

https://mjwhite8119.github.io/Robots/mpu6050
介绍
本文将通过 C++ 代码示例和一些说明图来解释如何使用来自MPU6050设备的数据。MPU6050是一款惯性测量单元(IMU),它结合了 MEMS 陀螺仪和加速度计,并使用标准 I2C 总线进行数据通信。在本文中,我有时会使用术语 IMU 来指代MPU6050 。有许多很棒的文章解释了陀螺仪和加速度计的基本概念,我发现的最好的文章之一是在CH Robotics网站上。我在本文中使用了该站点的一些图像。在 Dronebot Workshop 上还有一段很棒的介绍性视频解释了MPU6050在这里。
MPU6050的机械部分如下图所示。 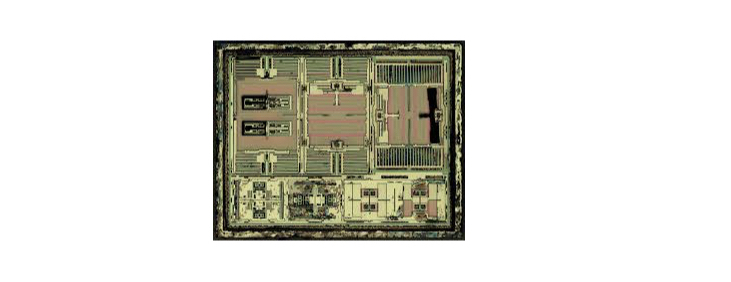
是的,它是微观的!但是更大的加速度计图将有助于显示正在发生的事情。
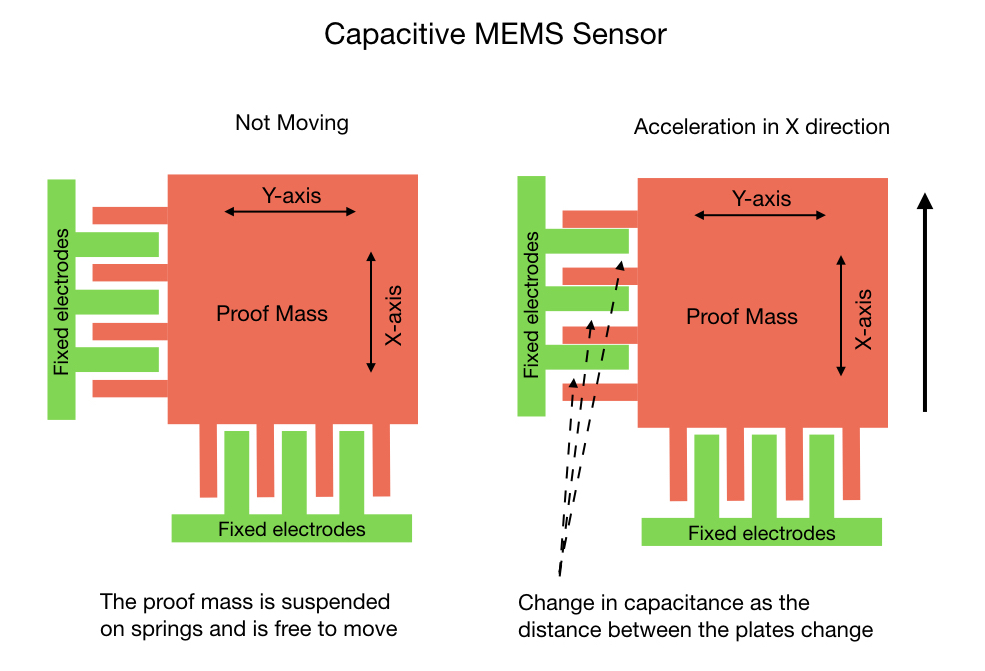
所谓的证明质量悬挂在弹簧上,并在设备加速时自由移动。固定的电极梳在自身和检测质量之间建立电容效应。当设备移动时,电容的变化会被记录并由 ADC 转换为 0 到 32,750 之间的数字值。陀螺仪以类似的方式工作,只是它基于科里奥利效应而不是加速度。
结果是MPU6050会向您抛出一堆数字,您需要解释它们以便在您的项目中使用。本文的其余部分有望帮助您理解这些数字。
设备灵敏度
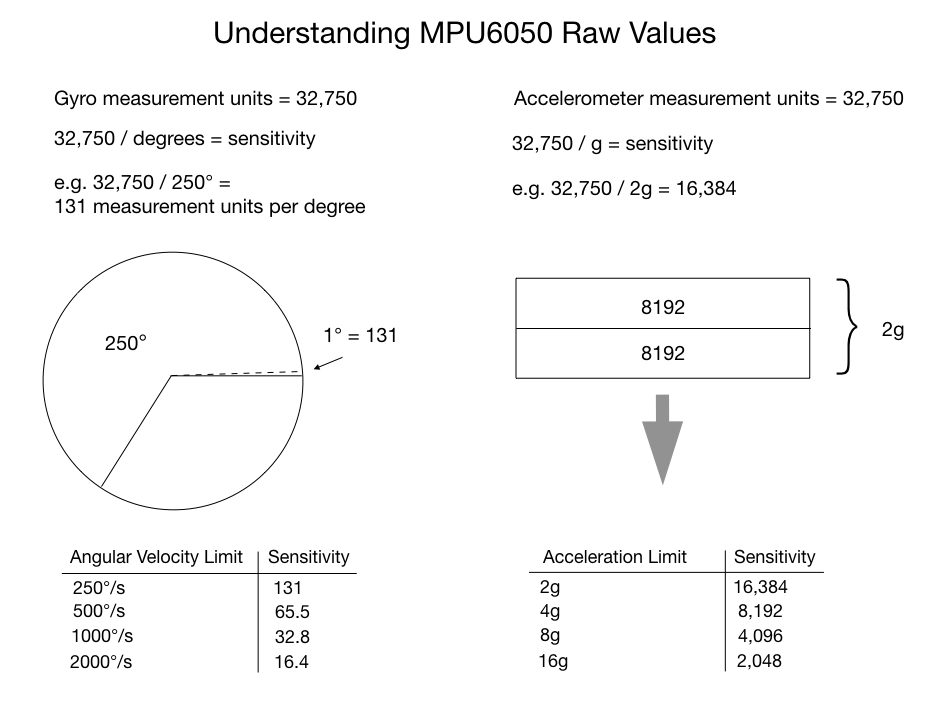
正如刚才提到的,从电容传感器读取的模拟电压被转换为 0 到 32750 值范围内的数字信号。这些值构成了陀螺仪和加速度计的测量单位。必须拆分测量单位以表示有意义的信息。MPU6050 _通过创建四个灵敏度级别来分配其测量单位,如下面的幻灯片所示。您选择的敏感级别取决于您将如何使用 IMU。例如,如果机器人要进行每秒超过 1000° (167 RPM) 的高速旋转,则应将陀螺仪灵敏度设置为 2000°。在这种情况下,由于陀螺仪必须在很短的时间内覆盖大量旋转地面,因此需要谨慎地拆分其测量单元。然而,对于大多数应用,机器人不太可能旋转得那么快,因此我们可以将灵敏度级别设置为 250°,这是默认设置。这为我们提供了每秒每度 131 个测量单位,从而提供了非常高的精度水平。
加速度计的默认设置为 2g。这应该适用于 F14 以外的大多数应用程序或构建 Tesla 的机械臂。
代码设置
因此,让我们开始查看使用MPU6050所需的代码。我将使用Jeff Rowberg 开发的i2cdev库之一,它显着简化了从MPU6050设备获取数据的工作。我在 Arduino 上安装了示例代码MPU6050_DMP6 。代码示例乍一看有点难以理解,所以我将通过它的关键部分并尝试解释发生了什么。设置代码的关键部分如下所示。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 | void mpu_setup(){ mpu.initialize(); pinMode(INTERRUPT_PIN, INPUT); // verify connection Serial.println(F("Testing device connections...")); Serial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed")); // load and configure the DMP Serial.println(F("Initializing DMP...")); devStatus = mpu.dmpInitialize(); // supply your own gyro offsets here, scaled for min sensitivity mpu.setXGyroOffset(220); mpu.setYGyroOffset(76); mpu.setZGyroOffset(-85); mpu.setZAccelOffset(1788); // 1688 factory