

https://ardupilot.org/dev/docs/raspberry-pi-via-mavlink.html

https://dronekit-python.readthedocs.io/en/latest/guide/connecting_vehicle.html

https://ardupilot.org/plane/docs/common-telemetry-port-setup.html#common-telemetry-port-setup


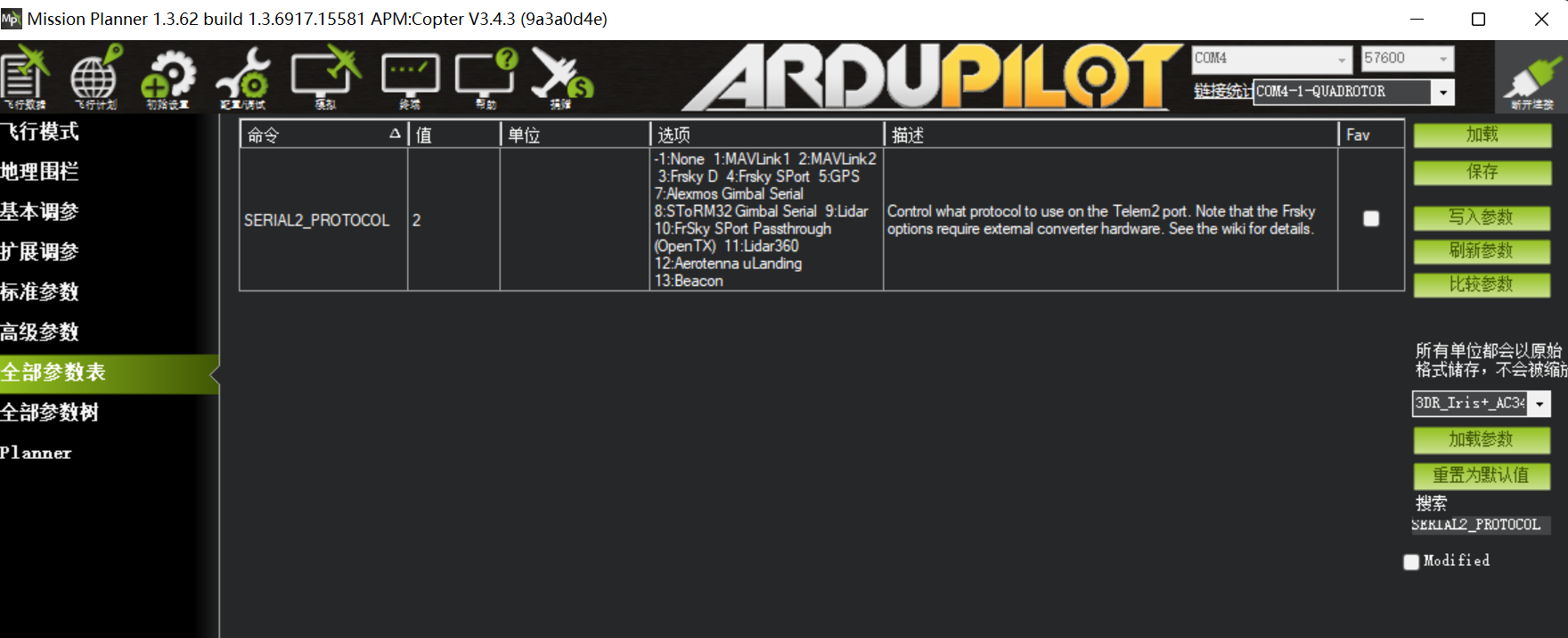
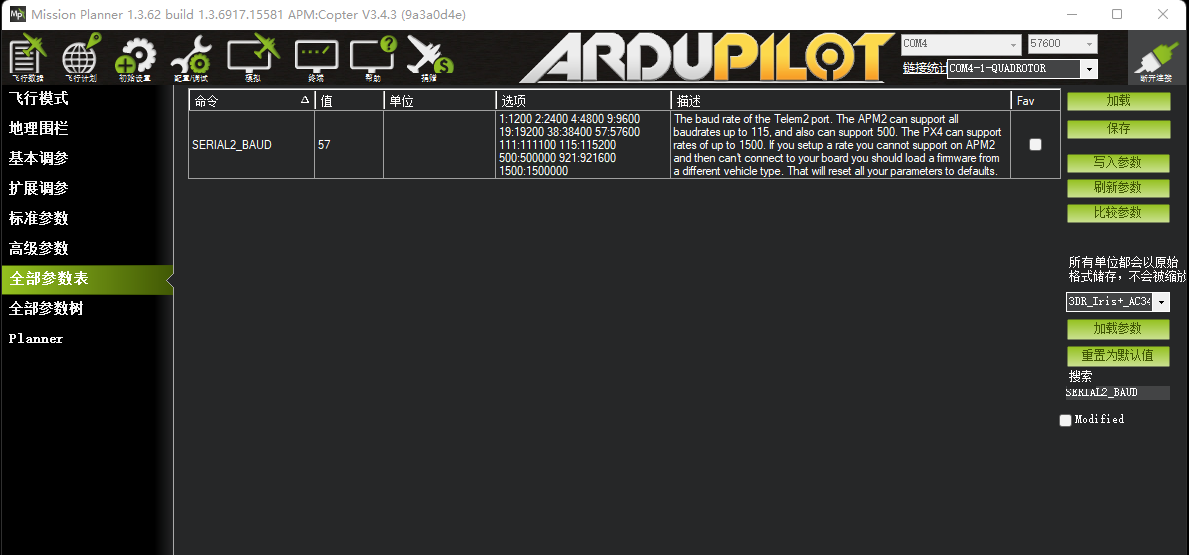
SERIALx_PROTOCOL参数(其中“x”是从 0 到 4 的数字,即SERIAL1_PROTOCOL)控制串行端口的协议或用途。