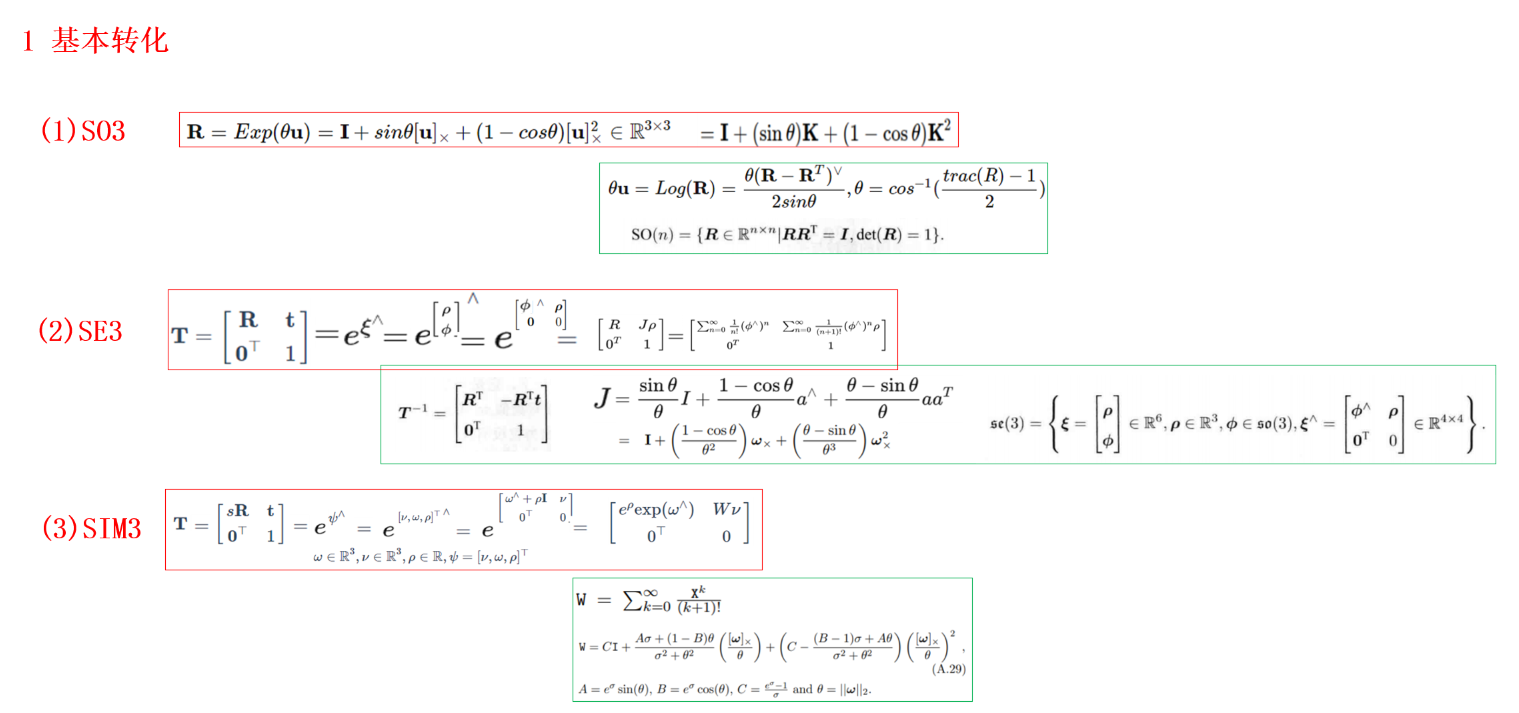
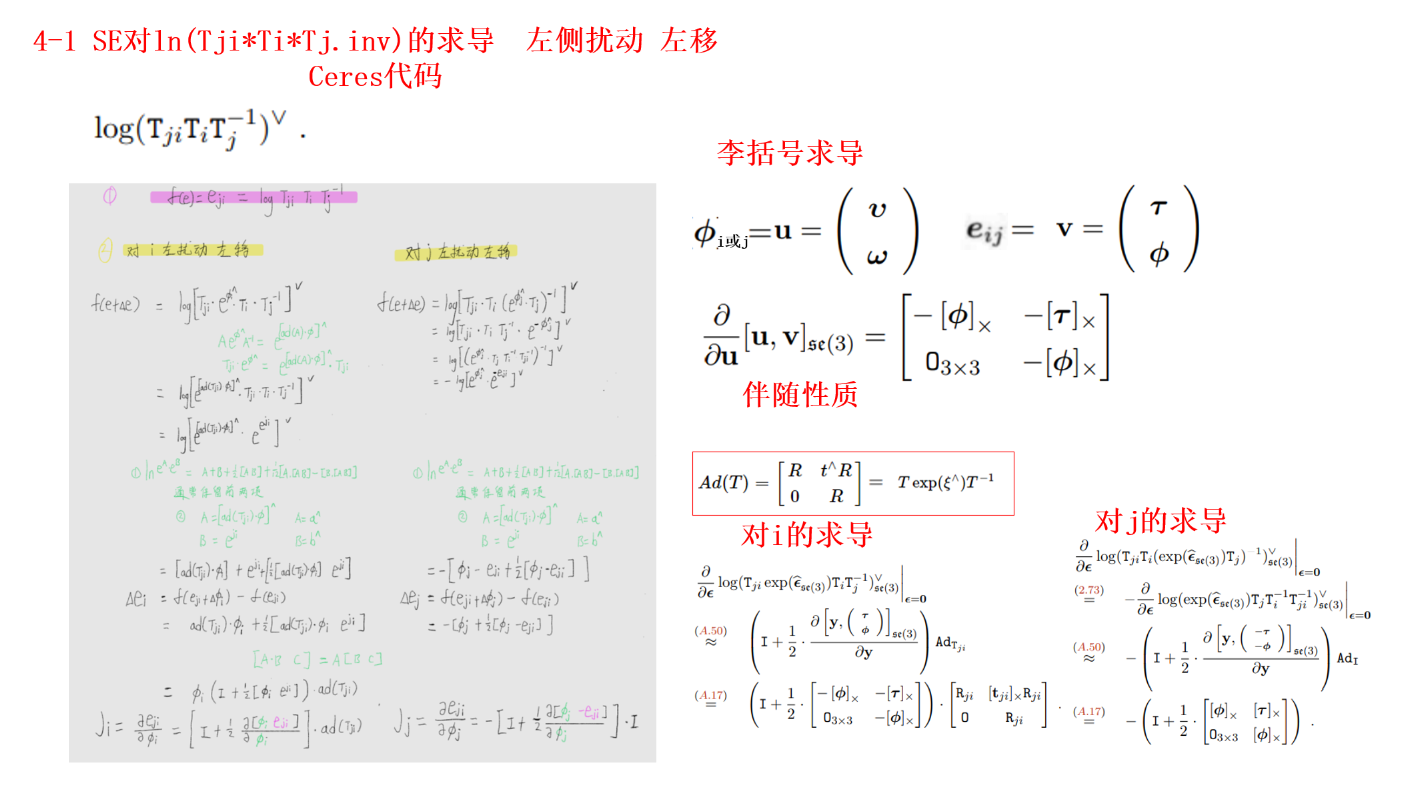