default for my test chip // make sure it worked (returns 0 if so) if (devStatus == 0) { // turn on the DMP, now that it's ready Serial.println(F("Enabling DMP...")); mpu.setDMPEnabled(true); // enable Arduino interrupt detection Serial.println(F("Enabling interrupt detection (Arduino external interrupt 0)...")); attachInterrupt(digitalPinToInterrupt(INTERRUPT_PIN), dmpDataReady, RISING); mpuIntStatus = mpu.getIntStatus(); // set our DMP Ready flag so the main loop() function knows it's okay to use it Serial.println(F("DMP ready! Waiting for first interrupt...")); dmpReady = true; // get expected DMP packet size for later comparison packetSize = mpu.dmpGetFIFOPacketSize(); } else { // ERROR! // 1 = initial memory load failed // 2 = DMP configuration updates failed // (if it's going to break, usually the code will be 1) Serial.print(F("DMP Initialization failed (code ")); Serial.print(devStatus); Serial.println(F(")")); } } volatile bool mpuInterrupt = false; // indicates whether MPU interrupt pin has gone highvoid dmpDataReady() { mpuInterrupt = true;} |
默认情况下, initialize ()命令将加速度计设置为 +/- 2g,将陀螺仪设置为每秒 250%。这些是最敏感的设置。灵敏度设置已在上一节中进行了说明。testConnection ()将检查它是否可以找到与 IMU 关联的 I2C 设备地址。这应该是 0x68 或 0x69。
下一步是初始化数字运动处理器(DMP)。这是MPU6050的板载处理器,它结合了来自加速度计和陀螺仪的数据。DMP是使用MPU6050的关键,后面会详细说明。
与所有微处理器一样,DMP需要固件才能运行。dmpInitialize ( )命令加载固件并对其进行配置。它还会初始化 FIFO 缓冲区,该缓冲区将保存来自陀螺仪和加速度计的组合数据读数。如果初始化一切顺利,则启用DMP 。
有一些语句为陀螺仪和加速度计提供一些默认偏移量。我将在稍后有关校准的部分中回过头来讨论这些内容。
设置中断的代码的下一部分一开始有点令人困惑,因为我见过很多接线图都没有显示连接的中断引脚。事实证明,您可以在有中断和无中断的情况下使用MPU6050 。如果 IMU 用于需要您向机器人发送控制动作的项目,那么使用中断方法可能是不可取的,因为控制动作可能很难通过。在文章的最后,我将向您展示如何在没有中断的情况下(在轮询模式下)使用MPU6050 。当 MPU 的数据缓冲区已满时,中断仅调用一个设置标志的短 ISR。ISR 显示在上述代码示例的末尾。
校准
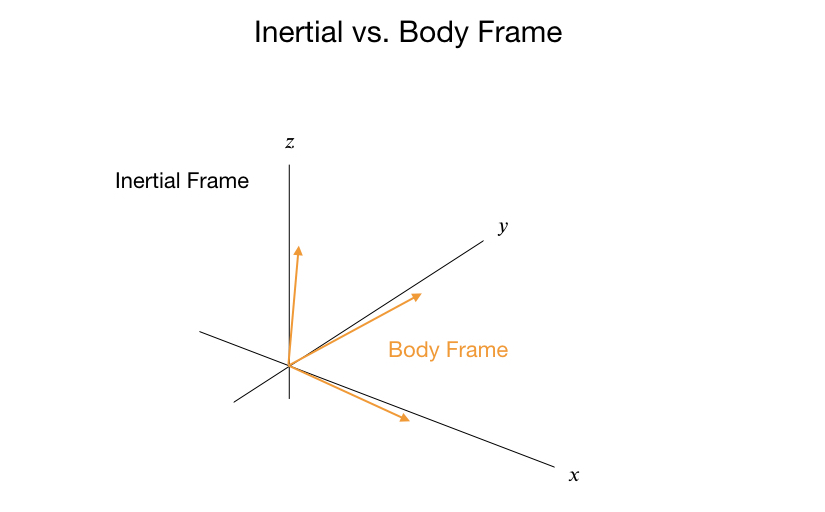