您将在 wiki 页面上看到,包括用于选择适当协议的Lightware Lidar 页面说明。SERIALx_BAUD(即SERIAL1_BAUD)设置串口的波特率或速度。- BRD_SER1_RTSCTS和BRD_SER2_RTSCTS参数允许在 Telem1 和 Telem2 上启用或禁用流量控制。
SERIAL2_PROTOCOL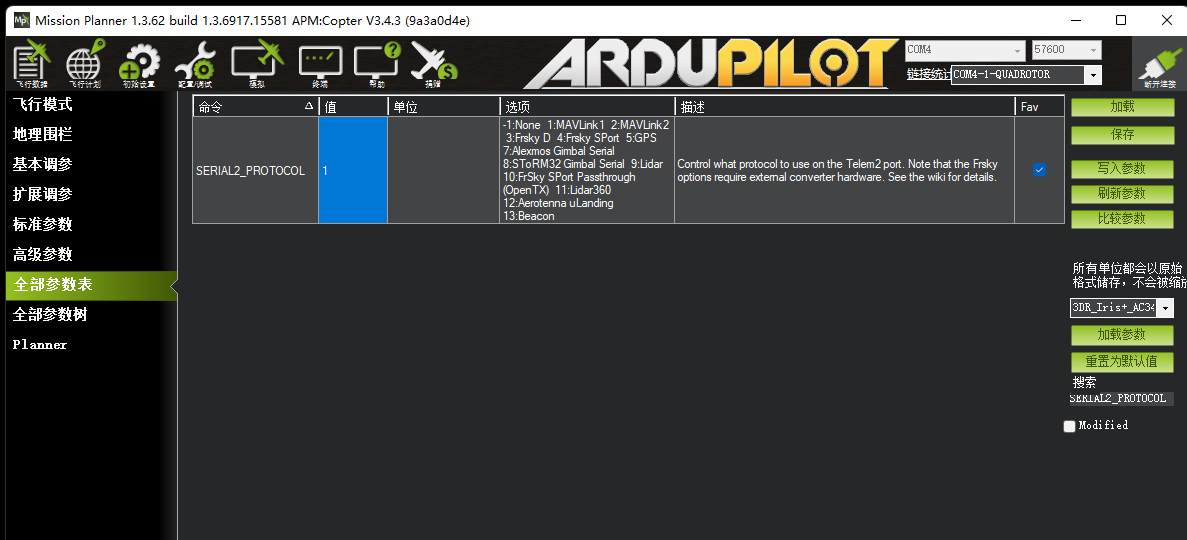
SERIAL2_BAUD
BRD_SER2_RTSCTS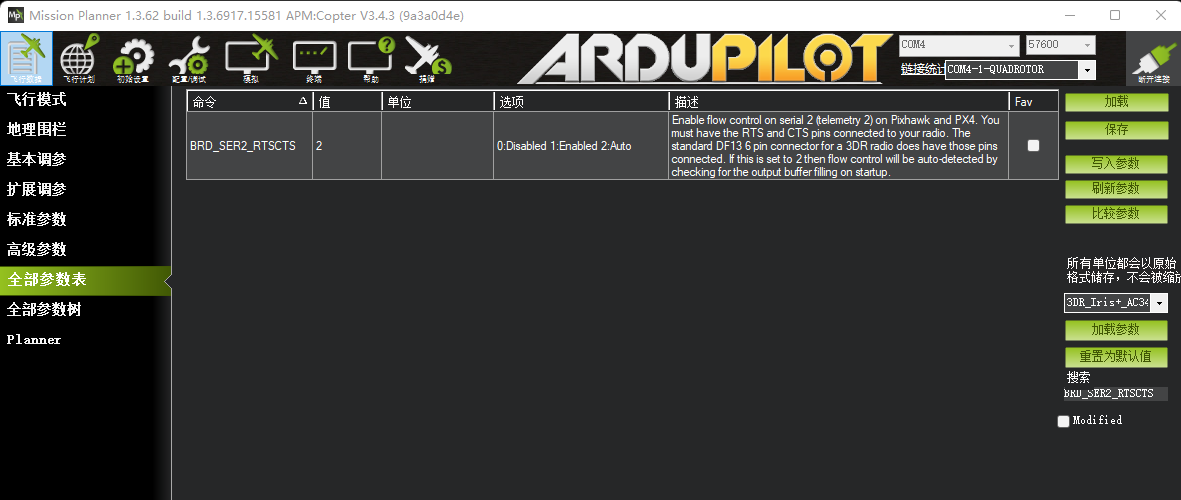
基于单目视觉的四旋翼定点降落——如何通过mavros控制pixhawk
https://blog.csdn.net/zhengyuxin0507/article/details/80357405
http://wiki.ros.org/mavros

