


飞机油门 1000-2000 ms 频率50hz 单个周期1/50HZ=20ms
1首先了解下遥控器是如何控制云台的
简单来说,遥控器输出pwm1000-2000来控制云台、
https://blog.csdn.net/qq_45598353/article/details/119064475
原理:arduino模拟遥控器
以无人机的无刷电机为例,遥控器与无刷电机进行校准:
1.遥控器将油门打到最大
2.接收机油门输出端口的pwm输出最大,(一般在2000左右)
3.pwm输出到电调
4.给电调上电
5.因为输出到电调的pwm比较大,电调进行校对,设定现在的值为最大值,并发出滴滴声
6.遥控器将油门打到最小
7.接收机油门油门输出端口的pwm输出最小,(一般在1000左右)
8.pwm输出到电调
9.电调设定现在的值为最小值,并发出滴滴滴声
10.慢慢把遥控器往上掰,无刷电机开始转动。
我们用arduino代替遥控器和接收机,只需要arduino去模拟遥控器的pwm输出给电调就好了,不用纠结接收机的pwm具体是多少,因为电调会和arduino的pwm重新校对最大值和最小值。
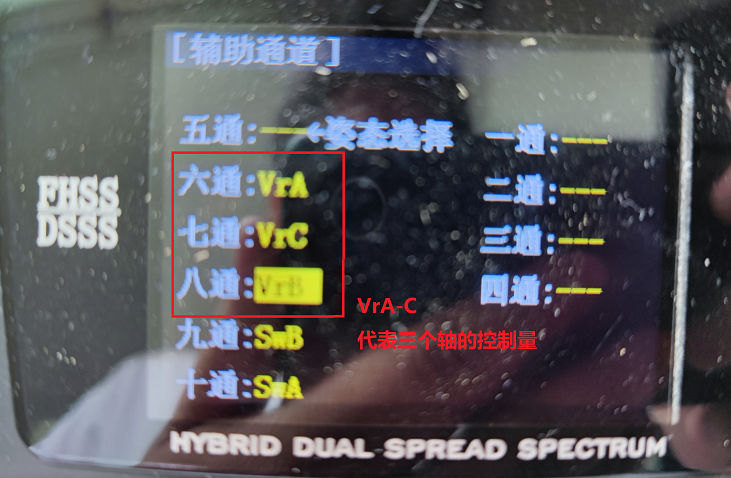
1 确定遥控器各通道和对应的按钮
可以配合pix地面站,波动遥控器查看
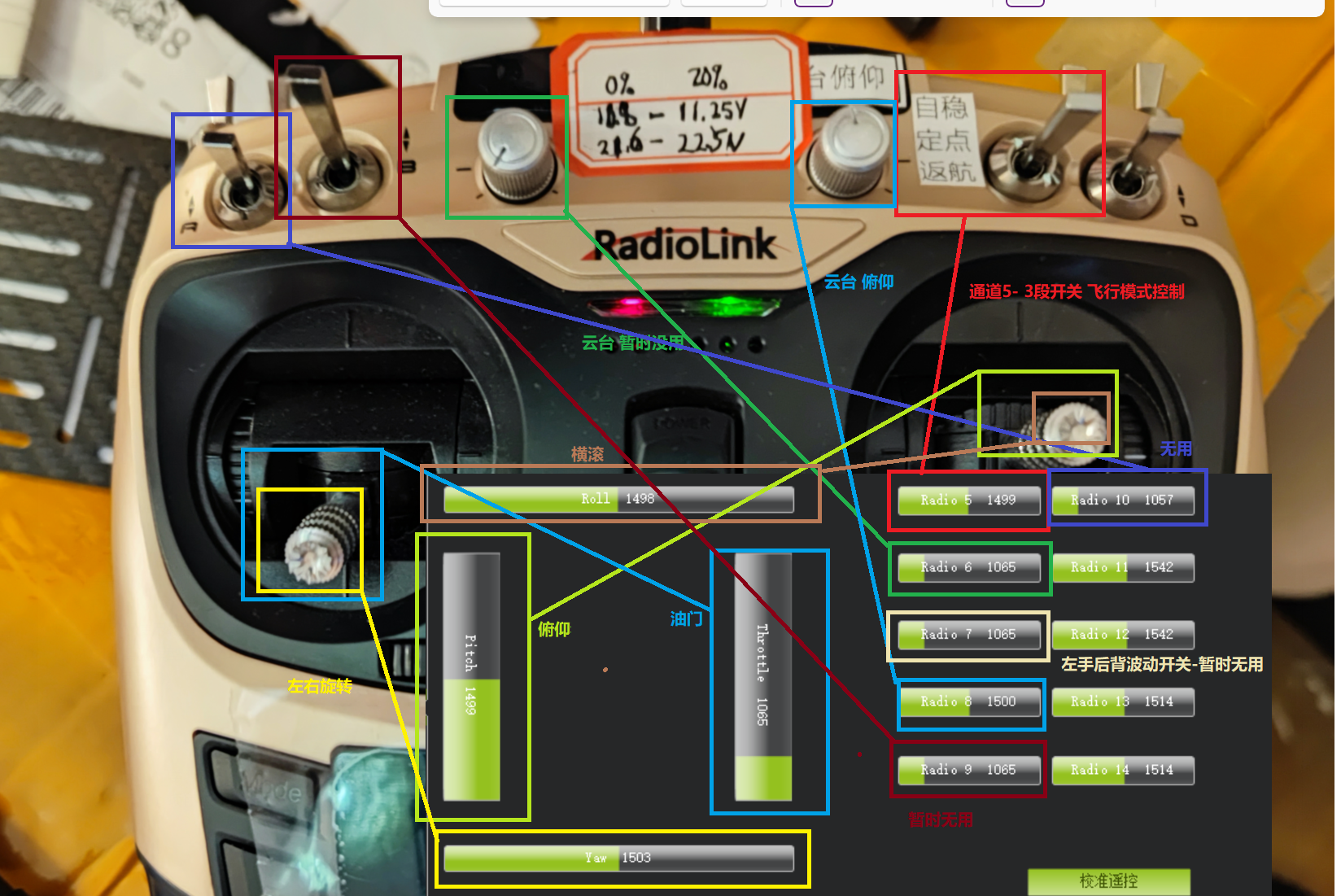
2设置控制模式
例如设置通道8和通道6控制云台的旋转
设置遥控器
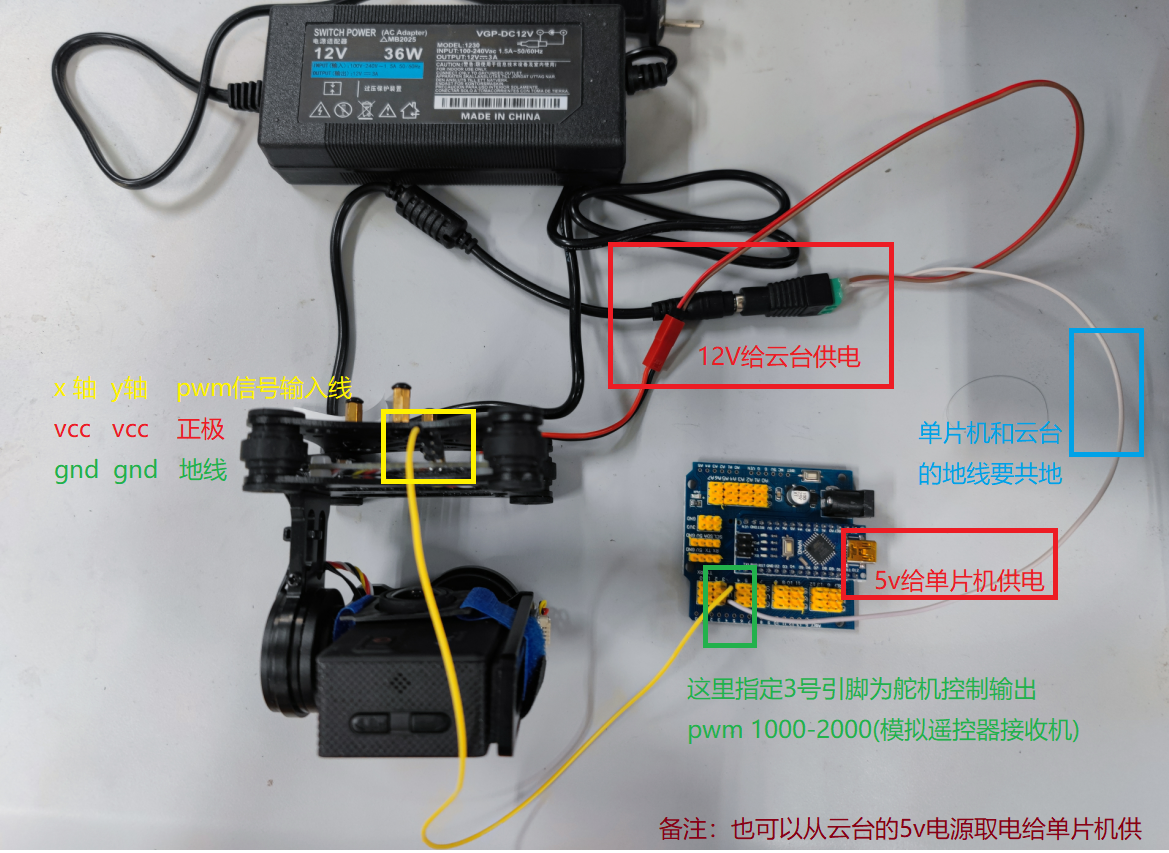
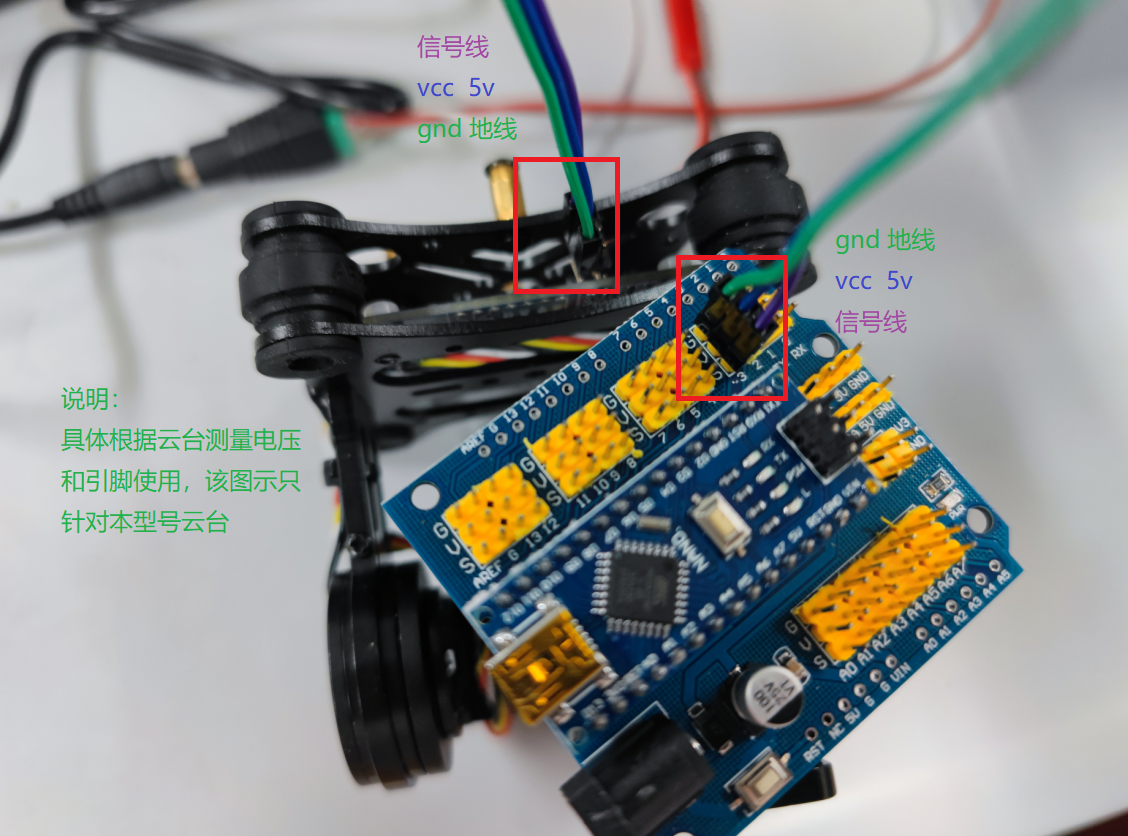
3连线和控制
接收机的6-8通道 接触杜邦线,插在云台的接口上
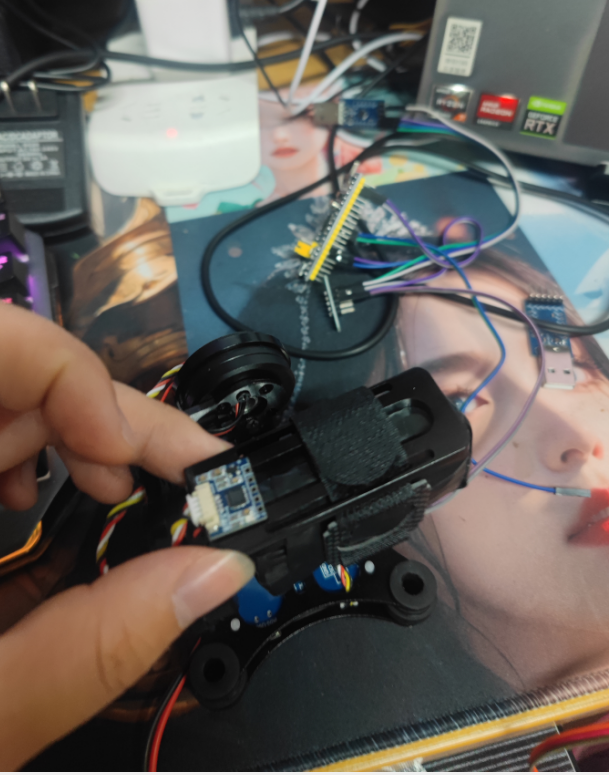
这里用的是一个轴云台 分别是x 和y党乡的控制
2 模拟控制
三轴云台storm32 BGC HAKRC调试+
https://item.taobao.com/item.htm?spm=a1z0d.7625083.1998302264.5.5c5f4e69ZXr5PC&id=41842088229
诸如此类的云台,都是遥控器pwm控制(1000-2000)

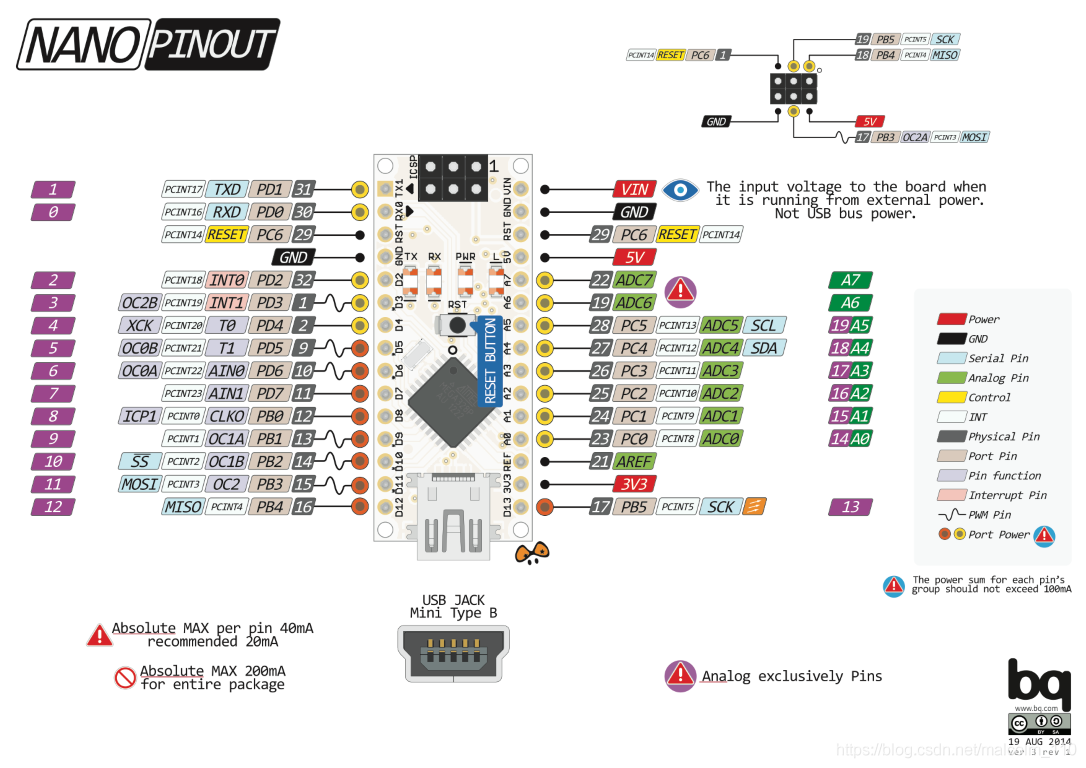
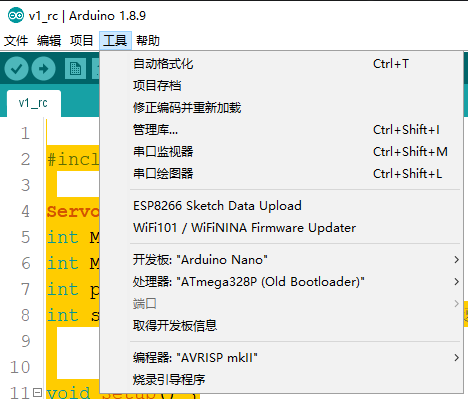
单片机 arduino nano
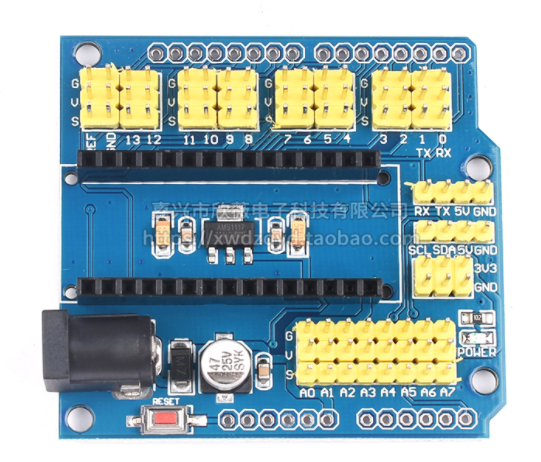
扩展版 要不要无所谓(引脚用的少)
ARduino控制
单片机程序
样例1 单个引脚控制一个自由度
如果超出范围 自己讲1000-2000对应到具体的角度
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 | #include <Servo.h> Servo myservo1;//int Max=2000; //转速最大时候的pwmint Min=1000; //转速最小时候的pwmint pos=Min; //初始转速赋值int sign=0; //标志位,用于切换转速增大还是减小 void setup() { myservo1.attach(3); //pwm输出口为9号端口 