在项目中使用 IMU 之前,必须对其进行校准。安装在机器人上的 IMU 不会与地面完美对齐,因此您需要从加速度计和陀螺仪进行一系列数据测量以产生偏移量。从物理学的角度来看,偏移提供了从Body Frame到Inertial Frame 的转换。Body Frame是安装在机器人上的 IMU,而Inertial Frame是完成所有角度和速度计算的框架。

有几个过程可用于校准传感器。我在以下过程中取得了一些成功,它使用了我在此处找到的 Luis Ródenas 编写的代码。将MPU6050安装到机器人上后,只需运行一次代码并记下最终输出。输出将是一组六个偏移值,您可以将其硬编码到脚本中。
在该过程开始时,所有加速度计和陀螺仪偏移都设置为零。然后我们从 IMU 中获取 1000 个读数并计算每个偏移量的平均值。然后将这些值输入 IMU 以成为新的偏移量。校准例程将继续获取平均 IMU 读数,直到校准在某个公差范围内。根据 CPU 的速度,校准可能需要一些时间才能运行。
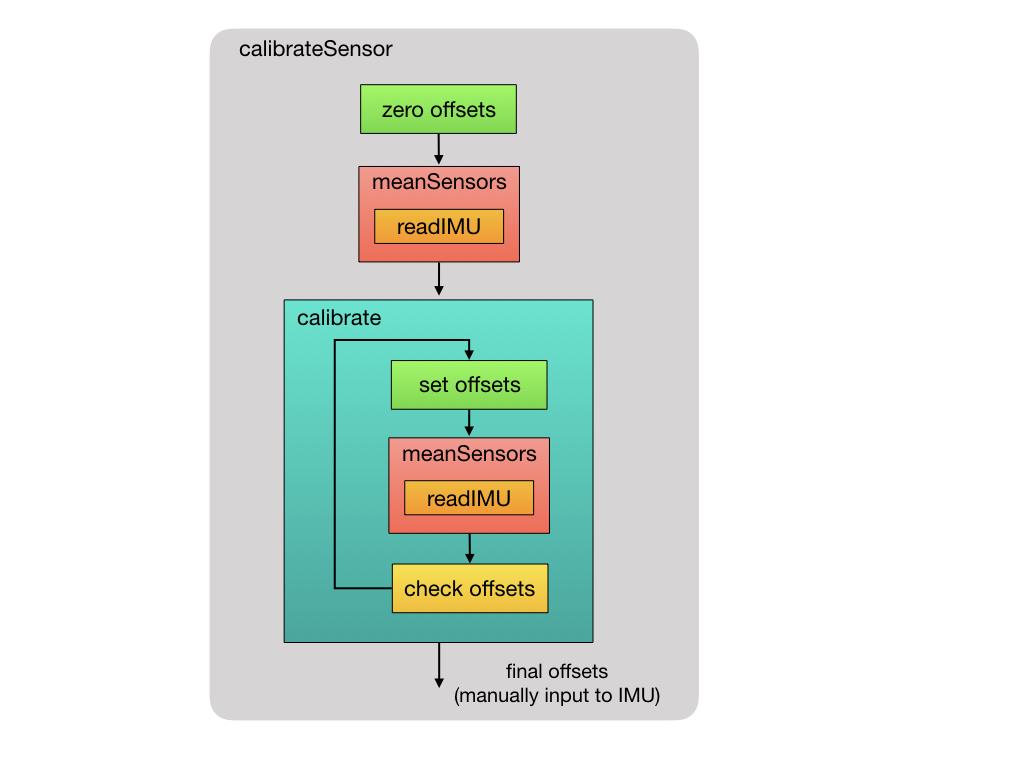
 因此,让我们看一下我正在使用的校准代码,它是由 Luis Ródenas 编写的。从 IMU 读取原始加速度和陀螺仪数据。如上图所示,此功能用于校准过程中的多个点。
1 2 3 4 5 6 7 8 9 10 11 12 13 | //--------------------------------------------//// Read the raw sensor values//--------------------------------------------//void IMU::readIMU() { // Using the MotionApps library accX = mpu.getAccelerationX(); accY = mpu.getAccelerationY(); accZ = mpu.getAccelerationZ(); gyroX = mpu.getRotationX(); gyroY = mpu.getRotationY(); gyroZ = mpu.getRotationZ();} |
校准过程首先将 IMU 偏移归零。从 IMU 读取最初的 1000 个测量值并计算平均值。然后我们进入主校准程序,循环直到偏移量在公差范围内。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 | //----------------------------------------------------//// Calibrate bias of the accelerometer and gyroscope// Sensor needs to be calibrated at each power cycle.//----------------------------------------------------//void IMU::calibrateSensor(){ // Initialize the offset values setOffsets(0, 0, 0, 0, 0, 0); ROSLOGString("Reading sensors for first time..."); meanSensors_(); delay(1000); ROSLOGString("Calculating offsets..."); calibrate_(); delay(1000);} |
meanSensor( ) 例程如下所示。丢弃前 100 个读数,然后累积 1000 个测量值并除以样本大小。插入延迟以确保没有重复数据读取。