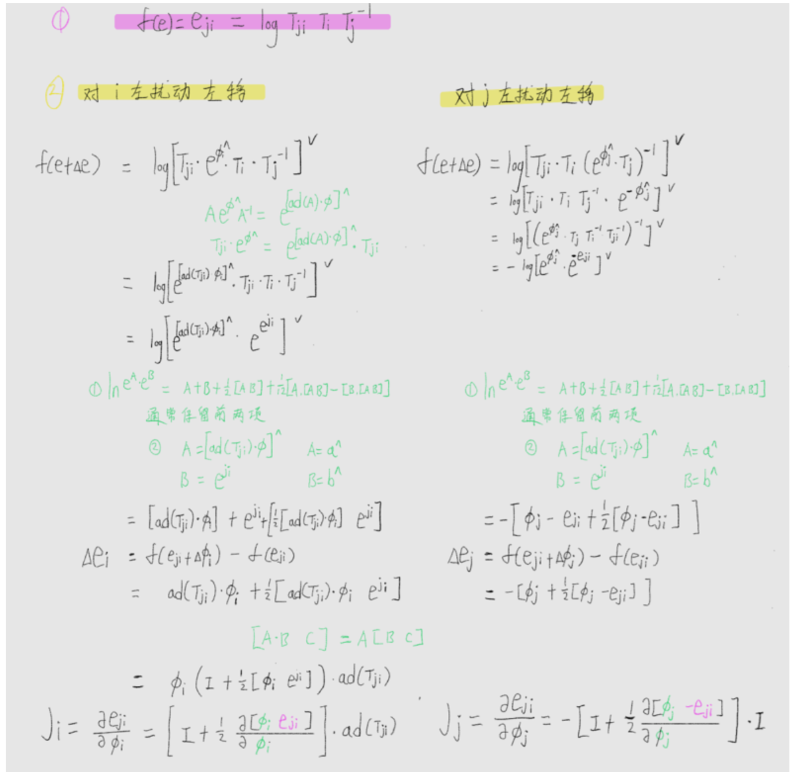
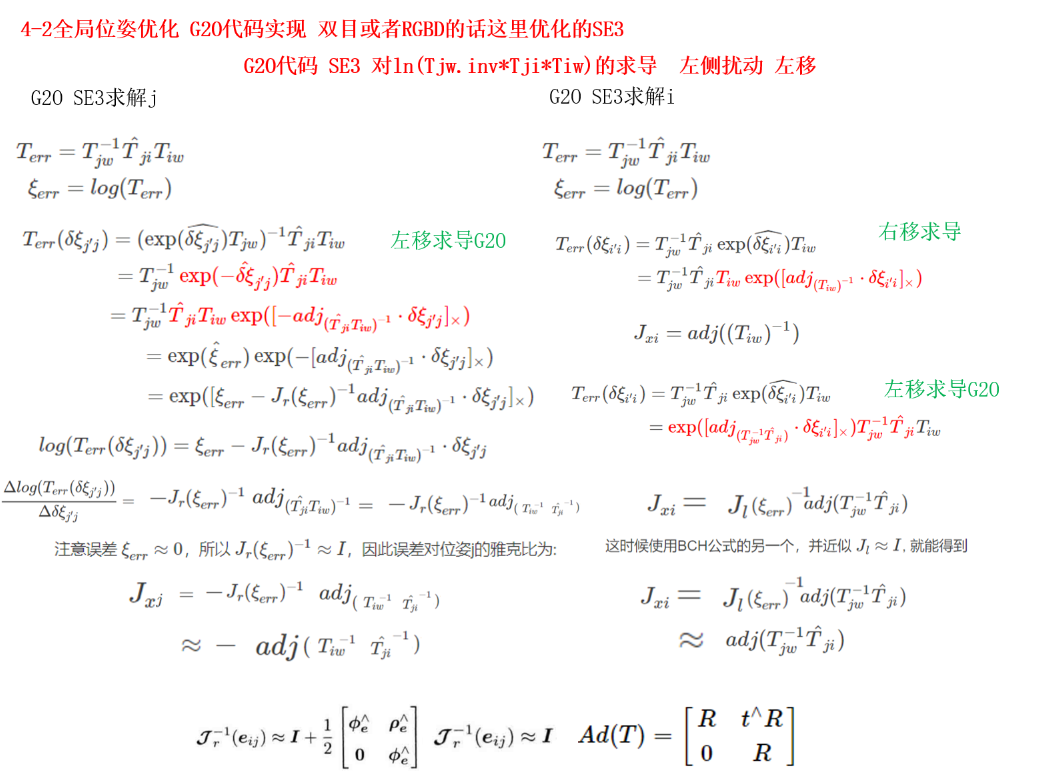
完整推导过程
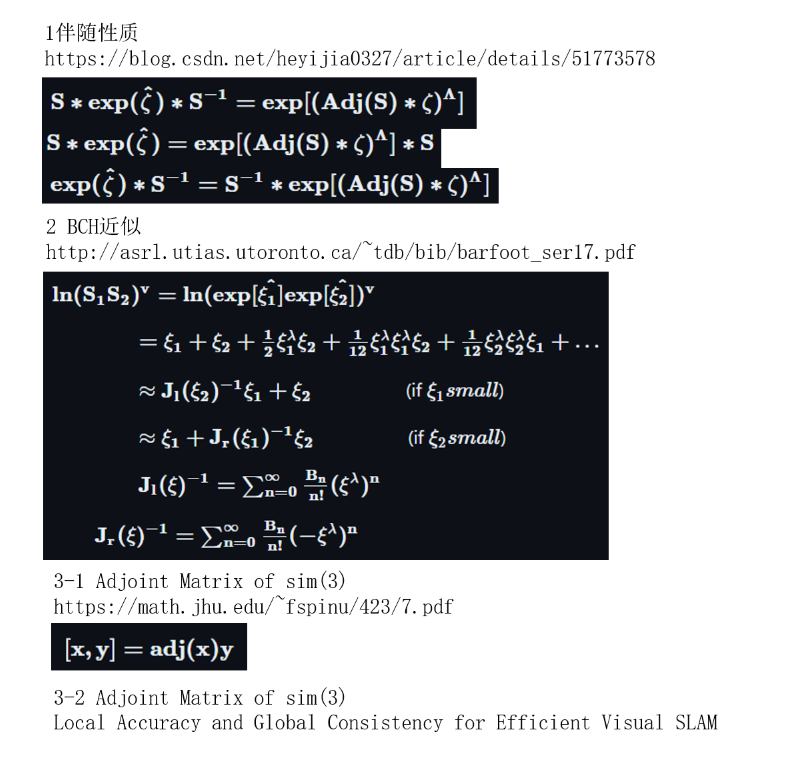
