

Windows 上必须存在连接硬件的驱动程序,因为这使Mission Planner可以使用连接的 COM 端口和默认数据速率。

Pixhawk USB 连接

使用 SiK Radio 连接
在Mission Planner上,使用屏幕右上角的下拉框设置连接和数据速率。
连接 USB 或遥测无线电后,Windows 将自动为您的自动驾驶仪分配一个 COM 端口号,该端口号将显示在下拉菜单中(实际数字无关紧要)。还设置了连接的适当数据速率(通常 USB 连接数据速率为 115200,无线电连接速率为 57600)。
选择所需的端口和数据速率,然后按Connect 按钮连接到自动驾驶仪。连接后Mission Planner 将从自动驾驶仪下载参数,按钮将变为Disconnect,如图所示:
小费
“选择端口”下拉菜单还包含 TCP 或 UDP 端口选项,可用于通过网络连接到自动驾驶仪。
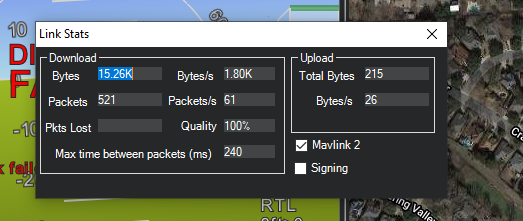
端口选择框下方的“Stats...”热链接,如果单击,将提供有关连接的信息,例如签名安全是否处于活动状态,链接统计信息等。有时此窗口会在当前屏幕下方弹出,必须带上到前面才能看到。
遥测/串口设置
https://doc.cuav.net/tutorial/copter/advanced-configuration/set-serial.html
本文介绍如何在飞行控制器上配置遥测端口(也称为串行端口)。 说明使用Pixhawk,但它们适用于大多数飞行控制器。
概述
在Pixhawk上共有5个串行端口。 每个端口的默认使用是:
-
微型USB端口(也称为Serial0)用于使用USB电缆连接到地面站。 这不应该在飞行中连接,因为飞行代码如果飞控通过usb供电某些故障将被禁用(如电池故障保护)。
-
Telem1(又名Serial1)用于MAVLink通讯,支持流量控制。 特别适用于高功率器件(高达1安培),如RFD900遥测无线电
-
Telem2(又名Serial2)用于MAVLink通信,并支持流量控制。
-
GPS(又名Serial3)用于连接GPS
-
串行4/5在单个端口上包含两个串行连接。 Serial4通常用于第二个GPS。 Serial5是一个调试连接(debug)。