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 | int buffersize=1000; // Number of readings used to average//--------------------------------------------//// Get the mean values from the sensor //--------------------------------------------//void IMU::meanSensors_() { long i=0,buff_ax=0,buff_ay=0,buff_az=0,buff_gx=0,buff_gy=0,buff_gz=0; while (i<(bufferSize+101)) { // read raw accel/gyro measurements from device readIMU(); if (i>100 && i<=(bufferSize+100)) { //First 100 measures are discarded buff_ax=buff_ax+accX; buff_ay=buff_ay+accY; buff_az=buff_az+accZ; buff_gx=buff_gx+gyroX; buff_gy=buff_gy+gyroY; buff_gz=buff_gz+gyroZ; } if (i==(bufferSize+100)){ mean_ax=buff_ax/bufferSize; mean_ay=buff_ay/bufferSize; mean_az=buff_az/bufferSize; mean_gx=buff_gx/bufferSize; mean_gy=buff_gy/bufferSize; mean_gz=buff_gz/bufferSize; } i++; delay(2); //Needed so we don't get repeated measures }} |
这是校准过程的主循环。查看代码段,如果您仍然对它的工作原理感到困惑(就像我一样),请继续阅读。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 | int acel_deadzone=8; //Accelerometer error allowedint giro_deadzone=1; //Giro error allowed//--------------------------------------------//// Calibrate sensor//--------------------------------------------//void IMU::calibrate_() { ax_offset=-mean_ax/8; ay_offset=-mean_ay/8; az_offset=(16384-mean_az)/8; gx_offset=-mean_gx/4; gy_offset=-mean_gy/4; gz_offset=-mean_gz/4; while (1){ int ready=0; mpu.setXAccelOffset(ax_offset); mpu.setYAccelOffset(ay_offset); mpu.setZAccelOffset(az_offset); mpu.setXGyroOffset(gx_offset); mpu.setYGyroOffset(gy_offset); mpu.setZGyroOffset(gz_offset); // Get the mean values from the sensor meanSensors_(); logMeanValues(); if (abs(mean_ax)<=acel_deadzone) ready++; else ax_offset=ax_offset-mean_ax/acel_deadzone; if (abs(mean_ay)<=acel_deadzone) ready++; else ay_offset=ay_offset-mean_ay/acel_deadzone; if (abs(16384-mean_az)<=acel_deadzone) ready++; else az_offset=az_offset+(16384-mean_az)/acel_deadzone; if (abs(mean_gx)<=giro_deadzone) ready++; else