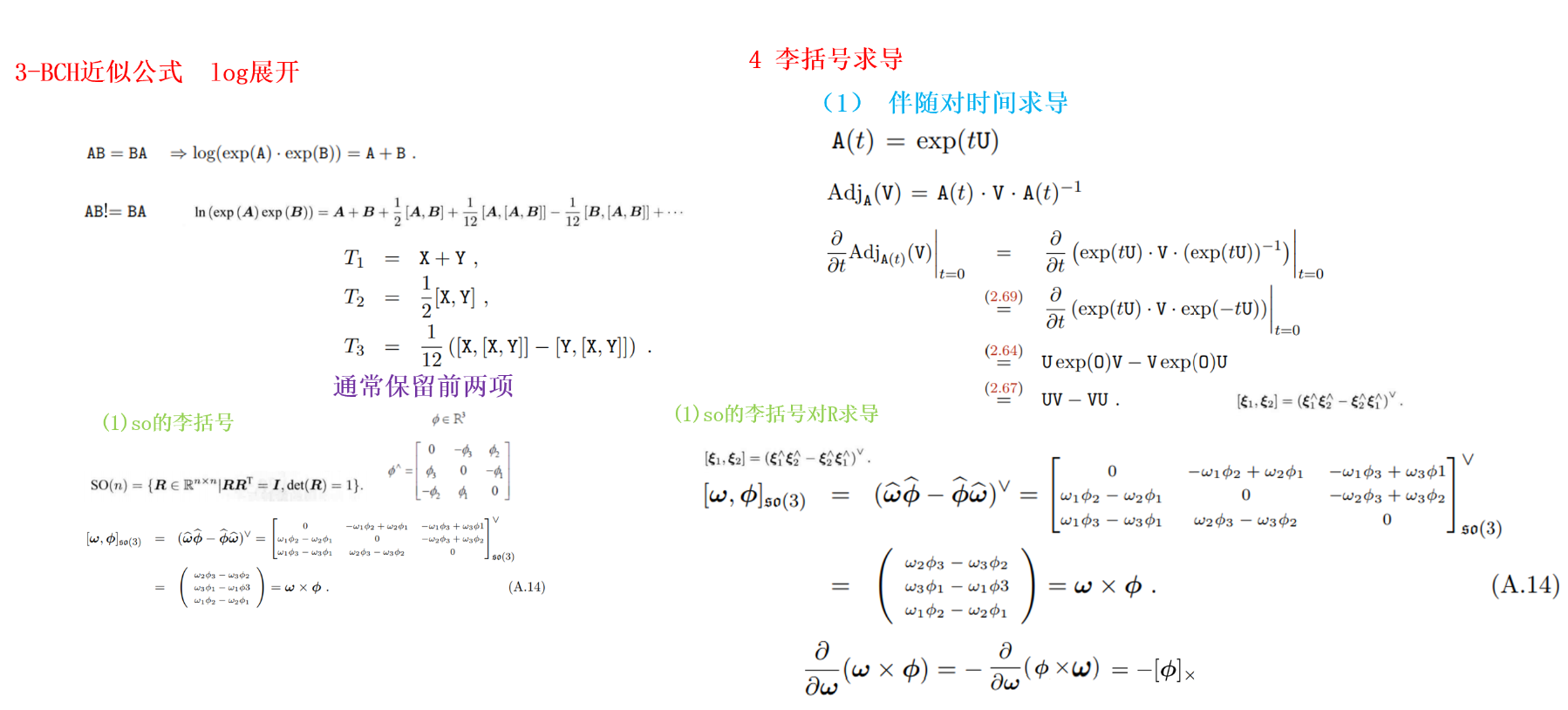
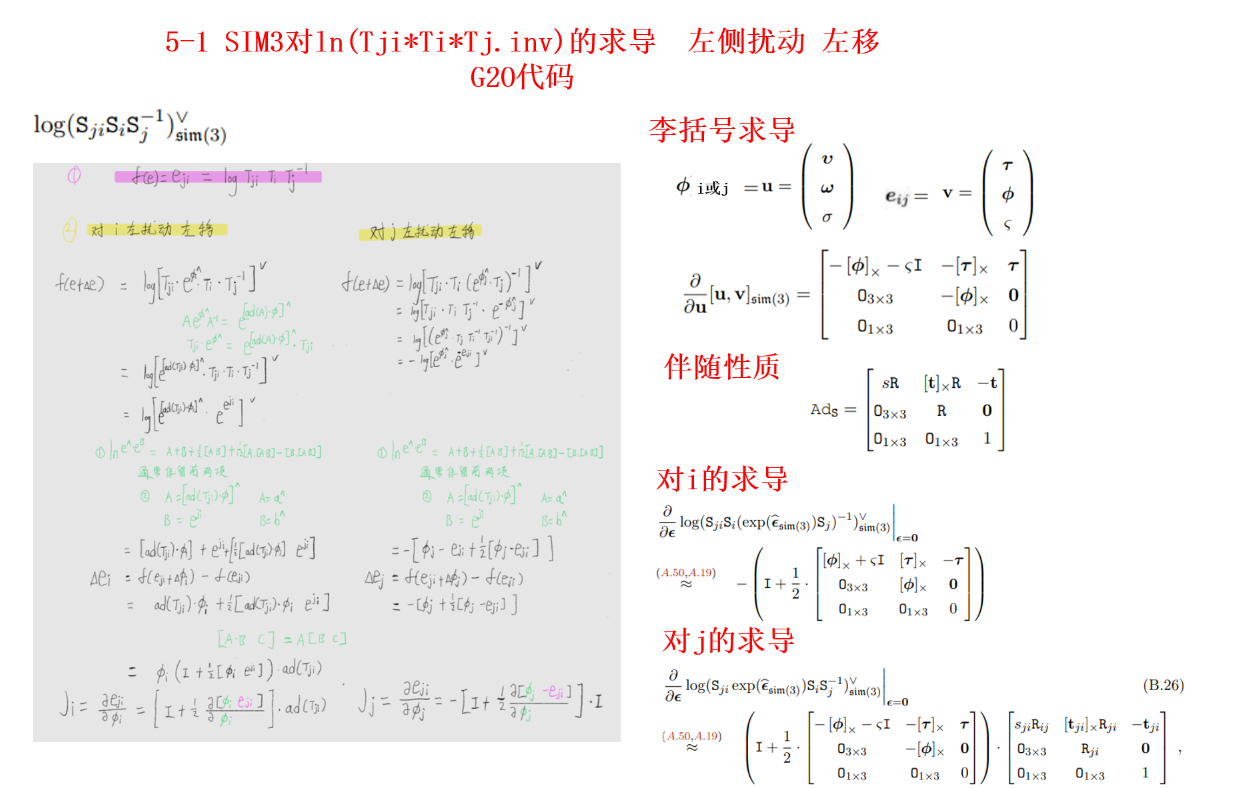