myservo1.write(Max); //输出定义的pwm最大值,模拟遥控器油门打到最大 delay(5000); //等待电机设定最大值,会滴滴的发出声音 myservo1.write(Min); //输出定义的pwm最小值,模拟遥控器油门打到最小 delay(5000); //等待电机设定最小值,会滴滴滴的发出声音 Serial.begin(9600); }void loop() //电机转速从小变大再变小,反复循环. pwm数值会从串口输出。{ delay(10); if(sign==0) //让转速逐渐增大,增大到最大速度的一半 { Serial.println(pos); myservo1.write(pos); //输出pwm到9号端口 pos++; if(pos==(Max+Min)/2) sign=1; } if(sign==1) //让转速逐渐减小,减小到电机停止转动 { Serial.println(pos); myservo1.write(pos); //输出pwm到9号端口 pos--; if(pos==Min) sign=0; } } |
样例2 上电自检 0-180度 180度到0度
串口输入 0-180
90; 敲回车发送控制转到90度
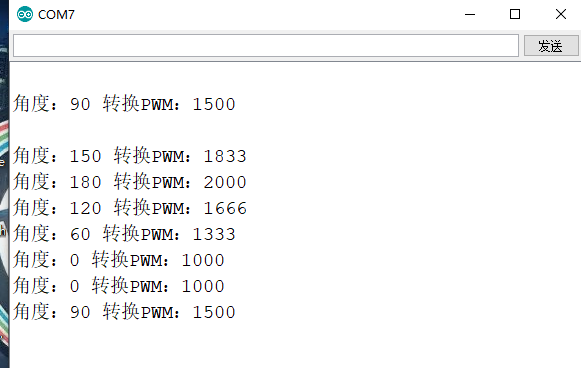
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 | #include <Servo.h> Servo myservo_x;//pwm类int pin_x=3; //x引脚 x y zint Max=2000; //转速/角度最大时候的pwm 180度(具体度数实际测量可能是270度)int Min=1000; //转速/角度最小时候的pwm 0度int zhong=int(Max+Min)/2;//转速/角度中间时候的pwm 90度int pos=Min; //初始转速赋值 //电机转速从小变大再变小,反复循环. pwm数值会从串口输出。void Test_MinToMax(){ for(int i=Min;i<=Max;i++) { myservo_x.write(i); delay(10); } for(int i=Max;i>=Min;i--) { myservo_x.write(i); delay(10); } }int SetDegreeToPWM(int jiaodu){ int Pwm=int((Min+Max)/2); if(jiaodu<0){jiaodu=0;Pwm=Min;} else if(jiaodu>180){jiaodu=180;Pwm=Max;} else{Pwm=int(float(jiaodu)/180.0*float(Max-Min)+float(Min));} Serial.print("角度:"); Serial.print(jiaodu); Serial.print(" 转换PWM:"); Serial.println(Pwm); return Pwm ; } void setup() { myservo_x.attach(pin_x); //pwm输出口为9号端口 myservo_x.write(SetDegreeToPWM(0)); delay(3000); Test_MinToMax();//min-max-min