gx_offset=gx_offset-mean_gx/(giro_deadzone+1); if (abs(mean_gy)<=giro_deadzone) ready++; else gy_offset=gy_offset-mean_gy/(giro_deadzone+1); if (abs(mean_gz)<=giro_deadzone) ready++; else gz_offset=gz_offset-mean_gz/(giro_deadzone+1); if (ready==6) break; }} |
开始时,平均值取自上一步并用于提供初始偏移值。为了获得经过良好校准的系统,计划是使这些值尽可能小。这是 IMU 偏移设置为零后的初始平均值示例。
1 2 | Acclerometer 8531, -31407, 2727Gyroscope 20, -34, 14 |
如您所见,还有很长的路要走,因此作为第一次切割,我们采用了平均值的一部分。我不确定除数是如何得出的,但它确实得出了一个有点接近最终偏移值的值:
1 2 3 4 5 6 | ax_offset -1066ay_offset 3925az_offset 1707gx_offset -5gy_offset 8gz_offset -3 |
进入循环,将偏移值输入到 IMU,并获取一组新的平均值。使用新的偏移量,下一组平均值开始看起来好多了。
1 2 | Acclerometer 153, -1084, 16117Gyroscope 13, -23, 10 |
将这些除以死区常数并从当前偏移量中减去它会产生 IMU 的新偏移量:
1 2 3 4 5 6 | ax_offset -917ay_offset 3192az_offset 1469gx_offset -13gy_offset 23gz_offset -9 |
每次循环运行时,平均值都会变得越来越小。所以它一直持续下去,直到平均值在允许的误差范围内,此时它退出循环,我们就完成了。如果您不想每次打开机器人时都运行校准例程,请将这些偏移值硬编码到项目的设置例程中。
获得方向
有两种方法可以从MPU6050中提取有用的数据。一种方法是读取原始传感器数据值,就像我们在校准过程中所做的那样,并使用该数据计算新方向。第二种方法是从 MPU 的板载数字运动处理器(DMP)中提取数据。要了解这两种方法之间的区别,我们可以看一个如何获得俯仰角的示例。如果您正在为平衡机器人编码,俯仰角将是保持机器人直立的关键。
要使用原始传感器数据获得俯仰角,需要进行多种转换。
EG4YAup2hySgcimq8MkLuB6e34rNB2SF9h94LL1ryzzq
在进行任何计算之前,您必须使用 IMU 偏移量将身体坐标系的读数转换为惯性坐标系。
您需要将原始 IMU 传感器读数转换为度数。
为了减轻漂移的影响,您需要将陀螺仪信息与来自加速度计的读数结合起来。
让我们一一进行。
陀螺仪不报告角度,它们报告设备转动的速度或角速度。为了获得角度位置,您必须随着时间的推移对其进行积分。下面的代码显示了应用于来自陀螺仪的角速率信息的时间积分。
要将机器人的主体坐标系带入惯性坐标系,您必须减去偏移量。偏移值是在校准过程中计算的。如果您要使用原始传感器数据,那么这些偏移值必须存储在您的程序变量中。
在应用积分之前,需要将原始传感器读数转换为度数。这是通过将读数除以灵敏度测量单位来完成的。回想一下,在最高灵敏度设置下,每个度数由 131 个测量单位表示。
1 2 3 4 5 6 7 8 9 10 11 | //--------------------------------------------//// Get angle from the gyroscope. Uint: degree//--------------------------------------------//float IMU::getGyroRoll(int gyroX, int gyroBiasX, uint32_t lastTime){ float gyroRoll; //integrate gyroscope value in order to get angle value gyroRoll = ((gyroX - gyroBiasX ) / 131) * ((float)(micros() - lastTime) / 1000000); return gyroRoll;} |