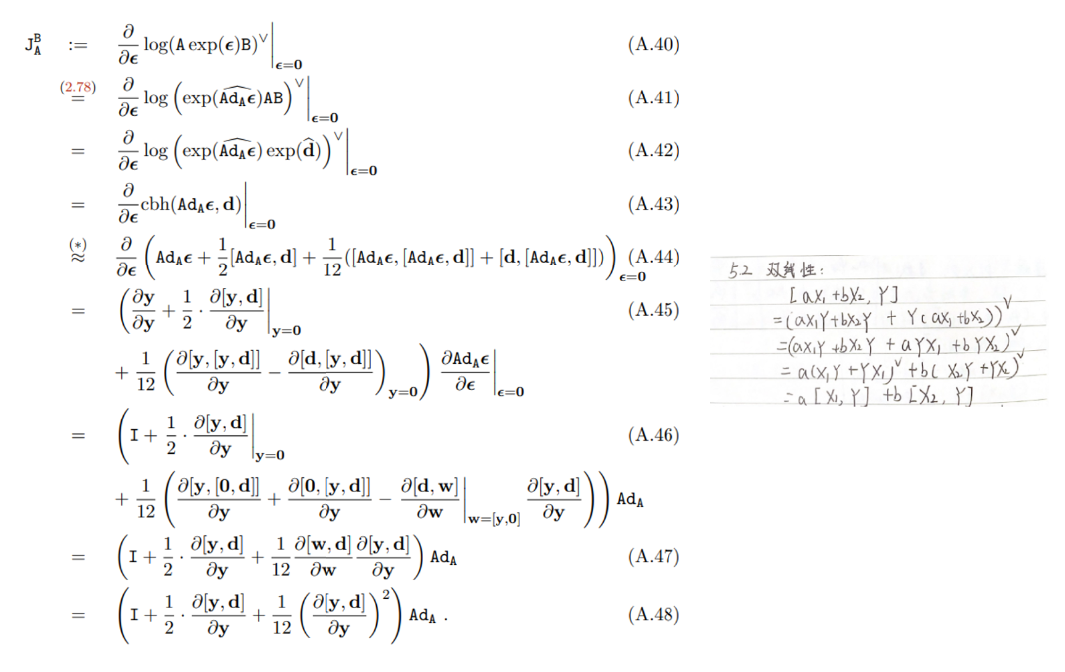
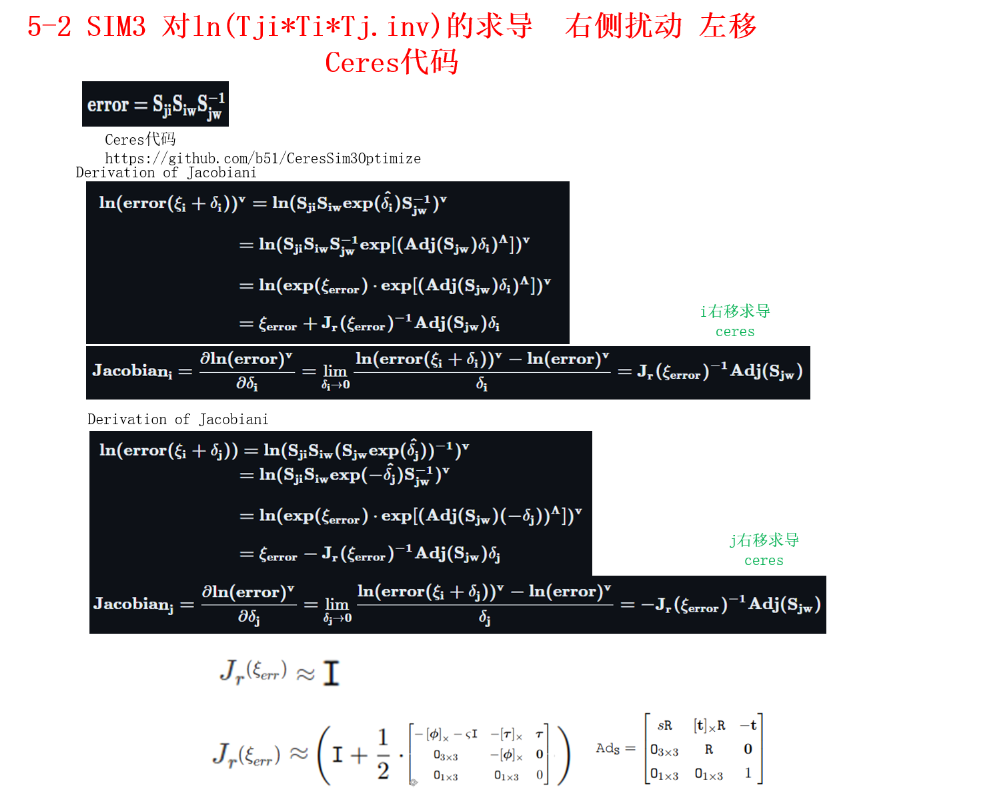
1伴随性质
https://blog.csdn.net/heyijia0327/article/details/51773578
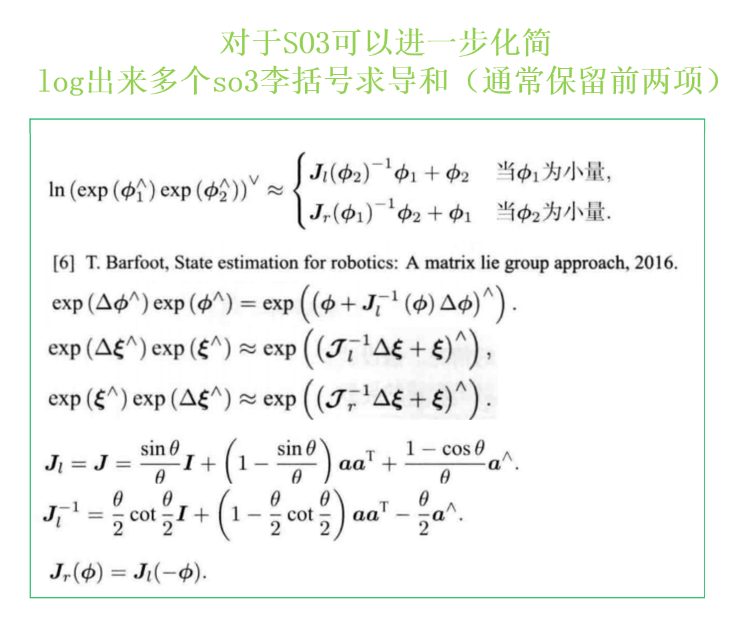
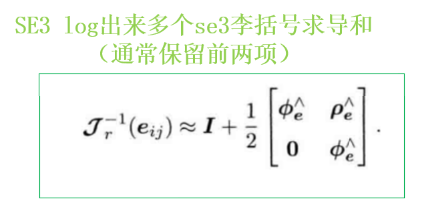