delay(3000); myservo_x.write(SetDegreeToPWM(90)); delay(3000); Serial.begin(9600); while(Serial.read()>= 0){} //clear serialbuffer}void loop() { if(Serial.available()>0){ String comdata =Serial.readStringUntil(";"); int jiaodu=comdata.toInt(); int Pwm_=SetDegreeToPWM(jiaodu); myservo_x.write(Pwm_); delay(10); } } |
STM32控制
直接舵机角度控制 无需再转化
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 | #include <Servo.h> Servo myservo_x;//pwm类int pin_x=PA6 ; //x引脚 x y zint Max=2000; //转速/角度最大时候的pwm 180度(具体度数实际测量可能是270度)int Min=1000; //转速/角度最小时候的pwm 0度int zhong=int(Max+Min)/2;//转速/角度中间时候的pwm 90度int pos=Min; //初始转速赋值 //电机转速从小变大再变小,反复循环. pwm数值会从串口输出。void Test_MinToMax(){ for(int i=Min;i<=Max;i++) { myservo_x.write(i); delay(10); } for(int i=Max;i>=Min;i--) { myservo_x.write(i); delay(10); } } int SetDegreeToPWM(int jiaodu){ int Pwm=int((Min+Max)/2); if(jiaodu<0){jiaodu=0;Pwm=Min;} else if(jiaodu>180){jiaodu=180;Pwm=Max;} else{Pwm=int(float(jiaodu)/180.0*float(Max-Min)+float(Min));} Serial1.print("角度:"); Serial1.print(jiaodu); Serial1.print(" 转换PWM:"); Serial1.println(Pwm); return Pwm ; } void setup() { Serial1.begin(9600); while(Serial1.read()>= 0){} //clear serialbuffer Serial1.println("开始运行,请输入0-180,默认90度,指令 “度数;” "); myservo_x.attach(pin_x); //pwm输出口为9号端口 myservo_x.write(SetDegreeToPWM(90)); delay(10); // Test_MinToMax();//min-max-min// delay(3000);//// myservo_x.write(SetDegreeToPWM(90));// delay(3000); } void