以下代码显示了如何计算来自加速度计的俯仰角。可以在网上找到用于计算偏航角、俯仰角和横滚角的公式。同样,您需要减去偏移值。生成的输出以弧度为单位,需要将其转换为度数。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 | //-----------------------------------------------////Get angle from the accelerometer. Uint: degree//-----------------------------------------------//float IMU::getAccRoll(int accY, int accBiasY, int accZ, int accBiasZ){ float accRoll; //calculate angle value accRoll = (atan2((accY - accBiasY), (accZ - accBiasZ))) * RAD_TO_DEG; if (accRoll <= 360 && accRoll >= 180) { accRoll = 360 - accRoll; } return accRoll;} |
在计算来自加速度计和陀螺仪的俯仰角后,使用互补滤波器来减轻加速度计受到的振动影响,更重要的是,陀螺仪的长期漂移效应。
那么漂移从何而来?正如刚才提到的,陀螺仪不报告角度,它们报告设备转动的速度。为了获得角度位置,您必须随着时间的推移对其进行积分。你可能还记得你在微积分课上学过的,要获得位置,你必须对速度进行积分。由于计算机上使用的时间段有一些定义的长度,例如 10 毫秒,因此积分过程会在位置计算中引入一个小误差。随着时间的推移,这些小错误的累积是导致漂移的原因。当然,时间段越小,漂移就越小,但最终您会遇到 CPU 速度的限制。
互补滤波器计算显示在下面的代码中。有关互补滤波器以及如何调整它们的更多信息,可以在线找到。由于减轻陀螺仪漂移是我们的主要目标,因此代码显示滤波器在该方向上的权重很大。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 | //--------------------------------------------//// Get current angle of the robot//--------------------------------------------//float IMU::currentAngle() { // Get raw IMU data readIMU(); // Complementary filter for angle calculation float gRoll = getGyroRoll(gyroX, gx_offset, lastTime); float aRoll = getAccRoll(accY, ay_offset, accZ, az_offset); float angleGet = 0.98 * (angleGet + gRoll) + 0.02 * (aRoll); lastTime = micros(); // Reset the timer return angleGet;} |
使用数字运动处理器 (DMP)
所以为了获得俯仰角需要做很多工作!让我们看看如何使用MPU6050的板载数字运动处理器获得俯仰角。DMP卸载了通常必须在微处理器上进行的处理。它维护一个内部缓冲区,该缓冲区结合来自陀螺仪和加速度计的数据并为您计算方向。DMP还负责应用偏移量,因此您不必在项目代码中跟踪这些。这是DMP内部 FiFo 缓冲区的格式。
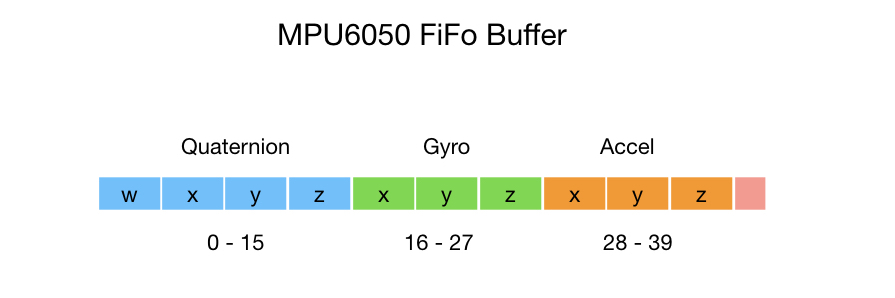