2 BCH近似
http://asrl.utias.utoronto.ca/~tdb/bib/barfoot_ser17.pdf
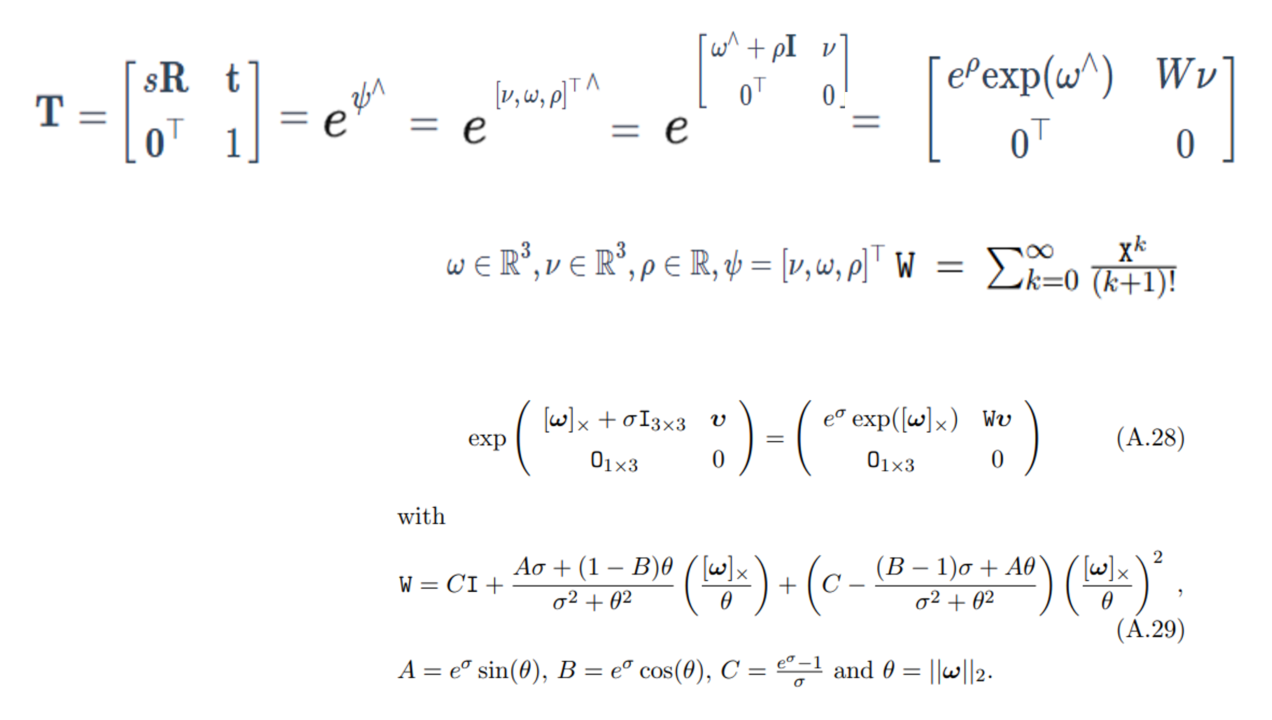