loop() { if(Serial1.available()>0){ String comdata =Serial1.readStringUntil(';'); int jiaodu=comdata.toInt(); int Pwm_=SetDegreeToPWM(jiaodu); String msg=String("设定角度: ")+String(jiaodu)+" pwm:"+String(Pwm_); Serial1.println(msg); myservo_x.write(jiaodu); delay(10); } } |
python 树莓派 pca6805
pca 3.3V SCL SDA GNS (5V+ NO NEED )
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 | import cv2import socketimport structimport pickleimport threadingimport RPi.GPIO as GPIOfrom Adafruit_PCA9685 import PCA9685import busiofrom board import SCL, SDA#SCL (时钟线):GPIO 3(物理引脚 5)#SDA (数据线):GPIO 2(物理引脚 3)import time # 初始化 GPIOGPIO.setmode(GPIO.BCM) # L298N 电机驱动引脚# M1 left-qian M2 right-qian M3 left-hou M4-right-houmotor_pins = { "M1": (4, 17), "M2": (27, 22), "M3": (5, 6), "M4": (13, 19),} for pins in motor_pins.values(): GPIO.setup(pins[0], GPIO.OUT) GPIO.setup(pins[1], GPIO.OUT) # 初始化 I2C 连接 (PCA9685)i2c = busio.I2C(SCL, SDA)if not i2c.try_lock(): print("I2C 未能成功初始化!") else: try: print("I2C 初始化成功!") finally: i2c.unlock() # 释放 I2C 锁pca = PCA9685()pca.set_pwm_freq(50)pca.frequency = 50 # 设置 PWM 频率为 50Hz(舵机标准)#使用 树莓派 + PCA9685 模拟四旋翼无人机 遥控器(RC)PWM 信号。#输出 四个通道的 PWM 信号,分别对应 油门、偏航、俯仰、横滚(Throttle, Yaw, Pitch, Roll)。#PWM 范围:1000us(最小油门)~ 2000us(最大油门)(典型遥控器信号)。#更新 PWM 频率为 50Hz(标准 RC 频率)。