要将DMP的缓冲区读入您的程序,您可以使用以下语句序列。检查中断状态并将缓冲区读入本地程序变量。一旦完成,就可以访问方向信息。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 | // Check for DMP data ready interrupt (this should happen frequently)if (mpuIntStatus & 0x02) { // wait for correct available data length, should be a VERY short wait while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount(); // read a packet from FIFO mpu.getFIFOBytes(fifoBuffer, packetSize); // track FIFO count here in case there is > 1 packet available // (this lets us immediately read more without waiting for an interrupt) fifoCount -= packetSize; // get quaternion values in easy matrix form: w x y z mpu.dmpGetQuaternion(&q, fifoBuffer);} |
方向由四元数表示。四元数是一种表示物体在 3D 空间中的方向的方法,可以在计算机上高效计算。它们还避免了旋转角度超过 90° 时出现的问题,称为Gimbal Lock。除非您正在从事无人机项目,否则您可能不会遇到Gimbal Lock问题,因此您可以安全地忽略它。四元数有点难以理解,这就是为什么他们在 100 多年的时间里都被欧拉角所忽视。但是,如果您认真对待机器人技术,就不能太长时间忽视四元数这个主题。有许多学习四元数的在线资源,但我将提供一个我认为有用的可视化资源。
四元数
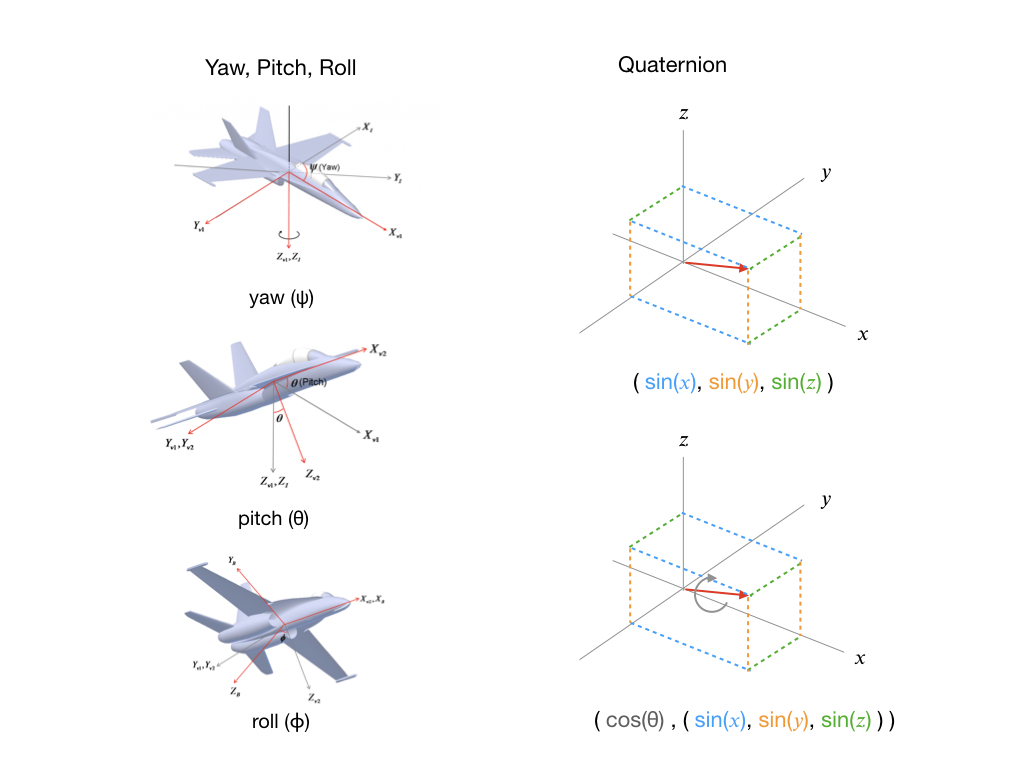
要理解四元数,将它们与 Yaw、Pitch、Roll 进行比较是很有用的,这是大多数人更熟悉的概念。要表示方向的变化,您首先要指定偏航角,即围绕 z 轴的旋转。然后加上Pitch,也就是绕y轴旋转。最后绕 x 轴滚动。当然,飞机可能会以不同的顺序执行此操作,或者更有可能同时执行此操作,但最终结果仍然是方向发生变化。这里的关键是你只需要三个参数 (ψ, θ, ϕ) 来表示转换。
将此与莫名其妙地需要四个参数的四元数进行对比。所以四元数首先要使用一个向量并将它指向你需要去的方向。这由下图中的红色箭头表示,并且始终是一个单位的长度。由于箭头可以指向 3D 空间中的任何地方,我们需要三个参数来定义它。方向参数以sines形式给出。一旦我们有了方向,我们就可以执行一个滚动来让我们到达最终方向。这就是第四个参数的目的。它以度数(或弧度)指定我们需要旋转多少。

为了确保方向数据对所有应用程序都有用,DMP将其计算存储为四元数。Jeff Rowberg 的程序为您提供了一种将四元数转换为其他有用信息(例如欧拉角和线性加速度)的简单方法。
欧拉角
一旦我们从DMP中检索到数据,我们就可以使用它来获取欧拉角。四元数值被传递到dmpGetEuler()函数以将它们转换为欧拉角。输出以弧度表示,因此如果需要可以转换为度数。可以在线找到将四元数转换为欧拉角的公式,也可以通过检查 Jeff Rowberg 的图书馆找到。
1 2 3 4 5 6 | mpu.dmpGetQuaternion(&q, fifoBuffer);mpu.dmpGetEuler(euler, &q);float psi = euler[0] * 180/M_PI;float theta = euler[1] * 180/M_PI;float phi = euler[2] * 180/M_PI; |