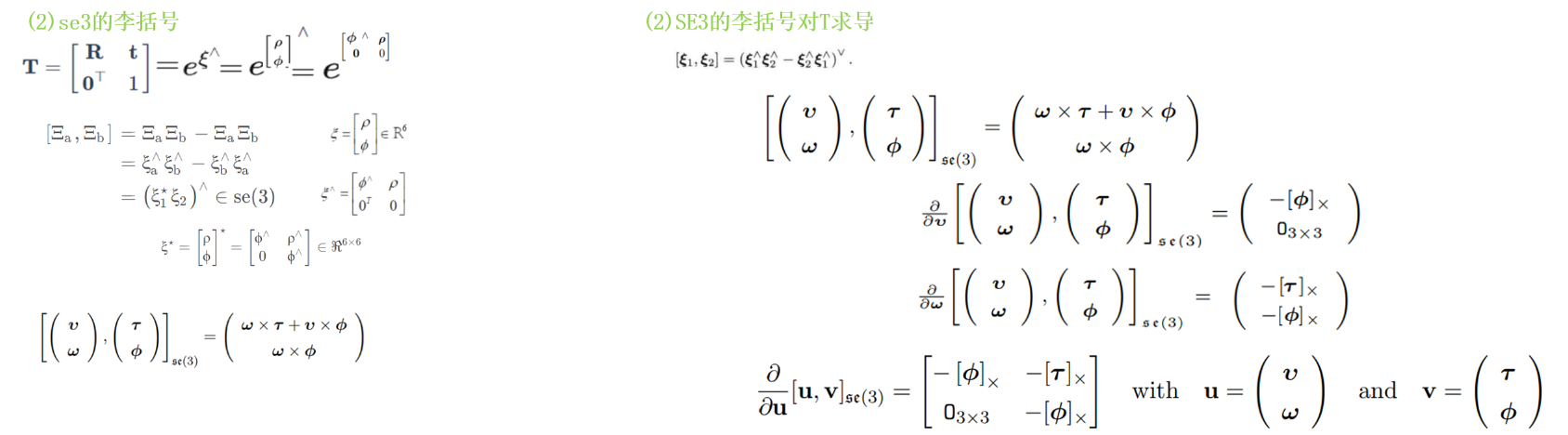
3-2 Adjoint Matrix of sim(3)
Local Accuracy and Global Consistency for Efficient Visual SLAM





 浙公网安备 33010602011771号
浙公网安备 33010602011771号