# 3️⃣ 设置舵机的 PWM 范围SERVO_MIN_PULSE = 1000 # 1000us → 0°SERVO_MAX_PULSE = 2000 # 2000us → 180°SERVO_RANGE = 180 # 舵机角度范围(0° - 180°)# 4️⃣ 计算 PWM 幅度def set_servo_angle(channel, angle): """使用 set_pwm 设置舵机角度""" pulse_length = 1000000 / pca.frequency # 计算 PWM 总周期(微秒) pulse_length //= 4096 # PCA9685 12-bit 分辨率,每步 = 总周期 / 4096 # 计算脉冲宽度(单位:4096 级) pulse = int((angle / SERVO_RANGE) * (SERVO_MAX_PULSE - SERVO_MIN_PULSE) + SERVO_MIN_PULSE) pulse //= pulse_length # 使用 set_pwm 设置 PWM (0=起始点, pulse=结束点) pca.set_pwm(channel, 0, int(pulse))# 5️⃣ 让舵机在 0° - 180° 之间移动servo_channel = 4 # 连接舵机的 PCA9685 通道def test_seroe(): print("0") #set_servo_angle(servo_channel, 0) # 转到 0° #time.sleep(1) #print("90") #set_servo_angle(servo_channel, 90) # 转到 90° time.sleep(1) #print("180") set_servo_angle(6, 45) # 转到 180° #time.sleep(1) #pca.frequency = 1000 # PWM 频率 # PCA9685 控制通道pwm_channels = {"M1": 0, "M2": 1, "M3": 2, "M4": 3}current_speed = 50Dgree_pin ={'yaw':4,'roll':5,'pitch':6} # 设定电机方向和速度def set_motor_direction(motor, direction): pin1, pin2 = motor_pins[motor]# 1 motor 2 pin if direction == "FORWARD": GPIO.output(pin1, GPIO.HIGH) GPIO.output(pin2, GPIO.LOW) elif direction == "BACKWARD": GPIO.output(pin1, GPIO.LOW) GPIO.output(pin2, GPIO.HIGH) elif direction == "STOP": GPIO.output(pin1, GPIO.LOW) GPIO.output(pin2, GPIO.LOW) def set_motor_speed(motor, speed): # 1 speed if speed >100: speed=100 elif speed<0: speed=0 pwm_id=pwm_channels[motor] speed_pwm = int((speed / 100) * 0xFFFF) print(motor,pwm_id,speed,speed_pwm) pca.set_pwm(pwm_id,0,speed_pwm) #pca.channels[pwm_id].duty_cycle = int((speed / 100) * 0xFFFF)def set_dgree(pin, speed): # 1 speed if speed >100: speed=100 elif speed<0: speed=0 pwm_id=Dgree_pin[pin] speed_pwm = int((speed / 100) * 0xFFFF) print(pin,pwm_id,speed,speed_pwm) pca.set_pwm(pwm_id,0,speed_pwm) def set_all_speed(speed): set_motor_speed("M1", speed) set_motor_speed("M2", speed) set_motor_speed("M3", speed) set_motor_speed("M4", speed) def move_forward(speed): set_motor_direction("M1", "FORWARD") set_motor_direction("M2", "FORWARD") set_motor_direction("M3", "FORWARD") set_motor_direction("M4", "FORWARD") set_motor_speed("M1", speed) set_motor_speed("M2", speed) set_motor_speed("M3", speed) set_motor_speed("M4", speed) def move_backward(speed): set_motor_direction("M1", "BACKWARD") set_motor_direction("M2", "BACKWARD") set_motor_direction("M3", "BACKWARD") set_motor_direction("M4", "BACKWARD") set_motor_speed("M1", speed) set_motor_speed("M2", speed) set_motor_speed("M3", speed) set_motor_speed("M4", speed) def turn_left(speed): set_motor_direction("M1", "BACKWARD") set_motor_direction("M2", "BACKWARD") set_motor_direction("M3", "FORWARD") set_motor_direction("M4", "FORWARD") set_motor_speed("M1", speed) set_motor_speed("M2", speed) set_motor_speed("M3", speed) set_motor_speed("M4", speed) def turn_right(speed): set_motor_direction("M1", "FORWARD") set_motor_direction("M2", "FORWARD") set_motor_direction("M3", "BACKWARD") set_motor_direction("M4", "BACKWARD") set_motor_speed("M1", speed) set_motor_speed("M2", speed) set_motor_speed("M3", speed) set_motor_speed("M4", speed) def