EG4YAup2hySgcimq8MkLuB6e34rNB2SF9h94LL1ryzzq 欧拉角被指定为不考虑重力的纯粹方向变化。
偏航、俯仰、滚转
正如您之前看到的,计算音高信息需要一些编程。将此与从DMP获取音高进行对比,这可以在四个语句中完成。首先需要从预先计算的四元数数据中提取重力分量。然后将重力传递给函数以获得音高。
1 2 3 4 5 | mpu.dmpGetQuaternion(&q, fifoBuffer);mpu.dmpGetGravity(&gravity, &q);mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);float pitch = ypr[1] * 180/M_PI; |
加速度
DMP的缓冲区中也提供加速度数据。然而,由于 IMU 正在移动,加速度计报告的力不仅是地球的力,而且是导致它加速的力。因此,您需要从计算中去除重力以获得线性加速度。如前所述,可以从四元数中提取重力分量,因此我们将它们与加速度读数一起使用来计算线性加速度。
1 2 3 4 5 6 7 8 | // display real acceleration, adjusted to remove gravitympu.dmpGetQuaternion(&q, fifoBuffer);mpu.dmpGetAccel(&aa, fifoBuffer);mpu.dmpGetGravity(&gravity, &q);mpu.dmpGetLinearAccel(&aaReal, &aa, &gravity);float x = aaReal.x;float y = aaReal.y;float z = aaReal.z; |
轮询 IMU
MPU6050可以在不使用中断的情况下使用。在此模式下,您将在主控制循环内轮询 IMU。如果您需要向机器人发送其他控制操作,而不希望 IMU 中断使 CPU 不堪重负,则首选此方法。此函数在您的主控制循环中调用。DMP的 FiFo 缓冲区的填充速度比您的控制循环快得多,因此需要清除它,以便我们拥有最新的值。我们等待缓冲区被填满,然后将其返回给程序。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 | void IMU::readFifoBuffer_() { // Clear the buffer so as we can get fresh values // The sensor is running a lot faster than our sample period mpu.resetFIFO(); // get current FIFO count fifoCount = mpu.getFIFOCount(); // wait for correct available data length, should be a VERY short wait while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount(); // read a packet from FIFO mpu.getFIFOBytes(fifoBuffer, packetSize);} |



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 全程不用写代码,我用AI程序员写了一个飞机大战
· DeepSeek 开源周回顾「GitHub 热点速览」
· 记一次.NET内存居高不下排查解决与启示
· MongoDB 8.0这个新功能碉堡了,比商业数据库还牛
· .NET10 - 预览版1新功能体验(一)
2021-12-10 SolidWorks2020学习(5)拉伸 抠出 基准面设置 放样边界
2021-12-10 SolidWorks2020学习(4)镜像 移动 拉伸切除 旋转
2021-12-10 SolidWorks2020学习(3)基本画图命令
2018-12-10 matlab 整局-部视知觉实验(读取excel点阵设计图替换数据)