stop(): set_motor_direction("M1", "STOP") set_motor_direction("M2", "STOP") set_motor_direction("M3", "STOP") set_motor_direction("M4", "STOP") speed=0 set_motor_speed("M1", speed) set_motor_speed("M2", speed) set_motor_speed("M3", speed) set_motor_speed("M4", speed)# 视频流服务器def video_stream_server(): server = socket.socket(socket.AF_INET, socket.SOCK_STREAM) server.bind(('0.0.0.0', 5002)) server.listen(5) print("视频服务器启动,等待连接...") client, addr = server.accept() print(f"视频客户端连接:{addr}") cap = cv2.VideoCapture(0) while True: success, frame = cap.read() if not success: break frame = cv2.resize(frame, (640, 480)) # 降低分辨率 _, buffer = cv2.imencode('.jpg', frame, [cv2.IMWRITE_JPEG_QUALITY, 50]) # JPEG 压缩 data = pickle.dumps(buffer) client.sendall(struct.pack("Q", len(data)) + data) # 发送数据大小+压缩图像 time.sleep(0.05) # 控制帧率 (20FPS) cap.release() client.close() # 控制指令服务器def control_server(): global current_speed server = socket.socket(socket.AF_INET, socket.SOCK_STREAM) server.bind(('0.0.0.0', 5003)) server.listen(5) print("控制服务器启动,等待连接...") while True: client, addr = server.accept() print(f"控制客户端连接:{addr}") while True: try: data = client.recv(1024).decode().strip() if not data: break print("Rec data:",data) if data.startswith("FORWARD"): _, speed = data.split() current_speed = int(speed) print(f"FORWARD 速度设置为 {current_speed}%") move_forward(current_speed) elif data.startswith("BACKWARD"): _, speed = data.split() current_speed = int(speed) print(f"BACKWARD 速度设置为 {current_speed}%") move_backward(current_speed) elif data.startswith("LEFT"): _, speed = data.split() current_speed = int(speed) print(f"LEFT 速度设置为 {current_speed}%") move_backward(current_speed) elif data.startswith("RIGHT"): _, speed = data.split() current_speed = int(speed) print(f"RIGHT 速度设置为 {current_speed}%") move_backward(current_speed) elif data.startswith("ALLSPEED"): _, speed = data.split() current_speed = int(speed) print(f"速度设置为 {current_speed}%") set_all_speed(current_speed) elif data == "STOP": stop() elif data.startswith("yaw"): _, speed = data.split() print(f"yaw 设置为 {speed}%") set_dgree('yaw', int(speed)) elif data.startswith("roll"): _, speed = data.split() print(f"roll 设置为 {speed}%") set_dgree('roll', int(speed)) elif data.startswith("pitch"): _, speed = data.split() print(f"pitch 设置为 {speed}%") set_dgree('pitch', int(speed)) #stop() client.send(b"OK") except: break client.close() if __name__ == "__main__": #threading.Thread(target=video_stream_server, daemon=True).start() #threading.Thread(target=control_server, daemon=True).start() while True: #time.sleep(1) test_seroe() |



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧
· 园子的第一款AI主题卫衣上架——"HELLO! HOW CAN I ASSIST YOU TODAY
2019-07-13 开源项目(9-0)综述--基于深度学习的目标跟踪sort与deep-sort